Изобретение относится к электротехнике, в частности к электроприводу с широким диапазоном изменения скорости вращения двигателя, например, по управляющему сигналу.
Известны аналогичные устройства, относящиеся по принципу действия к астатическим системам регулирования скорости электродвигателя с фазовым управлением: прецизионные привода постоянного тока, прецизионные системы стабилизации скорости двигателей [1]. Недостатки их обусловлены дискретностью фазового регулятора. В области высоких частот эта дискретность мало сказывается на работе электропривода, так как электромагнитная и электромеханическая постоянные времени значительно больше интервала дискретности. Однако в области низких скоростей (0,1-1 об/мин) вал двигателя поворачивается скачкообразно, и наблюдаются сбои в работе фазорегулятора.
Наиболее близким к изобретению по технической сущности является устройство для регулирования скорости вращения электродвигателя, содержащее блок управления скоростью, входы которого подключены к линейному источнику управляющего сигнала и линейному датчику положения ротора, и блок регулирования напряжения двигателя [2].
Недостатками этого устройства являются:
1. Устройство имеет ограниченный диапазон регулирования в области низких и инфранизких частот.
2. Устройство имеет сложную систему управления.
3. Затруднен реверс.
Цель изобретения - достижение широкого диапазона регулирования и плавного вращения вала бесконтактного двигателя постоянного тока в области низких и инфранизких частот.
Это достигается тем, что линейный источник управляющего сигнала по углу заменен синусно-косинусным формирователем управляющего сигнала. Также в схему введен синусно-косинусный датчик обратной связи по углу, дополнительный синусно-косинусный формирователь опорного сигнала и два преобразователя частоты.
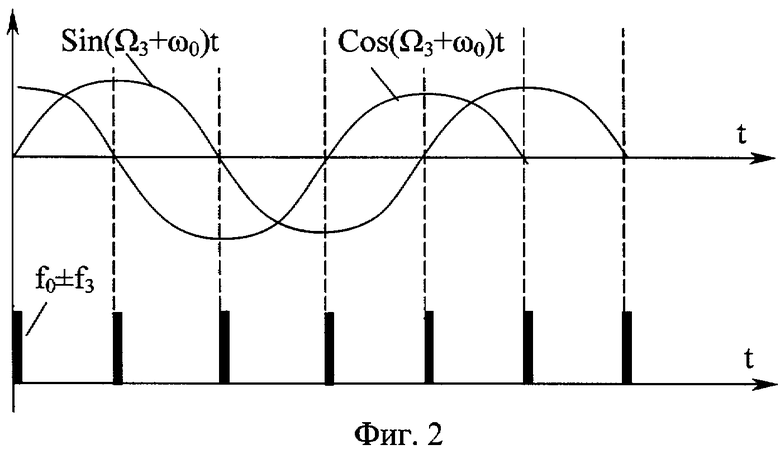
На фиг.1 приведена структурная схема устройства.
Устройство содержит: синусно-косинусный формирователь управляющего сигнала 1; синусно-косинусный формирователь опорного сигнала 2; два преобразователя частоты, состоящие из умножителей 3-6, 14-17, сумматоров 7, 8, 18, 19 и формирователей импульсов 9, 20. Также в устройство входят импульсный частотно-фазовый дискриминатор 10, регулятор скорости вращения двигателя 11, бесконтактный двигатель постоянного тока 12 и синусно-косинусный датчик положения ротора 13.
Устройство работает следующим образом.
На вход синусно-косинусного формирователя управляющего сигнала 1 подается напряжение управления Uy, являющееся заданием по скорости вращения двигателя 12. Формирователь 1 преобразует напряжение управления в два низкочастотных сигнала sin Ωзt и cos Ωзt, мгновенные значения которых являются сигналами задания по углу. Эти сигналы подаются на преобразователь частоты 3-9, где они складываются с сигналами повышенной частоты синусно-косинусного формирователя опорного сигнала 2 sinω0t и cosω0t. Суммарный сигнал повышенной частоты f0±fз поступает на опорный вход импульсного частотно-фазового дискриминатора 10. Сигналы с синусно-косинусного датчика положения ротора 13 sin Ωврt и cos Ωврt поступают на второй преобразователь частоты 14-20, где они складываются с сигналами синусно-косинусного формирователя опорного сигнала 2 повышенной частоты sinω0t и cosω0t. Суммарный сигнал повышенной частоты f0±fвр поступает на вход обратной связи импульсного частотно-фазового дискриминатора 10. Выходной сигнал импульсного частотно-фазового дискриминатора 10 поступает на регулятор частоты вращения двигателя 11.
Принцип работы преобразователей частоты основан на следующих тригонометрических выражениях:
Sin( Ω3+ω0)t=sin Ωзt·cosω0t+cos Ωзt·sinω0t;
Cos( Ω3+ω0)t=cos Ωзt·cosω0t-sin Ωзt·sinω0t.
На фиг.2 приведены диаграммы работы формирователей импульсов преобразователей частоты.
Как видно из фиг.2, на выходе преобразователя частоты формируется частота в 4 раза больше частоты сигналов Sin( Ωз+ω)t и Cos( Ωз+ω)t.
