Предлагаемое изобретение относится к гироскопическим компасам. Точность означенных компасов зависит, главным образом, от соотношения между направляющей силой гироскопического органа и трением на подвесах его. Трение зависит от числа и рода подшипников, применяемых для подвешивания чувствительного органа. Значительное влияние на надежность компаса оказывают также опоры для подвешивания, т.е. точки соприкосновения гироскопического органа с органом, охватывающим его.
Предлагаемое изобретение имеет целью повысить точность и надежность гироскопического компаса путем применения системы подвеса.
Компас состоит из шара, устроенного для вращения вокруг приблизительно горизонтальной оси и для обеспечения свободного поворачивания в любом направлении, поддерживаемого тонким слоем воздуха, и из связанной с этим шаром нагруженной части для сообщения ему прецессии.
Это приспособление помещается внутри упомянутого шара и рассчитано на успокоение его колебаний. Кроме того, предусмотрена чаша для поддерживания шара на образующемся тонком слое воздуха и не соприкасающаяся с гироскопическим органом следящая система для поддерживания чаши в заданном положении относительно оси вращения шара.
В форме выполнения, особенно пригодной для применения на судне, шар совершенно независим в отношении 1) устройства для его привода, 2) устройства для сообщения ему прецессии и 3) устройства для гашения колебаний.
Устройства для успокоения колебаний и Для искания меридиана, хотя и монтированы в шаре, но не вращаются вместе с ним и потому центробежная сила не оказывает на них влияния. Благодаря этому устройства для приведения в плоскость истинного, меридиана и для успокоения не зависят от точности следящей системы, центробежной силы и изменений скорости вращения.
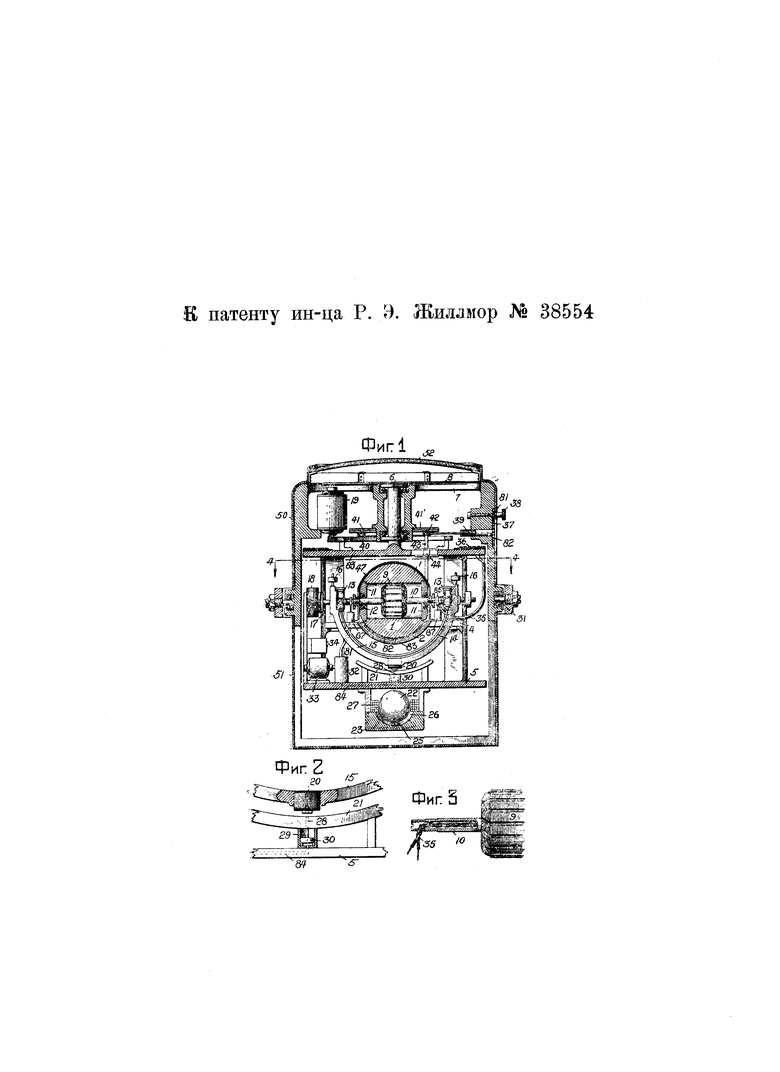
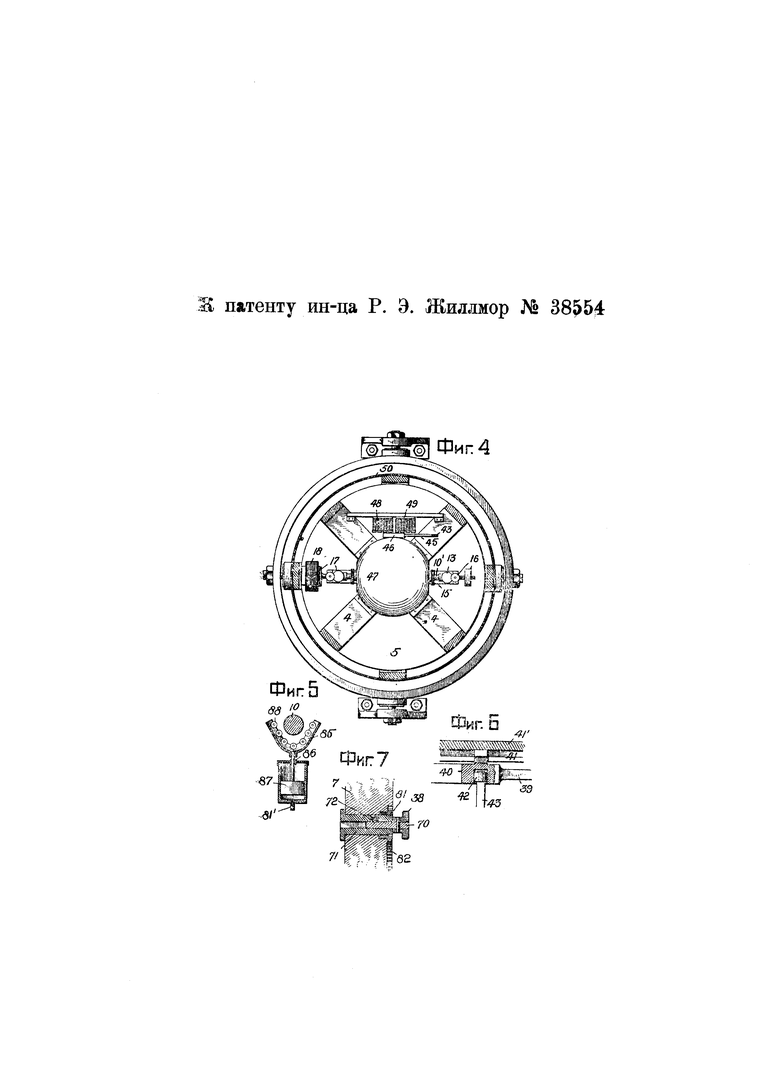
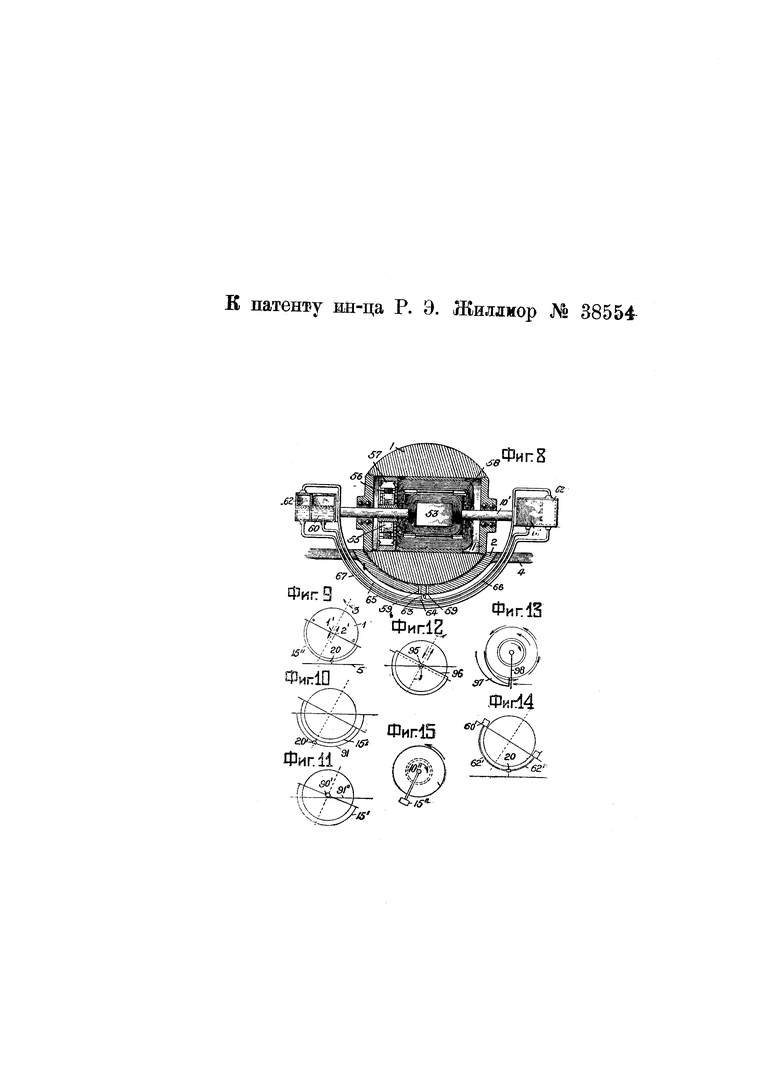
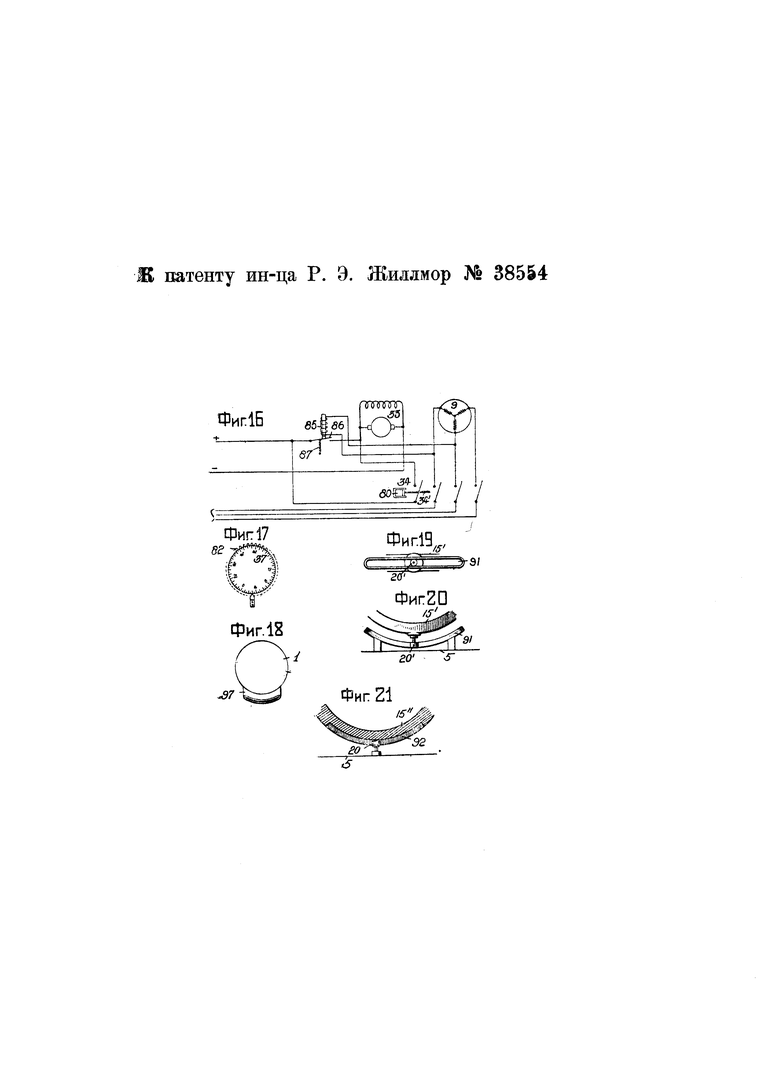
