Изобретение относится к электротехнике и может быть использовано в электроприводах с односторонним вращением электродвигателя при реверсе нагрузки.
Целью изобретения является обеспечение стабилизации частоты вращения выходного вала рабочего механизма.
На чертеже представлена структурная схема электропривода.
Электропривод содержит электродвигатель 1 , вал которого соединен через передаточный механизм 2 с рабочим механизмом 3, и последовательно соединенные задающее устройство 4, элемент 5 сравнения и усилитель 6, выход которого подключен к электродвигателю 1 . Кроме тоге), электропривод содержит датчики 7 и 8 обратной связи и умножитель 9. Первый датчик 7 обратной связи выполнен в виде датчика частоты вращения, второй датчик 8 обратной связи выполнен в виде датчика косинуса угла и установлен на выходе рабочего механизма 3. Выходы обоих датчиков 7 и 8 подключены соответственно к входа умножителя 9, выход которого соединен с вторым входом элемента 5 сравнения .
В качестве рабочего механизма 3 в электроприводе могут быть использованы кривошипно-кулисные, кулач- ково-кулистые, кривошипно-зубчатые и другие механизмы, скорость перемещения которых изменяется по косинус идальному закону.
Электропривод работает следующим образом.
Дпя преобразования одностороннего вращения вала электродвигателя 1 в реверсивное вращение выходного вала используется кулисный механизм 3.
Величина частоты вращения электродвигателя 1 задается напряжением , поступающим от задающего устройства 4 на первый вход элемента 5 сравнения. Усилитель 6 усиливает этот сигнал по напряжению. Электродвигатель I вращается в одну сторону под действием напряжения Uj с выхода усилителя 6. Кулисный механизм 3 преобразует односторонее вращение электродвигателя 1 в возвратно-поступательное выходного вала с постоянным углом реверса t/p .
5
0
Дпя стабилизации частоты и) вращения кулисного механизма 3 используется нелинейная отрицательная обратная связь по скорости. Сигнал коррекции ли формируется за счет умножения сигнала с выхода датчика 7 частоты вращения на сигнал U с выхода датчика косинуса угла 8.
Сигнал коррекции равен
ли где Uc
Ur
U,U,
К
9
COS
VK.
напряжение на выходе датчика 7 скорости; напряжение на выходе датчика 8 конуса угла; коэффициент передачи датчика 7; угол поворота выходной оси
кулисного механизма 3. Таким образом, сигнал коррекции ди несет информацию не только о величине частоты вращения электродвиUK - К,
5
0
5
0
5
0
(/ кулисного
гателя 1 , но и об угле механизма 3.
Отрицательная обратная связь по скорости обеспечивает стабилизацию скорости вращения при изменении напряжения питания и момента нагрузки. Введение же в сигнал коррекции информации об угле поворота кулисного механизма позволяет стабилизировать частоту вращения выходного вала и в угле реверса if. .
Передаточная функция по скорости электропривода с кулисным Механизмом равна
U)K(g) Uvnp(p) 1 + где К - коэффициент передачи усилителя 6, электродвигателя I, передаточного механизма 2 и кулисного механизма 3; электромеханическая постоянная времени электродвигателя I .
Передаточная функция электропривода с кулисным механизмом и нелинейной обратной связью по скорости:
(p)-Wec(p) .
W.
т Wn(p)
Ki.
lIlIiiK 2COsf K
t
1 ч-1p
l+K,K2COs2c
где Wgp(p)K,cos Lf - передаточная
функция цепи обратной связи;
31
Kj - коэффициент передачи датчика 7 скорости.
Выбором коэффициентов К и К2 можно не только стабилизировать час- тоту вращения u) , но и получить различные варианты распределения сОц в угле реверса tf .
Электропривод обеспечивает стабилизацию частоты вращения выходного вала кулисного механизма как при изменении угла поворота t/ , так и при воздействии внешних возмущений путем ввода корректирующего сигнала в виде нелинейной обратной связи по скорости.
