1
Изобретение относится к области судостроения, в частности к виброизолирующим устройствам судовых надстроек.
Цель изобретения - повышение качества виброизоляции при сохранении высокой надежности устройства.
На фиг. 1 дана кинематическая схема амортизирующего кренления надстройки к корпусу судна; на фиг. 2 - разрез А-А на фиг. 1 (со снятой надстройкой и блок- схемой управления реверсивно-шаговыми электродвигателями); на фиг. 3 - ргГзрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6 - блок- схема стабилизатора наклонений надстройки; на фиг. 7 - блок-схема преобразователя аналог-код.
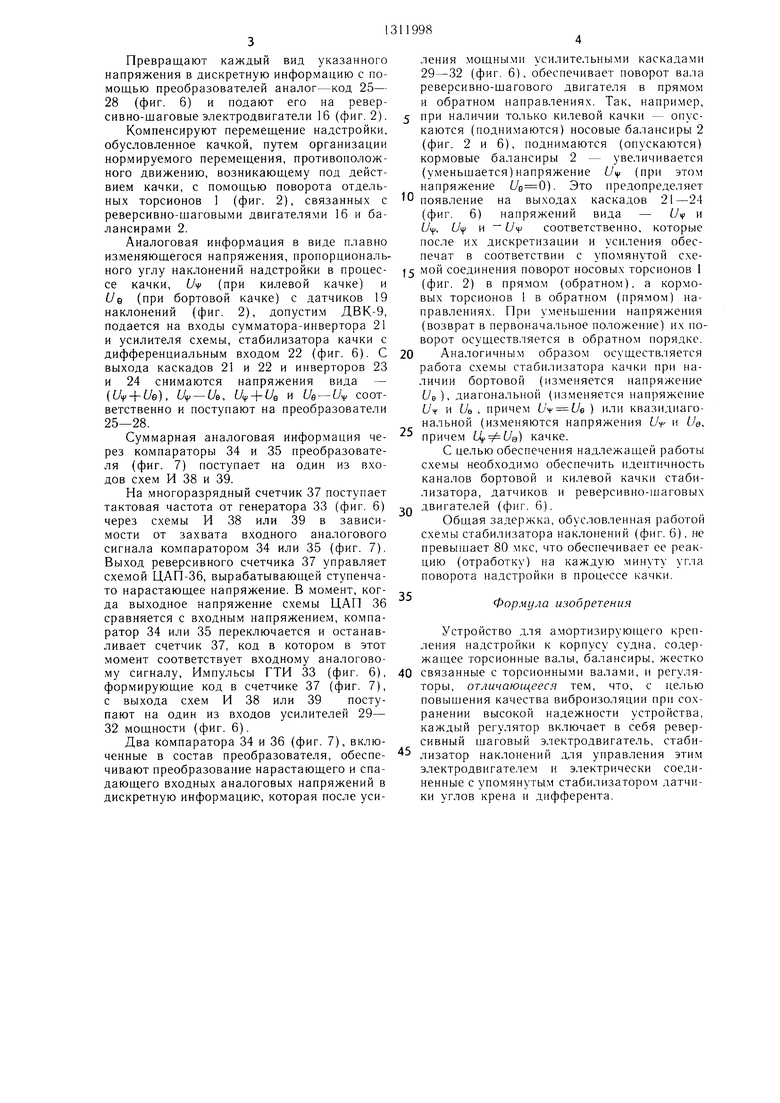
Устройство для амортизирующего крепления судовой надстройки содержит торсионные валы 1 и балансиры 2, свободно поворачивающиеся в подшипниках 3 опор 4, соединенных с корпусом 5 судна. Балансиры 2 с одного конца имеют шлице- вое соединение с головками торсионных валов 1, а другим концом соединены с надстройкой 6, причем носовые (кормовые) балансиры соединены с надстройкой с помощью цилиндрических шарниров 7, а кормовые (носовые) - с помощью серег 8, имеющих по концам цилиндрические шарниры 9. Все торсионные валы скрепляются по концам с поводками 10 регулирующих устройств. Поводки 10 свободно иоворачи- ваются в подшипниках 11 на опорах 12, соединенных с корпусом 5 судна и имеют на своих концах пальцы 13, входящие в кольцевые углубления гаек 14, насаженных на резьбовые валы 15, которые с помощью реверсивно-шаговых электродвигателей 16 могут вращаться в опорах 17, соединение двигателей 16 с валами 15 осуществлено с иомощью муфт 18. В надстройке 6 установлены датчики 19 паклоне1шй надстройки, подающие сигналы на стабилизатор 20, управляющий реверсивночцаговьз1ми электродвигателями 16.