На чертеже фиг. 1 изображает схематический вид примерной формы выполнения гирокомпаса; фиг. 2 - электромагнит, направляющую для поглощения реакций статора и пневматически управляемый центрирующий штифт для запирания скобы, при пуске (разрез в увеличенном масштабе); фиг. 3 - частичный вид, в увеличенном масштабе, показывающий способ введения провода в статор; фиг. 4 - разрез по линии 4-4 на фиг. 1; фиг. 5 - форму выполнения центрировочного приспособления, работающего совместно с валом статора; фиг. 6 - приспособление для монтировки эксцентрического кольца на коррективном приспособлении; фиг. 7 - видоизмененную форму выполнения съемной коррективной головки и стержня; фиг. 8 - другую форму выполнения компаса с приводом постоянного тока и с устройствами для установки в плоскости меридиана и гашения колебаний, не поддающимися влиянию четвертных движений, а потому делающими излишней стабилизацию компаса в его кольцах; фиг. 9-15 - различные расположения шара, рамки и реактивного подшипника; фиг. 16 - схему соединений, показывающую цепи тока для автоматического регулирования поддерживающего слоя воздуха; фиг. 17 - деталь шкалы широт; фиг. 18 - схематический вид, перпендикулярный к фиг. 13; фиг. 19 - вид снизу видоизмененной формы выполнения соединения скобы на гироскопе с маятниковой опорой; фиг. 20 - то же, вид сбоку; фиг. 21 - вид сбоку другой видоизмененной формы соединения скобы с маятниковой опорой, показанной также схематически на фиг. 9 и 14.
Шар 1 (фиг. 1) вращается в чаше 2, но отделен от нее слоем воздуха, который может подводиться или же может образовываться вследствие вращения шара. Чаша 2 поддерживается рамой 4 в следящей системе 5, которая, в свою очередь, поддерживается стержнем 6 в крестовине 7. Этот стержень несет на своей верхней стороне катушку. Шар приводится в движение трехфазным статором 9, насаженным на полой оси 10. Последняя выступает через концевые стенки 11, причем шариковые подшипники 12 между осью 10 и концевыми стенками 11 обеспечивают доведение до минимума трения между системой шара и валом