Полученная система замкнута по частоте, но коэффициент заполнения импульсов на выходе импульсного частотно-фазового дискриминатора пропорционален разности фаз входного задающего сигнала и сигнала обратной связи, то есть она является следящей системой по углу. Разность фаз отсчитывается с частотой f0±fз, то есть практически непрерывно. Система является реверсивной. Реверс двигателя осуществляется изменением чередования фаз синусно-косинусного формирователя управляющих сигналов. Разработанное устройство позволяет регулировать частоту вращения в широком диапазоне от нуля до максимальной частоты. Остановка двигателя и удержание его на заданном угле обеспечивается фиксацией значений задающего синусно-косинусного формирователя, соответствующих заданному углу. Поскольку система работает по заданию угла, сформированному синусно-косинусным формирователем управляющего сигнала, она обеспечивает плавное вращение вала двигателя во всем диапазоне регулирования. Равномерность движения зависит от коэффициента нелинейных искажений входного задающего формирователя и датчика обратной связи.
Источники информации
1. Трахтенберг P.M. Импульсные астатические системы электропривода с дискретным управлением. - М.: Энергоиздат, 1982. - 168 с.
2. Авторское свидетельство СССР №736318, кл. Н 02 Р 5/06, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКОГО МОМЕНТА УПРАВЛЯЮЩЕГО ДВИГАТЕЛЯ-МАХОВИКА | 2020 |
|
RU2736411C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2609673C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2510126C2 |
| Бесконтактный регулируемый электропривод | 1986 |
|
SU1361697A1 |
| Реверсивный вентильный электродвигатель | 1987 |
|
SU1431015A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ УПРАВЛЯЮЩЕГО ДВИГАТЕЛЯ-МАХОВИКА С КОНТРОЛЕМ ПАРАМЕТРОВ ВЫХОДНЫХ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК | 2021 |
|
RU2789698C1 |
| Бесконтактный двигатель постоянного тока | 1987 |
|
SU1684900A1 |
Изобретение относится к области электротехники и может быть использовано в электроприводах с широким диапазоном изменения скорости вращения двигателя, например, по управляющему сигналу. Техническим результатом является достижение широкого диапазона регулирования и плавного вращения вала бесконтактного двигателя постоянного тока в области низких и инфранизких частот. Устройство для регулирования частоты вращения электродвигателя содержит регулятор частоты вращения, датчик положения ротора, два умножителя, два сумматора, два формирователя импульсов, частотно-фазовый дискриминатор, синусно-косинусный формирователь опорного сигнала. 2 ил.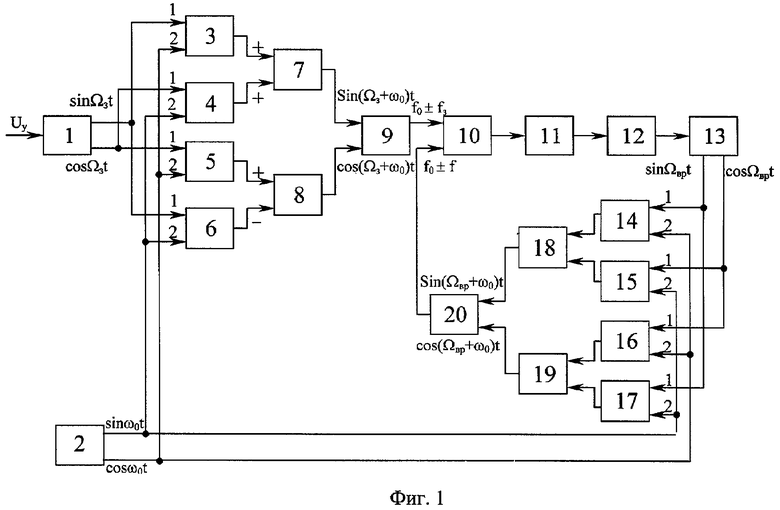
Устройство для регулирования частоты вращения бесконтактного двигателя постоянного тока, содержащее регулятор частоты вращения, датчик положения ротора, отличающееся тем, что введен синусно-косинусный формирователь управляющего сигнала, на вход которого подается напряжение управления, а выходы соединены с первыми входами первых умножителей, со вторыми входами которых соединены выходы синусно-косинусного формирователя опорной частоты, а выходы первых умножителей соединены с входами первых сумматоров, выходы которых соединены с входами первого формирователя импульсов, а его выход соединен с опорным входом импульсного частотно-фазового дискриминатора, выход которого соединен с входом регулятора частоты вращения двигателя, а выход датчика положения ротора бесконтактного электродвигателя постоянного тока соединен с входами вторых умножителей, вторые входы которых соединены с выходами синусно-косинусного формирователя опорного сигнала, а выходы соединены с входами вторых сумматоров, выходы которых соединены с входами формирователя импульсов, выход которого соединен со вторым входом импульсного частотно-фазового дискриминатора 10.
| Устройство для стабилизации скорости вращения электродвигателя | 1977 |
|
SU736318A1 |
| RU 2075152 C2, 10.03.1997 | |||
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2002 |
|
RU2218656C2 |
| Частотно-управляемый электропривод | 1985 |
|
SU1332504A1 |
| SU 18233082 A1, 23.06.1993 | |||
| Окуляр микроскопа | 1986 |
|
SU1363117A1 |
| Инвертор | 1985 |
|
SU1275715A1 |
| US 2004095089 A1, 20.05.2004 | |||
| DE 1563228 А, 19.03.1970 | |||
| ЕР 1263124 A3, 04.12.2002 | |||
| WO 9917437 A, 08.04.1999. | |||