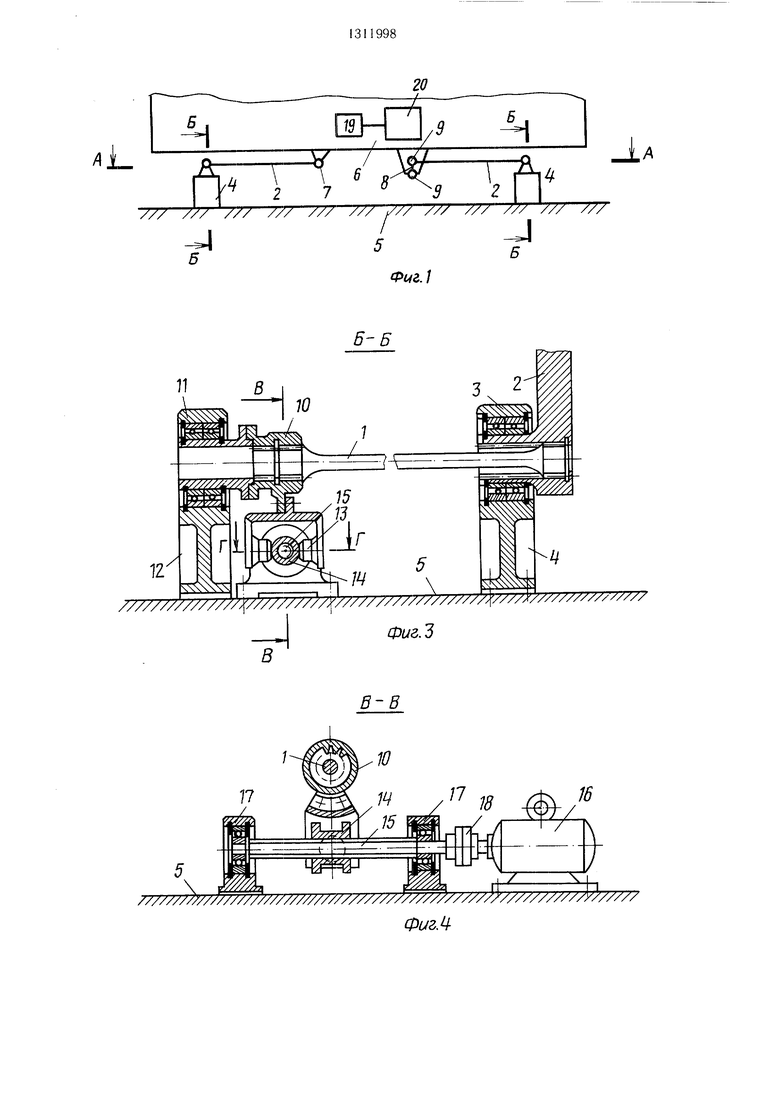
Стабилизатор наклонений (фиг. 6) состоит из сумматора-инвертора 21, усилителя 22 с дифференциальным входом, инверторов 23 и 24, преобразователей аналог-код 25-28, усилителей 29-32 мощности и генератора 33 тактовых импульсов (ГТИ), обеспечивающего синхронизацию преобразователей 25-28.
Преобразователь аналог-код (фиг. 7) состоит из компараторов 34 и 35, цифро- аналогового преобразователя 36,реверсивного счетчика 37 и схем 38 и 39 совпадения.
Преобразователь осуществляет прев- ращение аналогового напряжения и датчиков крена в дискретную форму.
Усилители мощности (УМ) 29-32 (фиг. 6) осуществляют усиление дискретных импуль25
11998
2
сов преобразователей для управления в последующем четырьмя реверсивно-шаговыми двигателями 16.