статора. На концах вала статора укреплены успокоительные сосуды 13, соединенные узкой трубкой 14. К оси 10 статора прикреплена рамка 15, часть которой составляют компенсационные грузы 16. Можно применять любую подходящую следящую систему, не соприкасающуюся с гироскопической системой и не передающую на нее крутящего момента. Для этой цели можно также прикрепить к скобе якорь из мягкого железа, работающий совместно с трансформатором или индукционной катушкой 18 и так управляющий через ламповый усилитель азимут-мотором 19, что система следящего кольца начинает следовать всем азимутальным движениям оси гироскопического шара.
Гироскопический или чувствительный орган (фиг. 1) состоит из шара, статора, вала статора, рамки, успокоительных сосудов и якоря из мягкого железа для управления следящим движением.
Так как шар поддерживается слоем воздуха, то он имеет свободу вращения вокруг оси вращения, вертикальной оси и поперечной горизонтальной оси.
При пропускании через статор трехфазного тока статор дает на шаре крутящий момент вокруг оси, совпадающий с осью вала статора. Получается соответствующий реакционный крутящий момент, стремящийся повернуть статор. Эта реакция поглощается прикрепленной к концам вала статора рамкой. Реакция рамки поглощается магнитом 20, работающим совместно с направляющей 21, ширина которой в точности равна ширине полюсного наконечника электромагнита. Рабочая поверхность направляющей концентрична рабочей поверхности рамки и потому электромагнит не оказывает противодействия поворачиванию рамки вокруг оси, перпендикулярной к оси вращения. Когда же ось шара приблизительно горизонтальна, электромагнит не противодействует поворачиванию рамки вокруг вертикальной оси. Однако, при поворачивании вокруг оси вращения всякое движение рамки увеличивало бы промежуток между полюсным наконечником электромагнита и дорожкой, а потому электромагнит будет предупреждать такое поворачивание рамки и будет удерживать ее в практически вертикальной плоскости.
