ромагнитной постоянной времени электродвигателя, 1 за счет введения отрицательной обратной связи по динамической составляющей тока, которая формируется с помощью модели вентильного электродвигателя, образованной блоком 14, усилителем 15
и интегратором 16. Сигнал тока модели с выхода усилителя 15 модулируется сигналами sin p, cos p, формируемыми с помощью датчика 8 и двух У 18.19, и используется для формирования сигналов коррекции. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Вентильный электропривод | 1983 |
|
SU1185523A1 |
| Способ управления вентильным электродвигателем постоянного тока | 1989 |
|
SU1757039A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Способ управления вентильным электродвигателем постоянного тока | 1989 |
|
SU1757040A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
Изобретение относится к электротехнике. Цель изобретения - упрощение электропривода при одновременном повышении надежности. С этой целью в позиционный вентильный электропривод введены умножители (У) 18,19, а блок 14 сравнения, усилитель 15 и интегратор 16 блока 11 определения тока холостого хода соединены последовательно. Первые входы У 18,19 соединены с выходами датчика 8 положения ротора и первыми входами У 12,13 блока 11. Вторые входы У 18,19 и блока 14 объединены и образуют вход для подачи сигнала управления Выходы У 18,19 подключены к одним входам усилителей 6,7 в цепях 2,3 обмотки якоря синхронного электродвигателя 1, соединенных с ними через датчики 4,5 тока. Выходы датчиков связаны с первыми входами блоков 9,10 сравнения, вторыми входами подключенных к соответствующим выходам блока 11, являющимся выходами У 12,13. Вторые входы У 12,13 соединены с выходом усилителя 15 блока 11. Изобретение обеспечивает компенсацию погрешности стабилизации скорости вращения, определяемой статической нагрузкой, за счет введения положительной обратной связи по току, а также компенсацию элект9(Л о VI о СП о VI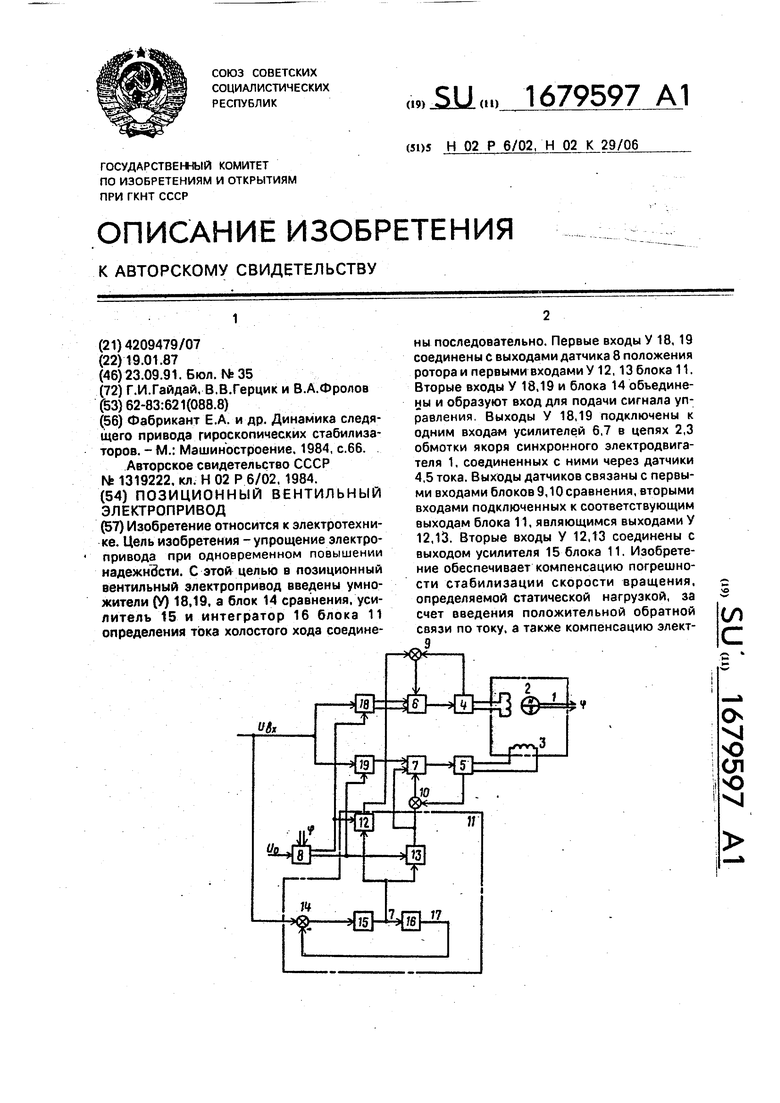
Изобретение относится к электротех- нике, в частности к автоматизированному электроприводу с вентильными электродвигателями, и может быть использовано в позиционных электроприводах регулирова- ния моментом в динамических режимах.