Монтаж надстройки и работа устрой5 ства происходит следующим образо.м.
Устройство закрепляется на палубе судна, при этом балансиры 2 устанавливаются на шлицах торсионных валов 1 таким образо.м, чтобы под действием расчетной силы веса надстройки они заняли горизонтальное по ложение. После установки надстройки возможен ее перекос вследствие технологических неточностей при изготовлении и монтаже торсионных валов и неточностей расчета положения центра тяжести надстройки. рекос надстройки устраняется автоматически, так как датчики 19 наклонений надстройки подают соответствующие сигналы на стабилизатор 20, управляющий реверсивно- щаговым электродвигателе.м 16, последний поворачивает резьбовой вал 15. При этом
20 гайка 14 перемеп ается вдоль вала, воздействуя стенкой выреза на пальцы 13, вследствие чего поводок 10 поворачивает торсионный вал 1 и балансир 2 устанавливается в положении, обеспечивающем отсутствие сигнала от датчиков 19, что соответствует горизонтальному положению надстройки 6.
Во время эксп,;1уатации судна вертикальная ходовая вибрация корпуса 5 судна воспринимается торсионными валами 1, испытывающими упругое кручение, и на надстройку 6 не передается. При низкочастотных колебаниях корпуса 5 судна при качке на во/шении надстройка 6 испытывает крен и дифферент. При этом датчики 19 наклонений В1)1рабатывают соответствующие
зг электрические сигналы, которые после их дискретизации и усиления стабилизатором 20 подаются на реверсивно-шаговые электродвигатели 16. Последние поворачивают резьбовые валы на угол, который соответствует горизонтальному положению надстрой40 ки. Таким образом, перемещения надстройки относительно корпуса очень малы, что обеспечивает гашение низкочастотной вибрации и повышение надежности эластичных соединений коммутаций.
Работа стабилизатора наклонений состоит в следующем.
Снимают медленно изменяющиеся напряжения, пропорциональные углам наклона надстройки во время качки L/4- (напряжение, пропорциональное углу наклона,
50 обусловленное килевой качкой) и Us, (напряжение, пропорциональное углу наклона, обусловленное бортовой качкой) с помощью датчиков 19 наклонений (фиг. 1 и 2).
С помощью сумматора-инвертора 21 (фиг. 6), усилителя 22 и инверторов 23
55 и 24 получают напряжения, представляющие сумму и и UQ, или их разность вида - (U + Ue), , LV + L/e, L/e-L/ соответственно.
30
45
10
Превращают каждый вид указанного напряжения в дискретную информацию с помощью преобразователей аналог-код 25- 28 (фиг. 6) и подают его на ревер- сивно-щаговые электродвигатели 16 (фиг. 2).
Компенсируют перемещение надстройки, обусловленное качкой, путем организации нормируемого перемещения, противоположного движению, возникающему под действием качки, с помощью поворота отдельных торсионов 1 (фиг. 2), связанных с реверсивно-щаговыми двигателями 16 и балансирами 2.
Аналоговая информация в виде плавно изменяющегося напряжения, пропорционального углу наклонений надстройки в процессе качки, и (при килевой качке) и t/9 (при бортовой качке) с датчиков 19 наклонений (фиг. 2), допустим ДВК-9, подается на входы сумматора-инвертора 21 и усилителя схемы, стабилизатора качки с дифференциальным входом 22 (фиг. 6). С 20 выхода каскадов 21 и 22 и инверторов 23 и 24 снимаются напряжения вида - (Wc + t/e), Ор - Уе, f + f/s и Ue - U v соответственно и поступают на преобразователи 25-28.
