Изобретение относится к области наземной военной техники, а именно, к быстроходным военным гусеничным машинам (ВГМ) повышенной проходимости на слабых грунтах (глубокий снег и заболоченные основания) для труднопроходимых районов Крайнего Севера и Сибири.
Известен транспортер-снегоболотоход среднего весового класса «ГТ-СМ» (В.Ф. Платонов «Гусеничные транспортеры-тягачи», Москва, «Машиностроение», 1978 г., стр. 119-133), содержащий цельнометаллический сварной герметичный корпус, включающий в себя кабину, моторное отделение и платформу. Кабина расположена в передней части корпуса, моторное отделение - в средней, грузовая платформа - в задней части. Ходовая часть содержит гусеничный движитель, переднее ведущее колесо, шесть опорных катков. Гусеничная цепь симметричная. Повышенная проходимость обеспечивается тем, что опорная поверхность гусеницы по возможности развита. Траки выполнены тонкостенными, плоскими с сильно развитыми грунтозацепами, как следствие, хорошие сцепные качества движителя со снегом. Подвеска транспортера торсионная с гидравлическими телескопическими амортизаторами на крайних катках. Гусеница транспортера выполнена с открытыми шарнирами. Среднее удельное давление на грунт - 0,17 кг/см2(0,017 МПа). Масса снаряженного транспортера - 3,75 т.
Недостатками данного транспортера является:
- сильно развитые грунтозацепы траков могут повреждать поверхностный растительный покров заболоченного основания, особенно при выполнении поворотов;
- открытые механические шарниры гусеничного движителя подвержены сильному износу;
- отсутствие поддерживающих катков под верхним обводом гусеничной ветви требует повышенного внимания на контроль натяжения гусеничной цепи, что может приводить к ее сбросу при выполнении поворотов и в процессе подтормаживания на повышенных скоростях движения машины.
Известно устройство увеличения опорной проходимости военной гусеничной машины (патент RU 157912 U1 от 25.04.2014), представляющее собой дополнительные опорные катки с гусеницами, закрепленные к опорным каткам гусеничной машины с возможностью передвижения вместе с основной ходовой частью, передвигая корпус гусеничной машины по грунту.
Недостатками данного устройства является:
- одностороннее увеличение ширины звеньев в ходовой части (установка дополнительных ведущего колеса, направляющего колеса, опорных катков) приводит к перекосам этих звеньев, увеличивает нагрузки на основные узлы ходовой части, уменьшая запас прочности и снижение средней скорости движения;
- увеличение числа крепежных деталей и мест состыковок в ходовой части усложняет техническое обслуживание машины.
Известен способ повышения проходимости движителя военной техники (патент RU 2536267 С1 от 08.07.2013) - шагающий движитель тяжелого ракетного вооружения, состоящий из корпуса с рамой грузовой платформы на центральной секции-понтоне и боковых опорных секций-понтонов. Опорная поверхность секций-понтонов в сборе выполнена полусферической с радиусом Rсф. Площадь опорной полусферической поверхности центральной секции-понтона выполнена соизмеримой по площади с опорной поверхностью обеих боковых секций-понтонов. Грузовая рама платформы центральной секции-понтона снизу выполнена по всей ширине движителя с вращающимися снизу роликами, упирающимися в крышу боковых секций-понтонов. Шагающий движитель преодолевает слабые грунтовые и заболоченные основания путем поочередного горизонтального поступательного перемещения одной части опорной поверхности секций-понтонов относительно другой. Перемещение обеспечивается с помощью механизма шагового перемещения штоков обоих силовых гидроцилиндров боковых секций-понтонов на продольных направляющих и роликах. При этом происходит расторможивание на полусферической опорной поверхности опорных катков и торможение ряда опорных катков неподвижной центральной секции-понтоне. Далее ряды опорных катков центральной секции-понтона растормаживают, а ряды опорных катков в боковых секций-понтонах тормозят от продольного перемещения, центральную секцию-понтон поступательно перемещают относительно стоящих на месте боковых секций-понтонов.
Недостатками данного способа является:
- шагающий движитель с поочередностью поступательных перемещений в горизонтальной плоскости опорных поверхностей относится к механизму прерывистого однонаправленного движения, и как следствие, скорость такого перемещения незначительна;
- продольные направляющие и поверхность крыши боковых секций-понтонов перед роликами, установленные снизу грузовой платформы, не оборудованы элементами очистки поверхностей от налипаний.