Цель изобретения - упрощение электропривода при одновременном повышении его надежности.
На чертеже представлена функциональ- пая схема позиционного вентильного элек- тропривода.
Позиционный вентильный электропривод содержит двухфазный синхронный электродвигатель 1, каждая фаза 2 и 3 якор- ной обмотки которого подключена через соответствующий датчик 4 и 5 тока к выходу одного из усилителей 6 и 7, датчик 8 положения ротора, установленный на его валу, два блока 9 и 10 сравнения и блок 11 определения тока холостого хода. Блок 11 определения тока холостого хода снабжен двумя умножителями 12 и 13 и последовательно соединенными блоком 14 сравнения, усилителем 15, интегратором 16. Выход 17 интег- ратора 16 подключен к первому входу блока 14 сравнения.
В электропривод введены два умножителя 18 и 19. Первые входы усилителей 6 и 7 соединены с первыми входами блоков 9 и 10 сравнения и с выходами умножителей 12 и 13. Вторые входы усилителей 6 и 7 подключены к выходам блоков 9 и 10 сравнения, третьи входы усилителей - к выходам умножителей 18 и 19. Вторые входы блоков 9 и 10 сравнения подключены к вторым выходам датчиков 4 и 5. Первые входы умножителей 18 и 19 подключены соответственно к выходам датчика 8 положения ротора и к первым входам умножителей 12 и 13, вторые входы которых соединены с выходом усилителя 15 блока 11 определения тока холостого хода. Второй вход блока 14 сравнения объединен с вторыми входами умножителей 18 и 19 и являются вторым входом электропривода для подключения задатчи- ка сигнала управления. Вход датчика положения, являющийся первым входом
электропривода, подключен к внешнему источнику опорного напряжения.
Позиционный вентильный электропривод работает следующим образом.
На вход датчика 8 положения ротора, в качестве которого могут быть использованы, например, два генератора Холла, сдвинутые в пространстве на 90 электрических градусов, подается опорное напряжение Ко. На выходе этого датчика формируются напряжения, пропорциональные синусу и косинусу угла поворота ротора р . Эти напряжения подаются на первые входы умножителей 18 и 19 соответственно, на в,о- рые входы которых поступает входное напряжение UBX устройства. На выходах умножителей 18 и 19 образуются напряжения
15 25
UYI КдУо Unxsinp, 20 (Jv2 КдУо UBXCOS p,
где Кд - коэффициент передачи датчика 8 положения ротора.
Эти напряжения усиливаются усилителями 6 и 7 и поступают на две фазы 2 и 3 якорной обмотки, выполненные в виде взаимно перпендикулярных синусоидально распределенных обмоток синхронного электродвигателя 1, магнитное поле которых, взаимодействуя с магнитным полем ротора, заставляет последний поворачиваться на угол р с частотой вращения ш ,
Для стабилизации частоты вращения электродвигателя 1 при изменении статической нагрузки на валу электродвигателя 1 повышается жесткость механических характеристик вентильного электродвигателя путем подачи на третьи входы усилителей 6 и 7 корректирующих сигналов в виде напряжений UKI и UK2- Напряжения L/KI и UKZ формируются путем сравнения в блоках 9 и 10 сравнения реальных токов И и iz электродвигателя, которые замеряются датчиками 4 и 5 токов, и сигналов IY-I. и 1у2, получаемых на выходах умножителей 12 и 13 блока 11.
ivi;
IV2Сигналы IYI и формируютсяблоком 11 определения тока холостого хода электродвигателя:
IYI КдКо I sin (p
IY2 КдУо I cos р )
где I - ток модели вентильного электропривода.
