На добычных и вскрышных машинах с шагаюшим ходом применяются эксцентриковые и гидравлические механизмы шагания.
Особенность предлагаемого механизма шагания заключается в том, что он обеспечивает реверси.вное передвижение машины без дополнительных разворотов и без «клевков.
На фиг. 1, 2 и 3 изображены соответственно предлагаемый механизм шагания, его узлы и схема перемеш ения машины. ,
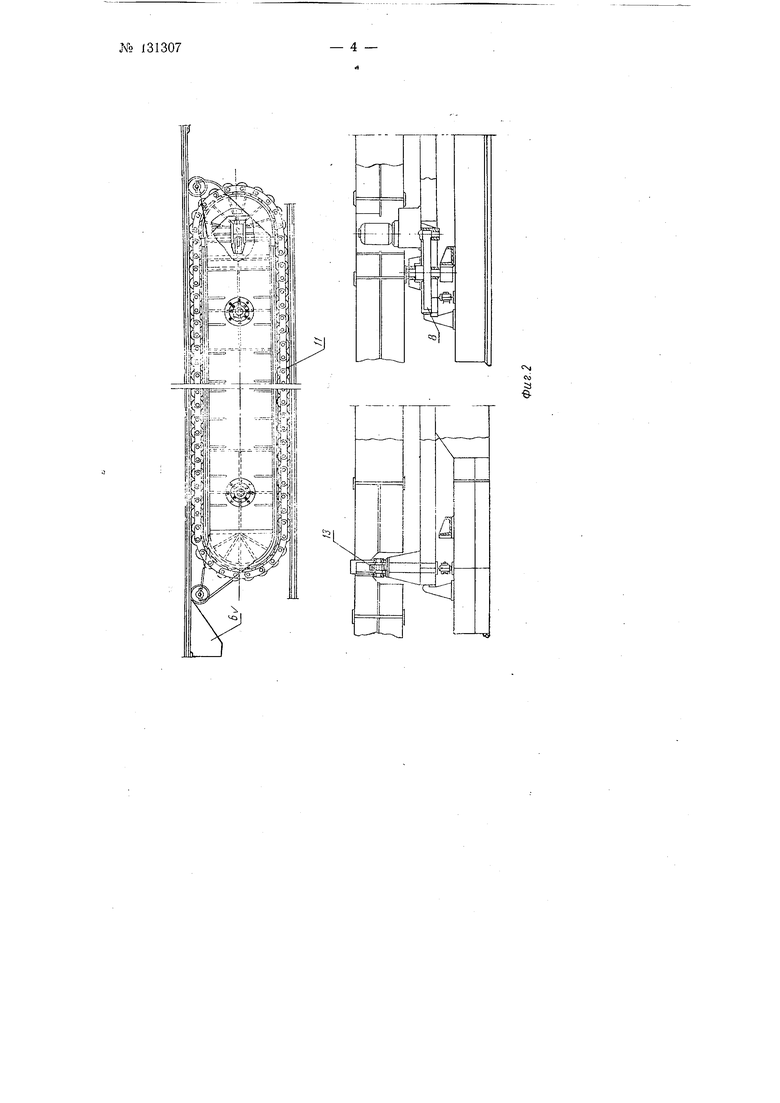
Конструкция предлагаемого реверсивного механизма шагания представляет собой сочетание верхней платформы 1, промежуточной платформы 2 и круглой опорной рамы 3. Верхняя и промежуточная платформы, сидяшие на центральной цапфе 4 опорной рамы, размеш,аются в корпусе машины. Между верхней и промежуточной платформами размеш,ены на шарнирах четыре гидравлических цилиндра 5, с помош,ью которых производится подъем верхней платформы с корпусом машины относительно промежуточной платформы с опорной рамой и наоборот.
Верхняя платформа имеет специальные упоры 6, регулируюшие по.тожение платформы в горизонтальной и вертикальной плоскостях. Фиксация положения промежуточной платформы относительно центральной цапфы опорной рамы в горизонтальной плоскости производится с помошью трех центрируюших устройств 7. На промежзточной платформе установлен привод поворота машины 8. Вращение от редуктора привода поворота передается на зубчатый венец 9 и роликовый круг 10, расположенные на опорной раме. На верхней платформе расположены две бесконечные роликовые цепи 11 и четыре гидродомкрата 12 для пе№ 131307- 2 -
ремещения корпуса машины «вперед или «назад по роликам цепи. Гидроцилиндры перемещения размещены между верхней платформой и корпусом мащины.