Наиболее близким по совокупности существенных признаков к предлагаемому изобретению является военная гусеничная машина, а именно, самоходная артиллерийская установка 152 мм гаубица 2С19 «Мста-С» (Г.Л. Холявский «Энциклопедия бронетехники гусеничных боевых машин 1919-2000 г.», «Харвест», 2001 г., стр. 199-204), содержащая тонкобронный корпус, который включает отделение управления движением, боевое отделение основного вооружения, герметизированное моторно-трансмиссионное отделение, расположенное в кормовой части корпуса. Среднее удельное давление на грунт - 0,8 кг/см2 (0,08 МПа). Скорость по шоссе 60 км/час, преодоление препятствий: глубина брода 1,5 м. На нижнем лобовом листе передней части корпуса установлена система самоокапывания в виде бульдозерного оборудования, режущий инструмент которого переводят из транспортного положения в рабочее вручную. Ходовая часть гаубицы содержит симметричную гусеничную цепь, выполненную из сочлененных траков с параллельным шарниром. Для преодоления заболоченных оснований на кормовой части корпуса расположено деревянное бревно, закрепленное в двух кронштейнах. В ЗИЛе машины уложены тросовые сцепки для крепления бревна к гусеничным движителям. Перестановка бревна и его крепление осуществляется вручную. Недостатком ВГМ является:
- высокое среднее удельное давление на грунт, как следствие, низкая проходимость на слабых грунтах;
- для крепления бревна члены экипажа вынуждены покидать машину и применять мускульную энергию.
Задачей, на решение которой направлено предлагаемое изобретение, является создание военной гусеничной машины с повышенной проходимостью на слабых грунтах на большой скорости в труднопроходимых районах Крайнего Севера и Сибири без увеличения габаритов машины.
Решение поставленной задачи заключается в том, что на корпус военной гусеничной машины, содержащей тонкобронный корпус, включающий отделение управления движением, боевое отделение с основным вооружением, герметизированное моторно-трансмиссионное отделение, ходовую часть в виде гусеничных движителей с подвеской, установлено накладное съемное комплексное устройство с развитой опорной поверхностью, составленное из четырех отдельных добавочных движителей с независимой подвеской. Накладное съемное комплексное устройство имеет силовой привод перевода добавочных движителей из транспортного положения в рабочее. Управление переводом дистанционно и происходит из отделения управления движением и с избирательностью самого перевода. Это устройство выполнено так, что корпус каждого представляет собой составную конструкцию лыжи с загнутыми краями и образует форму герметизированного пустотелого понтона. Установка на корпус выполнена с помощью накладной сопряженной рычажной системы, расположенной на краях лыжи. Силовой привод перевода добавочных движителей из транспортного положения в рабочее выполнен с помощью гидроцилиндров, питаемых от независимой гидросистемы. Сами добавочные движители по принципу работы разделены так, что два добавочных движителя выполняют скольжение, а два других выполняют шагание. При этом, для двух последних в кинематическую цепь рычажной системы и гидроцилиндра установлен направляющий механизм выполнения шагания с силовым приводом в виде поворотного гидродвигителя для шагания вперед или назад. На траки гусеничных движителей с обеих сторон установлены с возможностью демонтажа дополнительные уширители опорной поверхности.
Подвеска добавочных движителей составлена из пружинно-рычажных элементов с продольным качанием рычагов, шарнирно связанных между собой и поджаты пружиной сжатия, установленной с помощью подвижного стержня и траверсы.