По причинам, хорошо известным специалистам, гироскопический орган, сходный с показанным на фиг. 1 и снабженный маятником, поддавался бы влиянию четвертных движений. По этой причине предпочитается стабилизировать компас в одной плоскости. Было бы достаточным стабилизировать только рамку, но лучше стабилизировать весь компас, так как это, помимо предупреждения четвертной девиации, предупреждает еще и так называемую погрешность подвесов. Во всех стандартных формах гирокомпасов ускорения в плоскости четвертей вызывают отклонение номинальной вертикали системы компаса от истинной вертикали в четвертной плоскости и это отклонение дает вращательное движение вокруг вертикали компаса, показывая таким образом, изменение курса в то время, как курс в действительности оставался постоянным. Такие ошибки не превышают  градуса и, так как направление их постепенно изменяется на обратное, то, с навигационной точки зрения, они не имеют значения. Если, однако, гирокомпас применяется в комбинации с аппаратами для наводки орудий, то погрешность в подвесах может вызвать погрешность в наводке в момент выстрела.
градуса и, так как направление их постепенно изменяется на обратное, то, с навигационной точки зрения, они не имеют значения. Если, однако, гирокомпас применяется в комбинации с аппаратами для наводки орудий, то погрешность в подвесах может вызвать погрешность в наводке в момент выстрела.
Для стабилизации компаса в его подвесах применяется шаровой гироскоп.
Шаровой гироскоп 22 (фиг. 1) вращается в чаше 23 на слое воздуха, который может получаться подведением из внешнего источника или вследствие вращения шара или обоими способами. К шару прикреплен подшипник 25, перемещающийся в криволинейной направляющей канавке 26 в чаше. Шар приводится в движение статором 27, служащим также и для центрирования без колебаний оси шара.
Опыт показал, что при точном выполнении поверхностей шара и чаши и если вес шара не превышает давления в 2 кг на 1 квадратный дюйм поверхности, проектированной на горизонтальную плоскость, вращение шара создает между шаром и чашей слой воздуха, достаточно плотный и толстый для предупреждения соприкосновения шара с чашей при давлениях от ускорения выше 2 дюймов. Такой слой воздуха поддерживает шар, повидимому, благодаря приставанию молекул воздуха к поверхности шара и чаши.
Способ работы такого стабилизационного приспособления состоит в следующем. Осью, вокруг которой требуется стабилизировать компас, является северо-южная ось подвешенного в кольцах компаса. Предположим, что качка судна вызывает ускорение вокруг этой оси. Давление от ускорения будет передаваться на вращающийся шар через канавку 27 и подшипник 25. Благодаря быстрому вращению шара это давление будет встречать сопротивление и шар получит прецессию вокруг оси, перпендикулярной к плоскости чертежа, что заставит подшипник 25 перемещаться по канавке 26 в плоскости чертежа. Если вес и скорость шара подобраны соответственно маятниковому коэфициенту массы компаса, то прецессия будет медленной и период качания судна будет меньше времени, необходимого для достижения подшипником 25 конца канавки 26.
При бортовой качке в плоскости чертежа шар не дает стабилизирующего эффекта, компас может поэтому свободно колебаться и подшипник 25 перемещается свободно к тому или другому концу канавки 26. Если при каких-либо условиях желательна стабилизация вокруг обеих горизонтальных осей, то под шаровым стабилизатором можно поместить еще один стабилизатор, но с направляющей, перпендикулярной к канавке 26.
Одним из преимуществ такого стабилизатора является почти полное отсутствие трущихся частей. Единственной трущейся частью является маленький подшипник, который к тому же несет нагрузку только тогда, когда стабилизирует чашу; износ его ничтожен, так как маятниковый коэфициент компаса можно понизить до очень малого значения, так что, для поддержания массы компаса в пределах точного градуса от вертикали достаточно совершенно незначительного стабилизирующего движения.
Другим важным преимуществом описанного способа стабилизации является автоматическое центрирующее действие статора. Для уяснения этого следует рассмотреть действие гироскопического стабилизатора обычной формы, в которой стабилизирующий гироскоп так поддерживается, что имеет свободу прецессии вокруг заданной оси. Трение на стабилизованной оси и на оси прецессии неизбежно будет при вращении в одном направлении больше, чем при вращении в другом. Вследствие этого центрирование стабилизирующего гироскопа вокруг его оси прецессии будет нарушено и он может прийти в положение, при котором плоскость вращения гироскопа совпадает с плоскостью, в которой требуется стабилизация компаса, и тогда гироскоп не будет стабилизировать. Для предупреждения такого децентрирования необходимо предусмотреть центрирующие пружины, но, как известно, такие пружины смогут дать центрирование только при смещении сперва стабилизованной массы вокруг стабилизованной оси, чтобы подвергнуть означенную массу действию силы тяготения и тем возвратить гироскоп в его центральное положение.