ф.ормула изобретения
Электропривод, содержащий электродвигатель, вал которого соединен
Редактор А. Шандор
Составитель Т. Рожкова
Техред Л.Сердюкова Корректор Г. Решетник
Заказ 1978/54 Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. Д/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
104
через передаточный механизм с рабочим механизмом, последовательно соединенные задающее устройство, элемент сравнения и усилитель, выход которого подключен к электродвигателю, и два счетчика обратной связи отличающийся тем, что, с целью обеспечения стабилизации частоты вращения выходного вала рабочего механизма, в него введен умножитель, первый датчик обратной связи выполнен в виде датчика частоты вращения, второй датчик обратной связи выполнен в виде датчика косинуса угла и установлен на выходе рабочего механизма, выходы обоих датчиков подключены соответственно к входам умножителя, выход которого соединен с вторым входом элемента сравнения.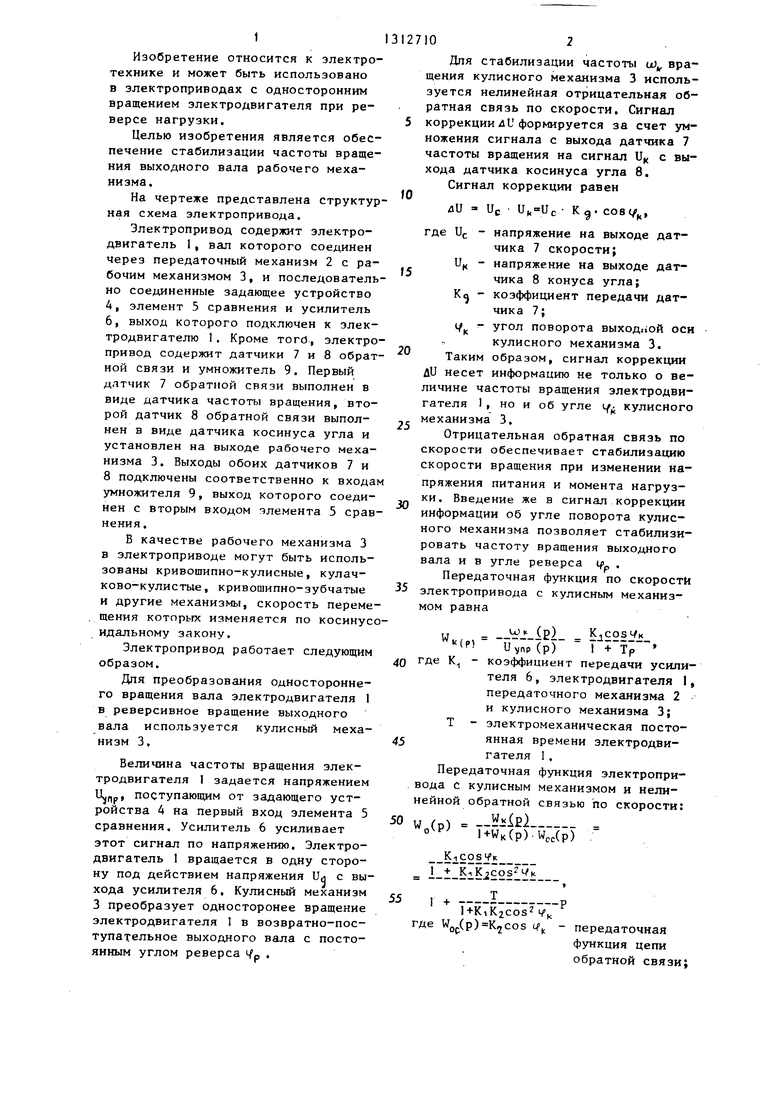
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный вентильный электропривод | 1987 |
|
SU1679597A1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU780139A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2007 |
|
RU2361355C1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
Изобретение относится к электротехнике и м.б. использовано в электроприводах с односторонним вращением электродвигателя при реверсах нагрузки. Целью изобретения является обеспечение стабилизации частоты вращения выходного вала рабочего механизма. Электропривод содержит электродвигатель 1, вал которого соединен через передаточный механизм 2 с рабочим механизмом 3. Выходы датчика 7 частоты вращения и датчика 8 косинуса угла подключены соответственно к входам умножителя 9. Для стабилизации частоты вращения рабочего механизма 3 используется нелинейная отрицательная обратная связь по скорости. Сигнал коррекции формируется умножением сигналов с выхода датчика 7 частоты вращения и датчика 8 косинуса угла, что позволяет стабилизировать частоту вращения выходного вала при изменении напряжения питания, момен та нагрузки в угле реверса рабочего механизма. 1 ил. С/)
| Тихонов А | |||
| П | |||
| Радиолокационное оборудование самолетов и его эксплуатация | |||
| - М.: Транспорт, 1980, с, 23, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Чиликин М | |||
| Г., Ключев В | |||
| И., Сандлер А | |||
| С | |||
| Теория автоматизированного электропривода | |||
| М.: Энергия, 1979, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