Ленин мощными усилительными каскадами 29-32 (фиг. 6), обеспечивает поворот вала реверсивно-щагового двигателя в прямом и обратном направлениях. Так, например, при наличии только килевой качки - опускаются (поднимаются) носовые балансиры 2 (фиг. 2 и 6), поднимаются (опускаются) кормовые балансиры 2 - увеличивается (уменьшается) напряжение OV (при этом напряжение (). Это предопределяет появление на выходах каскадов 21-24 (фиг. 6) напряжений вида - U«/ и Uvf, L/ifi и L v соответственно, которые после их дискретизации и усиления обеспечат в соответствии с упомянутой схе- 5 мой соединения поворот носовых торсионов 1 (фиг. 2) в прямом (обратном), а кормовых торсионов 1 в обратном (прямом) направлениях. При уменьшении напряжения (возврат в первоначальное положение) их поворот осуществляется в обратном порядке. Аналогичным образом осуществляется работа схемы стабилизатора качки при наличии бортовой (изменяется напряжение (7е ), диагональной (изменяется напряжение и и (Ув , причем L V 6 e ) или квазидиагональной (изменяются напряжения LV и Ug,
Суммарная аналоговая информация че- причем качке, рез компараторы 34 и 35 преобразовате-С целью обеспечения надлежащей работы
на один из вхо-схемы необходимо обеспечить идентичность
каналов бортовой и килевой качки стабилизатора, датчиков и реверсивно-шаговых
ля (фиг. 7) поступает дов схем И 38 и 39.
На многоразрядный счетчик 37 поступает
тактовая частота от генератора 33 (фиг. 6) .р, двигателей (фиг. 6).
через схемы И 38 или 39 в зависимости от захвата входного аналогового сигнала компаратором 34 или 35 (фиг. 7). Выход реверсивного счетчика 37 управляет схемой ЦАП-36, вырабатывающей ступенчато нарастающее напряжение. В момент, ког- ., да выходное напряжение схемы ЦАП 36 сравняется с входным напряжением, компаратор 34 или 35 переключается и останавливает счетчик 37, код в котором в этот момент соответствует входному аналоговоОбщая задержка, обуслов.ченная работой схемы стабилизатора наклонений (фиг. 6). не превьпиает 80 мкс, что обеспечивает ее реакцию (отработку) на каждую минуту уг.ча поворота надстройки в процессе качки.
Формула изобретения
Устройство для амортизирующего крепления надстройки к корпусу судна, содержащее торсионные валы, балансиры, жестко
му сигналу. Импульсы ГТИ 33 (фиг. 6), 40 связанные с торсионными валами, и регуляформирующие код в счетчике 37 (фиг. 7), с выхода схем И 38 или 39 поступают на один из входов усилителей 29- 32 мощности (фиг. 6).
Два компаратора 34 и 36 (фиг. 7), включенные в состав преобразователя, обеспе- чивают преобразование нарастающего и спадающего входных аналоговых напряжений в дискретную информацию, которая после уситоры, отличающееся тем, что, с целью повышения качества виброизоляции при сохранении высокой надежности устройства, каждый регулятор включает в себя реверсивный шаговый электродвигатель, стабилизатор наклонений для управления этим электродвигателем и электрически соединенные с упомянутым стабилизатором датчики углов крена и дифферента.
Ленин мощными усилительными каскадами 29-32 (фиг. 6), обеспечивает поворот вала реверсивно-щагового двигателя в прямом и обратном направлениях. Так, например, при наличии только килевой качки - опускаются (поднимаются) носовые балансиры 2 (фиг. 2 и 6), поднимаются (опускаются) кормовые балансиры 2 - увеличивается (уменьшается) напряжение OV (при этом напряжение (). Это предопределяет появление на выходах каскадов 21-24 (фиг. 6) напряжений вида - U«/ и Uvf, L/ifi и L v соответственно, которые после их дискретизации и усиления обеспечат в соответствии с упомянутой схе- 5 мой соединения поворот носовых торсионов 1 (фиг. 2) в прямом (обратном), а кормовых торсионов 1 в обратном (прямом) направлениях. При уменьшении напряжения (возврат в первоначальное положение) их поворот осуществляется в обратном порядке. Аналогичным образом осуществляется работа схемы стабилизатора качки при наличии бортовой (изменяется напряжение (7е ), диагональной (изменяется напряжение и и (Ув , причем L V 6 e ) или квазидиагональной (изменяются напряжения LV и Ug,
причем качке, С целью обеспечения надлежащей работы
двигателей (фиг. 6).