При применении для стабилизации гироскопического компаса такие колебания стабилизованной массы вызовут ошибки. В гирокомпасе, выполненном согласно предлагаемому изобретению, если неравномерное трение заставило ось вращения стабилизирующего шара отклониться от ее нормального вертикального положения, то компонента крутящего момента статора будет так действовать на шар, что ось вращения шара совпадает, вследствие прецессии, непосредственно и без колебаний с осью статора. Таким образом, ось вращения шара автоматически и непрерывно центрируется без колебаний.
Другим преимуществом стабилизатора такой формы является отсутствие прецессионного трения. Как известно, затруднительность движения теоретически совершенной стабилизации зависит от того, насколько удается устранить прецессионное трение. Время, в течение которого возможно сопротивление нарущающей силе, зависит от отношения гироскопического момента к этой силе. Отклонения от теоретически полного сопротивления объясняются трением и инерцией прецессии. При небольшом и медленном нарушающем усилии, с каким приходится иметь дело в рассматриваемом случае, главным препятствием является прецессионное трение. В данной форме выполнения стабилизатора таким трением является трение катания подшипника 25 в направляющей 26.
Шаровой стабилизатор следует помещать на следящем органе компаса так, чтобы он всегда стабилизировал против качаний компаса в восточно-западной плоскости. Достаточно, если стабилизация в этой плоскости будет такова, чтобы предупредить колебания компаса в этой плоскости, тогда как в северо-южной плоскости стабилизация должна вполне предупреждать всякое давление ускорения.
В видоизмененной форме выполнения устройства для стабилизации подвешенной массы компаса используется экваториальная струя воздуха, образующаяся вследствие быстрого вращения гирокомпасного шара. Опыты показали, что всякий быстро вращающийся шар захватывает частицы воздуха на своих полюсах, центробежная сила распространяет эти частицы по поверхности шара, а на экваторе шара они отбрасываются по касательной. Частицы воздуха экваториальной зоны, непосредственно прилегающие к поверхности, движутся со скоростью, почти равной скорости шара на его экваторе. Поэтому, поместив в этой экваториальной струе воздуха лопасти и закрепив их к какой-либо части подвешенной массы компаса, можно использовать быстро движущуюся экваториальную струю для предупреждения отклонений подвешенной массы компаса вокруг горизонтальной оси, перпендикулярной к оси вращения шара.
Помещение лопастей в экваториальную струю воздуха не вызывает, повидимому, никакой реакции на шаре, и может быть сравнено с тем, что снаряд может быть отклонен стальной плитой на некотором расстоянии от орудия и это не вызывает реакции на орудии.
При пуске компаса можно принять меры для придания ему способности очень быстро устанавливаться по меридиану. Это достигается при помощи запорного штифта 28, автоматически управляемого воздухом, подаваемым в цилиндр 29 с поршнем 30, к которому прикреплен штифт. Этот центрировочный штифт запирает рамку против поворачивания вокруг горизонтальной оси, что придает гироскопической системе те же свойства маятниковой системы, какими обладает вся система компаса, подвешенная в своих кольцах 31. После установки по меридиану шпильку освобождают.
Воздух для поддержания шара во время пуска и для запирания центрировочного штифта подается воздушным насосом 32 из него ко дну чаши через трубу 81, канал 82 и отверстие 83; воздух же для поршня 30 подводится по каналу 84. Насос приводится электродвигателем 33, которым управляет автоматический выключатель с выдержкой открывания.
Выключатель (фиг. 16) нормально открывается действием пружины 34, но открывание замедляется буфером 80. Этот выключатель замыкает цепь к двигателю, когда цепь ротора компас замкнута и держит цепь к двигателю закрытой в течение того промежутка, на который выключатель отрегулирован; затем выключатель открывается и тем останавливает двигатель, а следовательно и насос, так что центрировочный штифт опускается, а подача воздуха в чашу шара прекращается, и шар создает поддерживающий его слой воздуха собственным вращением.
Можно также предусмотреть автоматическое приспособление для восстановления воздушного слоя в случае прекращения подачи тока в двигатель. Для этой цели применяется электромагнит 85 (фиг. 16) в цепи тока ротора 9. Пока этот магнит находится под током, он удерживает выключатель 86 в открытом положении, в случае же прекращения Тока выключатель закрывается пружиной 87, и двигатель насоса снова начинает работать.
К следящему и к чувствительному органу ток подводится через крестовину, а к следящей системе - посредством контактных колец 36 и щеток (не показанных). Гибкие вводные проводники 35 подводят трехфазный ток от следящей системы к полой оси 10, на которой монтирован статор.
Обычно гироскопические компасы устанавливаются не по истинному меридиану, а по меридиану, являющемуся равнодействующей вращения земли и движения судна по поверхности земли. По этой причине, при изменении курса или скорости, компас должен переходить с одного меридиана на другой и, для избежания колебаний, эти отклонения должны происходить с той же скоростью, с какой изменяется меридиан. Скорость изменения меридиана, вследствие изменения курса и скорости, зависит от широты и от скорости изменения курса и скорости в северо-южном направлении.
Поэтому, для предупреждения колебаний, компас должен иметь определенную баллистическую характеристику для каждой широты. Это заставило ввести в некоторых точных типах компасов маятники, которые можно регулировать соответственно широте.
Для того, чтобы обойтись без регулируемого маятникового приспособления и упростить приспособление для корректирования на разность между истинным и кажущимся меридианами, применяют способ корректирования, постоянно удерживающий ось компаса на истинном меридиане.
В шаровом компасе (фиг. 1) это достигается чрезвычайно просто. Коррективный установочный орган 37 (фиг. 1 и 17), монтированный на валу 39, управляется накатанной головкой 38 через шестерни 81 и 82.