Поскольку вентильный электродвига- тель обладает линейными механическими и регулировочными характеристиками, подобная характеристикам электродвигателя постоянного тока, то вентильный электродвигатель достаточно точно описывается передаточной функцией электродвигателя постоянного тока:
Кдв
20
rc-CT.P + iffr.P + iv
где Кдв - коэффициент передачи электродвигателя;
Тэ - электромагнитная постоянная вре- „с мени электродвигателя;
Тм - электромеханическая постоянная времени электродвигателя.
Причем электромагнитную постоянную времени Тэ можно не учитывать, поскольку „ в данном устройстве компенсация Тэ осуществляется введением отрицательной обратной связи по динамической составляющей тока (сигналы IY-I и iya)- Сигналы IYI и Iv2 заводятся на вторые входы усилителей 6 и 35 7. Отрицательная обратная связь по току обеспечивает демпфирование токового контура и уменьшение Тэ, что и позволяет ее не уситывать.
Последовательно соединенные блок 14 о сравнения, усилитель 15 и интегратор 16 образуют модель вентильного электродвигателя. На второй вход блока 14 сравнения подается входной сигнал UBx.
На выходе усилителя 15 модели форми- .,. руется сигнал тока I модели, который является, по существу, динамической составляющей тока двигателя, которая приводится в соответствие с двухканальной структурой вентильного электропривода gQ путем модулирования сигнала I сигналами sin р и cos p с помощью умножителей 12 и 13.
При работе вентильного электропривода на холостом ходу токи электродвигателя §§ И и г совпадают с сигналами YI и Iv2- При появлении нагрузки на валу электродвигателя токи И и г возрастают пропорционально величине внешнего момента. Токи И и г электродвигателя и сигналы IYI и iY2
5
0
с
5
о
,. Q
§
поступают на блоки 9 и 10 сравнения, выходные сигналы которых представляют собой сигналы коррекции UKI и 1)к2- Последние поступают на третьи входы усилителей 6 и 7 (положительная обратная связь), увеличивая напряжение на выходах этих усилителей и соответственно напряжения на фазах 2 и 3 обмотки якоря синхронного электродвигателя 1. Частота вращения электродвигателя возрастает, жесткость механических характеристик его увеличивается.
В результате указанного выполнения блока 11 определения тока холостого хода 11 и его связей с элементами электропривода достигается значительное упрощение устройства, так как вентильный электропривод при технической реализации содержит меньше элементов, имеет большую надежность. При этом обеспечивается высокая точность стабилизации частоты вращения в случае изменения статической нагрузки на валу электродвигателя.
Дополнительным преимуществом электропривода является отсутствие делителей, требующих в окрестности нулевых сигналов дополнительной подстройки, что снижает эксплуатационные характеристики устройства.
Формула изобретения Позиционный вентильный электропривод, содержащий двухфазный синхронный электродвигатель, датчик положения ротора, установленный на валу ротора, вход указанного датчика образует первый вход электропривода, два усилителя, два блока сравнения, два датчика тока и блок определения тока холостого хода, снабженный двумя умножителями, усилителем, интегратором и блоком сравнения, каждая фаза якорной обмотки синхронного электродвигателя подключена через соответствующий датчик тока к выходу одного из усилителей, первый вход каждого усилителя соединен с соответствующим выходом блока определения тока холостого хода и с первым входом одного из блоков сравнения, второй вход каждого усилителя подключен к выходу соответствующего блока сравнения, вторые входы блоков сравнения подключены к вторым выходам датчиков тока соответственно, отличающийся тем, что, с целью упрощения при одновременном повышении надежности, введены два умножителя, первый вход каждого из которых соединен с соответствующим выходом датчика положения ротора и первым входом одного из умножителей блока определения тока холостого хода, выход каждого из которых подключен к третьему входу соответствующего усилителя, блок сравнения, усилитель и интегратор блока определения тока холостого хода соединены последовательно, выход интегратора подключен к входу блока сравнения блока определения тока холостого хода, выход усилителя упомянутого блока подключен к вторым входам умножителей блока определения тока холостого хода, выходы которых являются выходами этого блока, а вторые входы введенных умножителей объединены с вторым входом блока сравнения блока определения тока холостого хода, образуя второй вход электропривода.
| Фабрикант Е.А | |||
| и др | |||
| Динамика следящего привода гироскопических стабилизаторов | |||
| -М.: Машиностроение | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Авторское свидетельство СССР ISfe 1319222, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