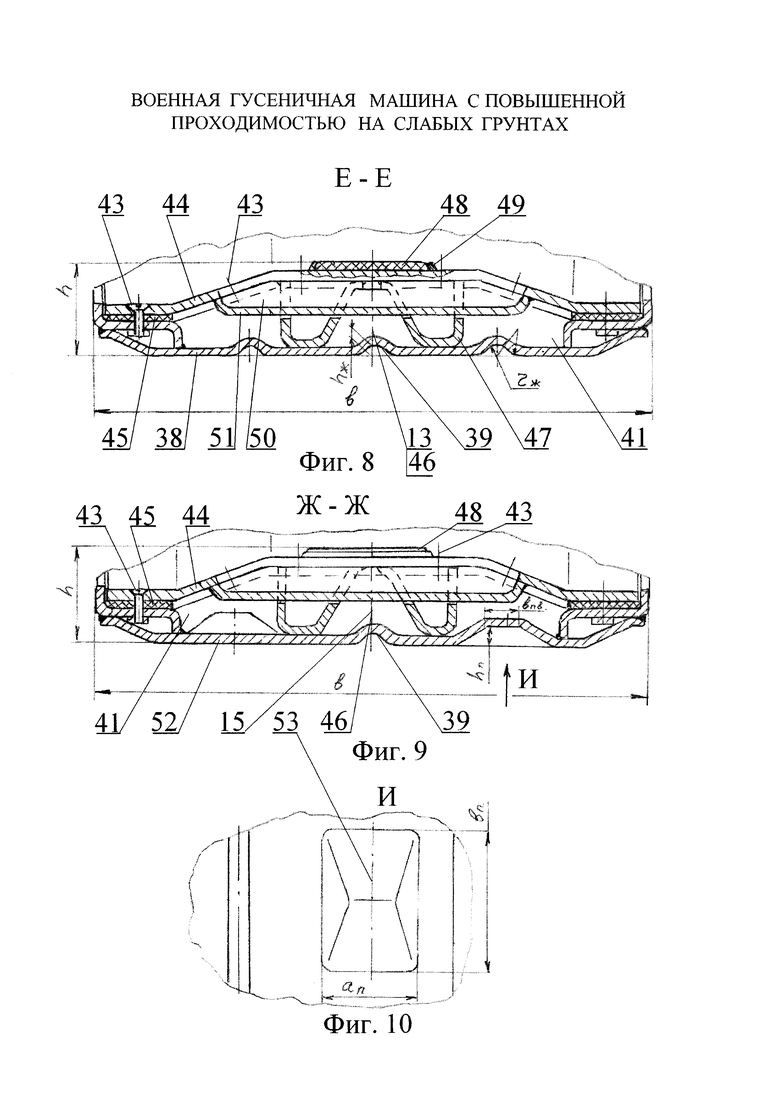
Кроме этого, нижняя поверхность двух добавочных движителей, выполняющих скольжение, выполнена с тремя продольными углублениями на каждый движитель, а нижняя поверхность двух других движителей, выполняющих шагание, выполнена с одним продольным углублением и двадцатью углублениями-протекторами в виде прямоугольных пирамид с прямолинейной вершиной на каждый движитель.