На органе 37 имеются произвольные деления от 0 до 100. К системе компаса прикреплена таблица, показывающая, на какую цифру следует установить коррективную шкалу для каждой скорости судна и широты. При установке на эту цифру орган 37 создает через внутреннюю резьбу вала 39 требуемый эксцентриситет к круглому кулаку 40, в канавках 41 (фиг. 1 и 6) на нижней стороне шайбы 41′ на крестовине. Эксцентрическим кулаком 40 соединен монтированный на следящей системе стержень 42, передающий от кулака надлежащую компоненту для корректирования на курс (фиг. 6). Головку 38 можно выполнить съемной для надевания крышки 50; головка насажена на стержень 70 (фиг. 1), который скользит в полом валу 71 шестерни 81 и удерживается в положении запорным штифтом 72.
Стержень 42 смещает в боковом направлении стержень 43 на ползуне 44 на крышке 83 следящей рамы. На своем нижнем конце стержень 43 несет плечо 45 (фиг. 4), несущее, в свою очередь, якорь 46, прилегающий к раме 4 шара. Этот якорь открывает и закрывает поверхность полюсов трехфазных статоров 48 и 49, обмотанных в различном направлении, так как эти статоры питаются трехфазным током, то от их внутренних краев к наружным всегда имеется электромагнитный крутящий момент, очень небольшой, но достаточный для того, чтобы вызвать значительный крутящий момент вокруг вертикальной оси шара.
Благодаря противоположности направления обмоток статоров крутящий момент, вызываемый одним из них, равен крутящему моменту, вызываемому другим и, если бы не было Якоря 46, то крутящий момент на шаре был бы равен нулю.
Величину крутящего момента, вызываемого на шаре тем или другим статором, можно точно регулировать, регулируя степень покрывания полюсов статоров якорем 46. Когда; якорь находится в положений, показанном на фиг. 4, крутящий момент, вызываемый одним из статоров, нейтрализуется крутящим моментом, вызываемым другим статором. Когда корректор перемещает якорь по полюсам статора 48, то крутящий момент этого статора понижается, а крутящий момент статора 49 повышается, так что на шаре получается крутящий момент в направлении крутящего момента, вызываемого статором 49. При перемещении якоря в противоположном направлении на шаре получится крутящий момент также противоположного направления. Крутящий момент, действующий на шар, можно точно регулировать и потому коррективный механизм может давать в точности заданный эффект, изменяя точку установки гироскопической системы при помощи заданного крутящего момента вокруг вертикальной оси.
При этом методе корректирования следует применять гироскопическую систему с очень большим периодом, т.е. вместо 85 минут для широты 45° применять нормальный период работы в 3-4 часа или больше. При ускорении хода судна корректор поддерживается установленным на скорость судна и потому дает на чувствительном органе крутящий момент, вызывающий изменение точки остановки, равное и противоположное тому, которое было бы вызвано ускорением хода судна, благодаря чему чувствительный орган не отклоняется от истинного меридиана.
Период выбирается достаточно большой, так что изменения скорости или курса не вызывают заметных колебаний.
Для предупреждения проникания пыли в компас и особенно в слой воздуха между шаром и чашей компас закрыт в пыленепроницаемой коробке, состоящей из двух плотно пригнанных частей 50 и 51. На верхней части коробки имеется выпуклое стекло 52, через которое видна картушка.
Видоизмененная форма выполнения компаса (фиг. 8) позволяет применять для привода шара постоянный ток. Здесь неподвижный многополюсный электромагнит 53 укреплен на оси 10, пропущенной через концевые стенки шара. К валу прикреплена щеточная рама, несущая щеткодержатели 55 и щетки 56, скользящие по внутреннему коллектору 57, плотно вставленному в осевом отверстии в шаре. В этом отверстии укреплена также якорная обмотка 58, зажимы которой припаяны к пластинкам коллектора.
Чаша для шара сходна с показанной на фиг. 1, но имеет два маленьких отверстия 59.
Вращение шара создает в нижней части чаши давление определенной величины, зависящее от скорости шара. Ось, пропущенная через концевые стенки шара, несет две пары сосудов для ртути, масла или другой жидкости. Одна из этих пар 60, 61 создает движение прецессии, а другая 62, 621 служит для успокоения колебаний.
Ртуть в сосудах 60 и 61 течет при наклонении гироскопа к его более низкой стороне и потому гироскоп будет вращаться против вращения земли. Однако, вследствие сужения трубки 67 между обоими ртутными сосудами жидкость не может быстро перетекать из одного сосуда в другой и потому четвертная боковая качка не оказывает на нее заметного влияния.
Для успокоения колебаний такого компаса необходимо, в противоположность обычному методу, подводить энергию в систему. Благодаря применению суженной трубки 67 перетекание жидкости между сосудами 62-621 не совпадает по фазе с наклонением главного гироскопа, и это успокаивает колебания компаса. При наклонении оси шара влиянием вращения земли отверстия 63 и 64 трубок 65 и 66 устанавливаются против одного из отверстий чаши и тем впускают воздух в один из успокоительных сосудов 62-621; таким образом, масло продувается через трубу 671 в сосуд на более высокой стороне.