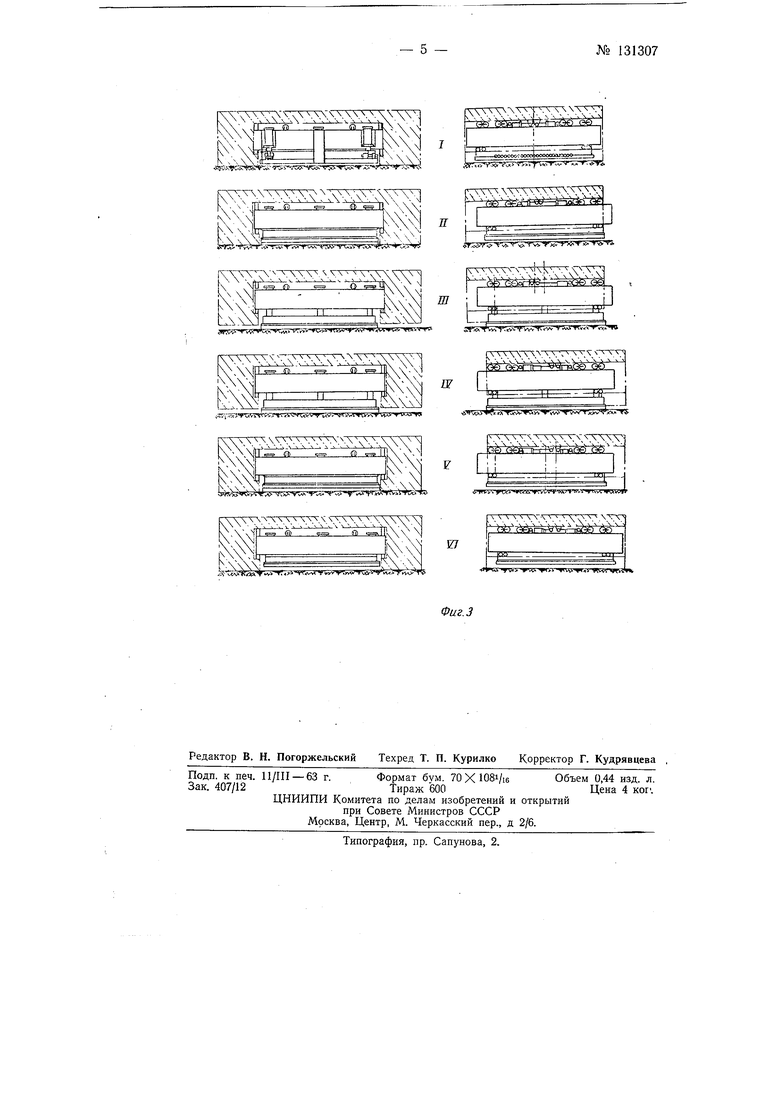
Процесс перемещения машины начинается в положении /, соответствующем рабочему положению машины, при котором она стоит на опорах своего корпуса.
При стягивании поршней левых и выдвижении порашей правых цилиндров перемещения (положение //) происходит перемещение верхней и промежуточной платформ относительно корпуса машины на заданный шаг «вперед по роликовой цепи (при этом происходит вращение каждого ролика .вокруг своей оси и перемещение всей цепи с роликами по своей направляющей).
При выдвижении поршней цилиндров подъема происходит опускание опорной рамы (положение ///) и при опирании ее на грунт - подъем опор корпуса машины. После этого выдвижением поршней левых и втягиванием поршней правых цилиндров перемещения корпус машины перемешается на расстояние двойного шага «вперед по роликовой цепи (положение IV). Перемещение роликовой цепи в данном случае становится возможным благодаря заданному зазору, образующемуся между роликами нижней ветви цепи и направляющей, укрепленной на корпусе машины.
Втягиванием поршней цилиндров подъема опускают корпус машины и при опирании опор корпуса на грунт происходит подъем опорной рамы (положение У).
Затем цилиндрами перемещения верхнюю и промежуточную платформы перемещают «вперед на величину шага (положение V7) и устанавливают машину в рабочее положение. Передвижение в направлении «назад производится в обратном порядке. Поворот машины может производиться только при установке машины на опорную раму (положения /// и IV) и поднятом корпусе машины. Передача усилий с промежуточной платформы на верхнюю при повороте машины производится с помощью поводков 13. Опорная рама и промежуточная платформы связаны между собой в вертикальной плоскости захватами 14.
Предмет изобретения
Реверсивный механизм шагания для добычных и вскрышных машин, применяемых на открытых разработках полезных ископаемых, содержащий верхнюю и промежуточную платформы, опорную раму, приводы и роликовый круг для поворота машины, отличающийся тем, что, с целью осуществления плавного реверсивного передвижения машины без дополнительных разворотов, в нем применены четыре гидродомкрата и две бесконечные роликовые цепи для перемещения машины «вперед и «назад и четыре гидроцилиндра для поочередного подъема верхней платформы с корпусом машины или промежуточной платформы с опорной рамой.
CNl
Cvj
5j ©.
К .:cgt :z zu I 1удх:з
-53v-J:VCSH(KfS- ,tgr-ySi f vKxyg /.;. f .v--nS
Л Ж - M p-j-::
V и;.ЯГчУНУучХ 4 J j«Tx /s V
ЧЛХ VA
g lIlfcSJat:
vV П
: - -. -- -ЛЧчЧч
ZZ7 ;
y л ч ЛЛ .V -. (У оГТгУ оё GO
ZF
(Й)c ;iifb
Lwi. kvV F« T« vVTiwfr5i rtx tH
A4viA TV«IA yo V -TiS PxVi W (-.VX4 T
vv
11
47eC TWvr4rt vr4 ETffltT
bgr Hrioi-nrV tos- iafefci rtfT
| название | год | авторы | номер документа |
|---|---|---|---|
| ОЧИСТНОЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА | 2006 |
|
RU2323339C2 |
| ВЫНОСНАЯ ОПОРА ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2361806C1 |
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Проходческий щит | 1987 |
|
SU1550158A1 |
| МЕХАНИЗИРОВАННЫЙ ЩИТОВОЙ КОМПЛЕКС ДЛЯ СООРУЖЕНИЯ ТОННЕЛЕЙ СО СБОРНОЙ ОБЖАТОЙ В ПОРОДУ ОБДЕЛКОЙ | 1988 |
|
RU2018677C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2514059C2 |
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2482277C1 |
| Выемочное оборудование для подземной горной разработки, в частности, калийных солей | 1989 |
|
SU1834974A3 |