Сущность предложенного технического решения поясняется чертежами, где:
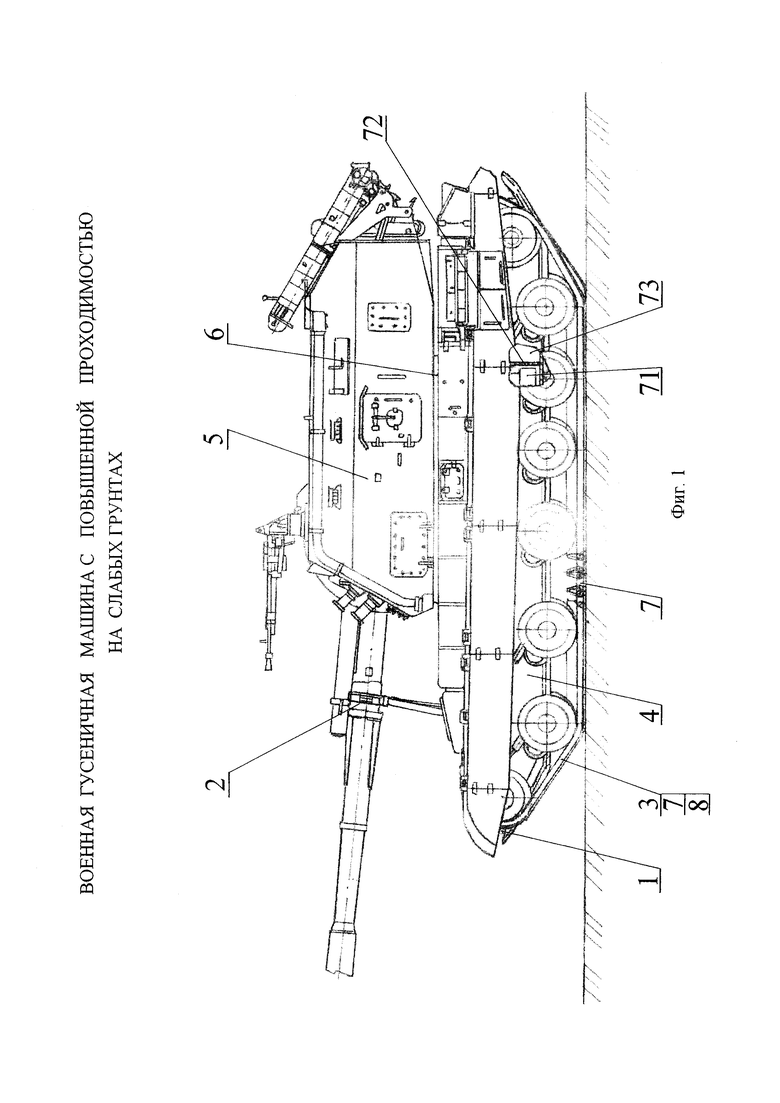
Фиг. 1 - общий вид быстроходной ВГМ с повышенной проходимостью на слабых грунтах, вид слева;
Фиг. 2 - общий вид быстроходной ВГМ с повышенной проходимостью на слабых грунтах, вид спереди;
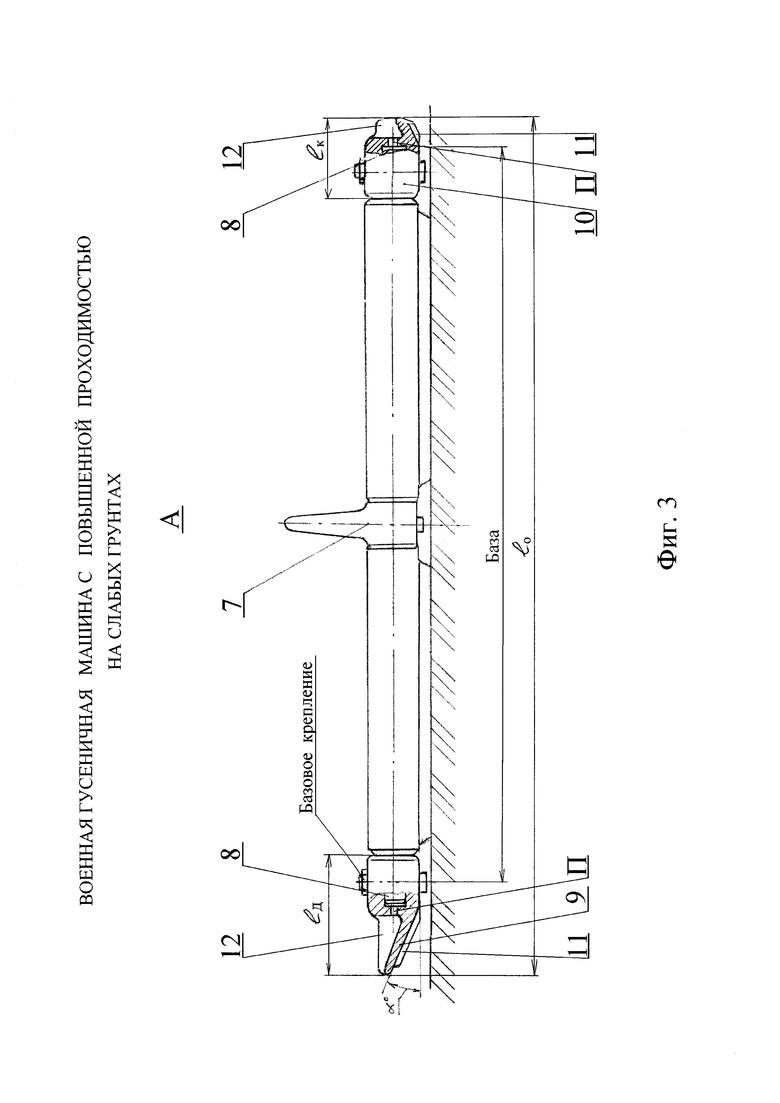