На фиг. 5 показана видоизмененная форма выполнения центровального приспособления для удерживания вала чувствительного органа при пуске. Это приспособление можно применять в дополнение к подведению пускового воздуха через отверстие 83 или взамен его. При таком устройстве, на обоих концах вала 10 имеется по U-образной обойме 85, нормально не прилегающей к валу. Эти обоймы монтированы на поршнях 86 и 87. При пуске воздух из воздушного насоса 32 впускается в цилиндр через отверстие 811 и поднимает обойму вплотную шарикоподшипником 88 к оси 10, причем вал поднимается, а с ним поднимается и шар 1 из чаши 2. Поршень остается в таком положении до тех пор, пока шар не разовьет скорости; тогда воздух из насоса отсекается, как было описано выше. Это центрирующее устройство можно использовать и для другой цели, снабдив его автоматическим приспособлением, которое, в случае прекращения тока к компасу, управляло бы этим устройством, присоединив цилиндр к воздушному насосу 32, который управляется автоматически.
Спроектировано несколько форм выполнения компаса с осевым статором, показанным на фиг. 1. Общее устройство всех этих форм сходно с показанным на фиг. 1 и потому описание их достаточно, иллюстрируется схематическими чертежами фиг. 9-14, на которых показаны шар, рамка, опора, поглощающая реакцию рамки, и следящая система. Здесь, как и при выполнении по фиг. 1, реакция рамки может восприниматься либо работающим совместно с направляющей электромагнитом (фиг. 3), либо роликовым подшипником, работающим совместно с направляющей канавкой 201 и 91 (фиг. 19 и 20). Этот подшипник может быть монтирован на рамке 151, а направляющая с канавкой на следящей системе 5 (фиг. 19 и 20) или же направляющая 92 (фиг. 21) может быть монтирована на рамке 151, а роликовый подшипник 20 - на следящей системе 5.
Подшипник 20 (фиг. 5) монтирован на следящем органе и работает совместно с маятниковой рамкой 151. Такой компас будет самоуспокаивающимся и не требует успокоительных сосудов. Это становится понятным при рассмотрении сил, действующих на шар при наклонении оси компаса влиянием вращения земли. Как видно из фиг. 9, ось компаса направлена на восток и, следовательно, северный конец поднят вверх. Направление вращения шара показано стрелкой 21, а реакция статора - стрелкой 11. Эта реакция статора вызывает на рамке крутящий момент, направленный вниз через чертеж в точке соприкосновения подшипника с рамкой. Поэтому, подшипник оказывает на рамку давление в направлении, противоположном крутящему моменту, т.е. вверх. Это давление имеет две составляющие: одну - вокруг оси вращения шара, предупреждающую поворачивание рамки, другую - вокруг вертикальной оси, перпендикулярно к оси вращения, как показано пунктирной стрелкой 31. Составляющая вокруг вертикальной оси вызывает прецессию вокруг поперечной горизонтальной оси и тем восстанавливает горизонтальность оси вращения, что успокаивает колебания отклонения компаса от меридиана. Необходимую для успокоения колебаний энергию дает азимут-мотор. Компас такого типа требует стабилизации, так как в нем применяется маятниковая рамка.
На фиг. 14 и 8 маятниковая рамка заменена жидкостным маятником, состоящим из двух сосудов 601-611, соединенных узкой трубкой 621. Подшипник монтирован в этом случае на следящем органе и соприкасается с направляющей на рамке, как на фиг. 9. Составляющие крутящего момента, вызываемого электромагнитом 20, здесь сходны (хотя и противоположны) с таковыми при выполнении по фиг. 9, а потому ось гироскопической системы возвращается в горизонтальное положение и колебания вокруг меридиана успокаиваются.
Замедление действия жидкостного маятника делает здесь стабилизацию компаса в подвесах излишней.
Подшипник 201 (фиг. 10) монтирован на раме 151 и работает совместно с круговой направляющей 91 на следящем органе.
Из фиг. 10 видно, что подшипник при всех условиях вызывает крутящий момент только вокруг оси вращения шара и потому здесь нет успокаивающей составляющей вокруг вертикальной оси. Преимущество такого устройства заключается в возможности применять успокоение вокруг горизонтальной оси посредством перетекания жидкости (как на фиг. 1 и 8), избегая этим так называемой тангентальной погрешности широты, которая усложняет коррективный механизм.
Подшипник 901 (фиг. 11) монтирован сбоку от шара на оси, совпадающей с поперечной осью вращения шара, прикреплен к рамке 151 и работает совместно с горизонтальной направляющей на следящем органе. Подшипник вызывает крутящий момент только вокруг оси вращения и не дает успокаивающего действия.
Подшипник 95 (фиг. 12) монтирован на следящем органе и работает совместно с горизонтальной направляющей 96, прикрепленной к системе рамки. При таком устройстве получается составляющая вокруг вертикальной оси шара, перпендикулярная к его оси вращения в направлении, показанном штриховой стрелкой, и потому усиливает колебания шара.
Струи воздуха с экваториальной зоны шара (фиг. 13 и 18) можно использовать для компенсации реакций статора, избегая, таким образом, применения маятника для предупреждения поворачивания статора. Струи воздуха с шара можно концентрировать при помощи воронкообразного приспособления для получения практически любого требуемого крутящего момента на лопасти 98 на статоре. Струи воздуха можно также, при помощи соответственного расположения воронки, использовать для получения эффекта подшипников 20, 90 и 95.
Еще одна форма выполнения для достижения прецессии и успокоения схематически представлена на фиг. 15, на которой показана южная сторона компаса. Здесь прикрепленный к валу 10 статора маятник качается свободно, что позволяет обойтись без подшипника для поглощения реакции. Реакция статора вызовет отклонение маятника от вертикали на такую величину, что маятниковый крутящий момент будет в точности равен крутящему моменту реакции статора.