Общая задержка, обуслов.ченная работой схемы стабилизатора наклонений (фиг. 6). не превьпиает 80 мкс, что обеспечивает ее реакцию (отработку) на каждую минуту уг.ча поворота надстройки в процессе качки.
Формула изобретения
Устройство для амортизирующего крепления надстройки к корпусу судна, содержащее торсионные валы, балансиры, жестко
связанные с торсионными валами, и регуляторы, отличающееся тем, что, с целью повышения качества виброизоляции при сохранении высокой надежности устройства, каждый регулятор включает в себя реверсивный шаговый электродвигатель, стабилизатор наклонений для управления этим электродвигателем и электрически соединенные с упомянутым стабилизатором датчики углов крена и дифферента.
Ai
ff
20
Т
::A
±
/77 777 /77 /УХ /// /// /// /// /// /// /// ///
Б
-J
5
Фиг.1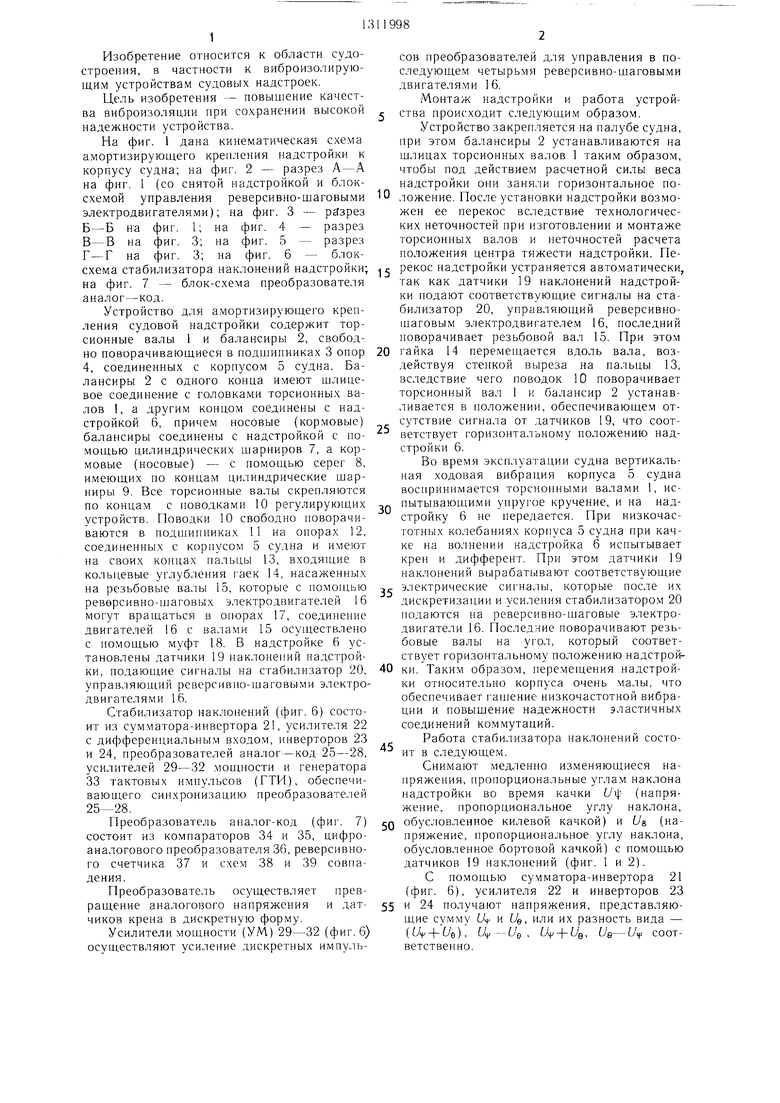
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| РЫБОЛОВНОЕ СУДНО СЕВЕРНЫХ МОРЕЙ | 2012 |
|
RU2535382C2 |
| Каботажное пассажирское судно | 2016 |
|
RU2653906C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ДВИЖЕНИЯ НАДВОДНОГО ОДНОКОРПУСНОГО ВОДОИЗМЕЩАЮЩЕГО БЫСТРОХОДНОГО СУДНА | 2013 |
|
RU2562086C2 |
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1983 |
|
SU1172817A1 |
| СУДНО | 1998 |
|
RU2137660C1 |