Фиг. 3 - общий вид гусеничного трака со съемными дополнительными уширителями;
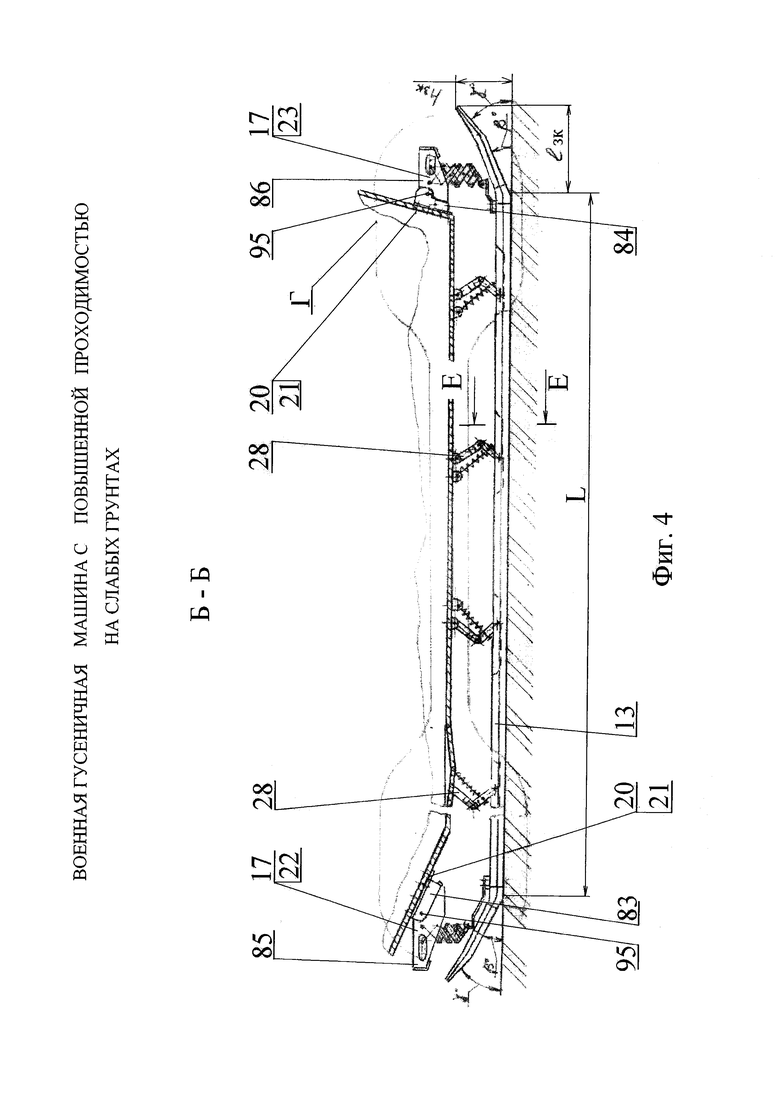
Фиг. 4 - общий вид добавочных движителей, поз. 13, разрез Б-Б, рабочее положение;
Фиг.5 - общий вид добавочных движителей, поз. 15, разрез В-В, рабочее положение;
Фиг. 6 - общий вид подвески с силовым приводом добавочных движителей, поз. 13, место Г;
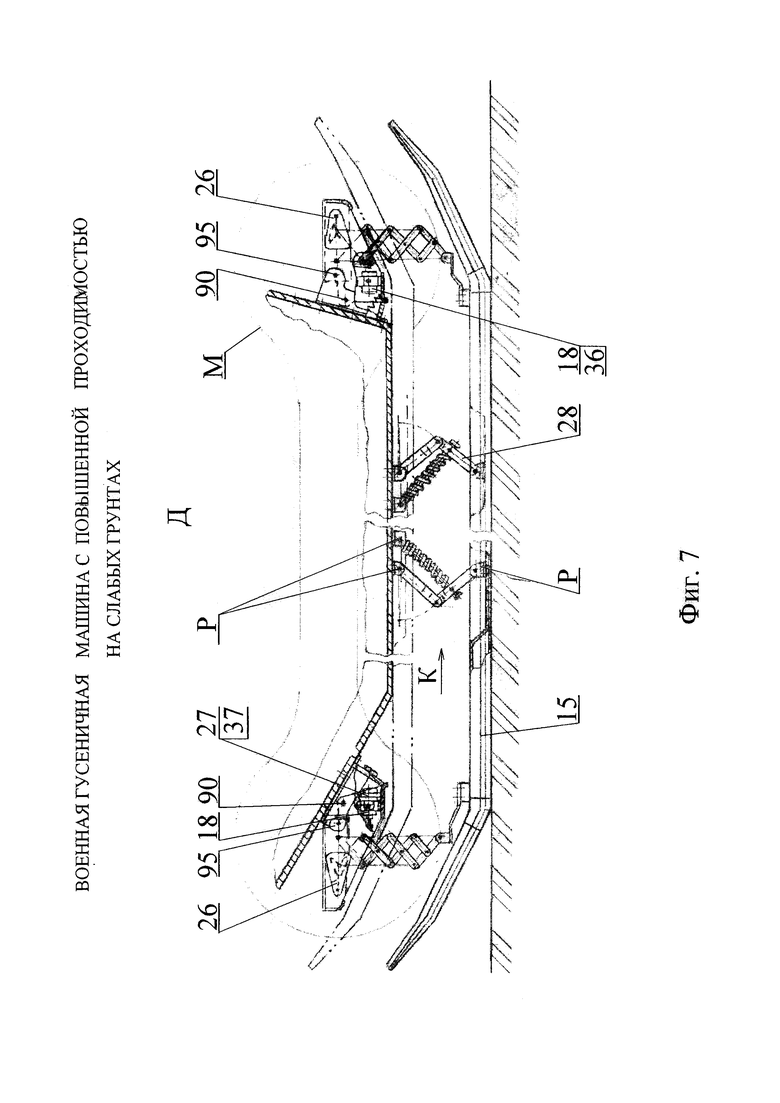