Опыт показал, что при таком устройстве получается удовлетворительное успокоение благодаря тому, что, по мере увеличения наклонения гироскопического органа, реакция маятника на статоре понижается и маятник при качании все больше и больше отклоняется от вертикали. По мере увеличения размаха маятника его баллистическое действие, т.е. крутящий момент вокруг поперечной горизонтальной оси шара, понижается и тем понижает скорость прецессии вокруг вертикальной оси так, что гироскопический орган совершает специальные движения, приближаясь к горизонтальному положению и к установке по меридиану. Энергия для успокоения колебаний гироскопического органа получается от статора, так как последний должен производить работу, чтобы сообщать маятнику качательное движение с возрастающим по мере наклонения гироскопического элемента, отклонением от вертикали.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дирекционный гироскоп | 1932 |
|
SU41975A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| ГИРОСКОП АДАПТИВНОГО РОБОТА НОВИНЬКОВА | 2001 |
|
RU2221689C2 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| Гиромагнитный дистанционный датчик курса | 1944 |
|
SU67814A1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| Гироскопическое устройство | 1958 |
|
SU120343A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОСКОСТИ МЕРИДИАНА | 1972 |
|
SU347573A1 |
| Гиромагнитный компас | 1940 |
|
SU67806A1 |
1. Гироскопический компас, отличающийся тем, что в качестве гироскопического органа в нем применен шар 1, имеющий вращение вокруг горизонтальной оси и поддерживаемый во время вращения слоем воздуха, с целью предоставления шару возможности свободного поворота в любом направлении, а в качестве органа для придания шару движения прецессии применена реагирующая на силу тяжести рамка 15, сочлененная с шаром 1.
2. Форма выполнения гироскопического компаса по п. 1, отличающаяся тем, что рамка 15, реагирующая на действие силы тяжести, подвешена на оси 10, проходящей внутри шара, и предназначена для успокоения колебаний шара.
3. Форма выполнения гироскопического компаса по п. 2 отличающаяся тем, что, с целью устранения влияния центробежной силы на рамку 15, для придания шару движения прецессии, рамка эта сочленена с шаром посредством находящихся внутри шара подшипников 12, установленных на оси 10 вращения шара.
4. При гироскопическом компасе по пп. 1-3 применение устройства для приведения шара во вращение трехфазным током, отличающегося тем, что статор 9 укреплен внутри шара на оси 10, сделанной полой, с целью пропуска внутри ее подводящих ток проводников 35.
5. При гироскопическом компасе по пп. 1-4 применение устройства для предупреждения вращения шара вследствие реакции, отличающегося тем, что в нижней части рамки 15 укреплен магнит 20, расположенный против направляющей 21, концентричной поверхности рамки и имеющей ширину, в точности совпадающую с шириною магнита, с целью удерживания последним рамки в вертикальной плоскости, благодаря стремлению сохранить постоянство величины полюсного промежутка.
6. Форма выполнения гироскопического компаса по пп. 1-5, отличающаяся тем, что для поддерживания шара на слое воздуха применена чаша 2, укрепленная посредством рамы 4 на следящей системе 5.
7. При гироскопическом компасе по пп. 1-6 применение, для стабилизации компаса в его подвесах, дополнительного гироскопического органа, выполненного в виде шара и сочлененного со следящей системой, отличающегося тем, что имеющий вращение вокруг вертикальной оси шар 22 в нижней своей части снабжен подшипником 25, предназначенным перемещаться вдоль криволинейной канавки 26 в поддерживающей чаше 23, с целью стабилизации компаса в восточно-западной плоскости, путем придания шару прецессии вокруг расположенной в этой плоскости оси, при свободном перемещении в северо-южной плоскости.
8. При гироскопическом компасе па пп. 1-7 применение электромагнитного регулировочного приспособления для создания крутящего момента вокруг вертикальной оси шара, с целью удерживания компаса на истинном меридиане, отличающегося тем, что оно состоит из двух расположенных против коробки шара трехфазных статоров 49 с намоткою в различном направлении и помещенного перед статорами подвижного якоря 46, сочлененного с корректирующим установочным органом 37, с целью введения поправки соответственно скорости, курсу и широте.
9. Форма выполнения гироскопического компаса по п. 8, отличающаяся тем, что якорь 46 укреплен посредством плеча 45 на вертикальном стержне 43, проходящем, при помощи ползуна 44, через крышку следящей системы и сочлененном, посредством стержня 42, с эксцентричным кулаком 40, монтированным на поддерживающей следящую систему крестовине и связанным той или иной передачей с установочным органом 37.
10. При гироскопическом компасе по пп. 1-10 применение приспособления для подачи воздуха в чашу, с целью поддерживания ротора во время его пуска, состоящего из насоса 32, связанного с электродвигателем 33, соединенным с цепью посредством того или иного автоматического выключателя, имеющего дополнительный электромагнит 85 для восстановления подачи воздуха, в случае отказа устройства для сообщения вращения шару.
11. При гироскопическом компасе по пп. 1-10 применение устройства для придания компасу способности быстро устанавливаться по меридиану во время пуска, отличающегося тем, что под рамкой 15 установлен центрированный штифт 28, укрепленный на поршне 30 цилиндра, соединенного с воздушным насосом 32.