| Стабилизированный корпус однокорпусного килевого парусного/парусно-моторного судна | 2015 |
|
RU2623348C1 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| КОРПУС СУДНА | 2019 |
|
RU2702286C1 |
Изобретение относится к судостроению, в частности к виброизолирующим устройствам судовых надстроек. Цель изобретения - повышение качества виброизоляции при со.хранении высокой надежности устройства. Устройство содержит торсионные валы 1, балансиры 2, жестко связанные с торсионными валами 1, и регуляторы. Каждый регулятор имеет реверсивный шаговый электродвигатель 16, стабилизатор наклонений 20 для управления электродвигателем 16 и датчики 19 углов крена и дифферента, электрически соединенные со стабилизатором наклонений 20. Стабилизатор наклонений 20 обеспечивает эффективное гашение низкочастотной вибрации. 7 ил. I Г Мf Л-Л i (Л 6 ./ s 2 W ,W ,16 со со СО 00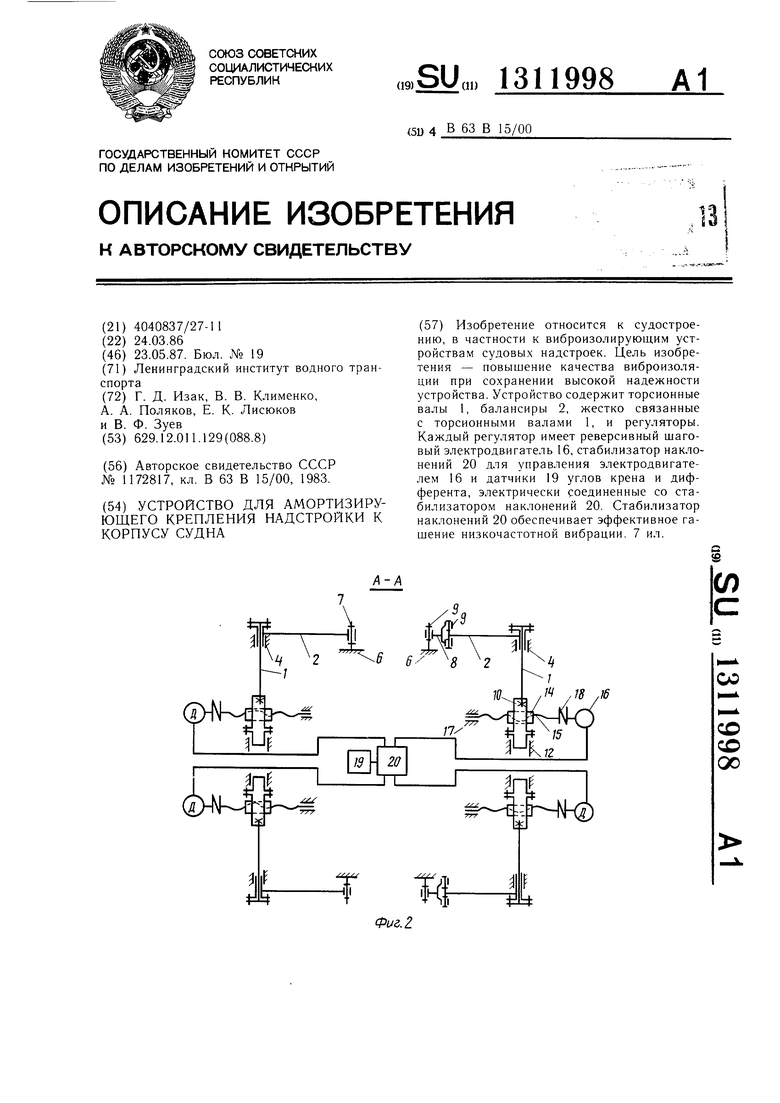
IB
///////////////////////////////////////////////////////////////y//////
Фиг.ЦФиг. 6
От ин8.
Составитель В. Долгих
Редактор Л. ГратиллоТехред И. ВересКорректор А. Зимокосов
Заказ 1927/19Тираж 409Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4;5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.1
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1983 |
|
SU1172817A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