Фиг. 7 - общий вид подвески с силовым приводом добавочных движителей, поз. 15, место Д;
Фиг. 8 - поперечный разрез добавочного движителя, поз. 13, разрез Е-Е;
Фиг. 9 - поперечный разрез добавочного движителя, поз. 15, разрез Ж-Ж;
Фиг. 10 - углубление - протектор на нижней опорной поверхности, вид И;
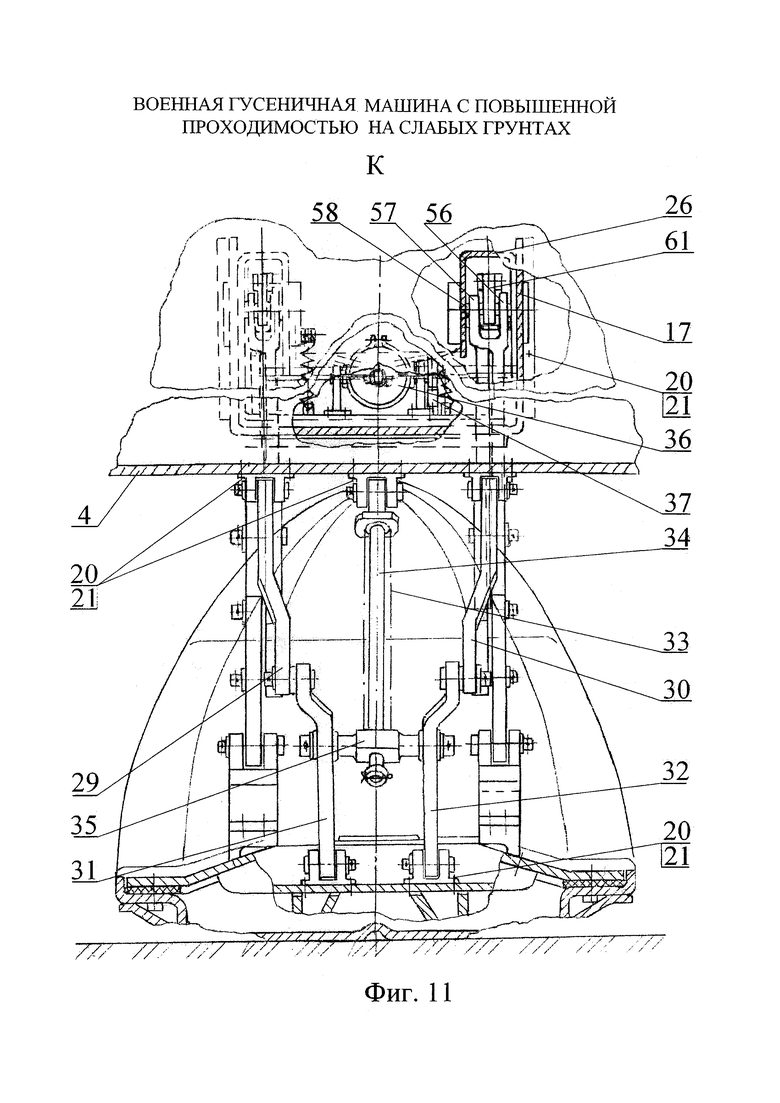
Фиг. 11 - узел подвески, вид К;
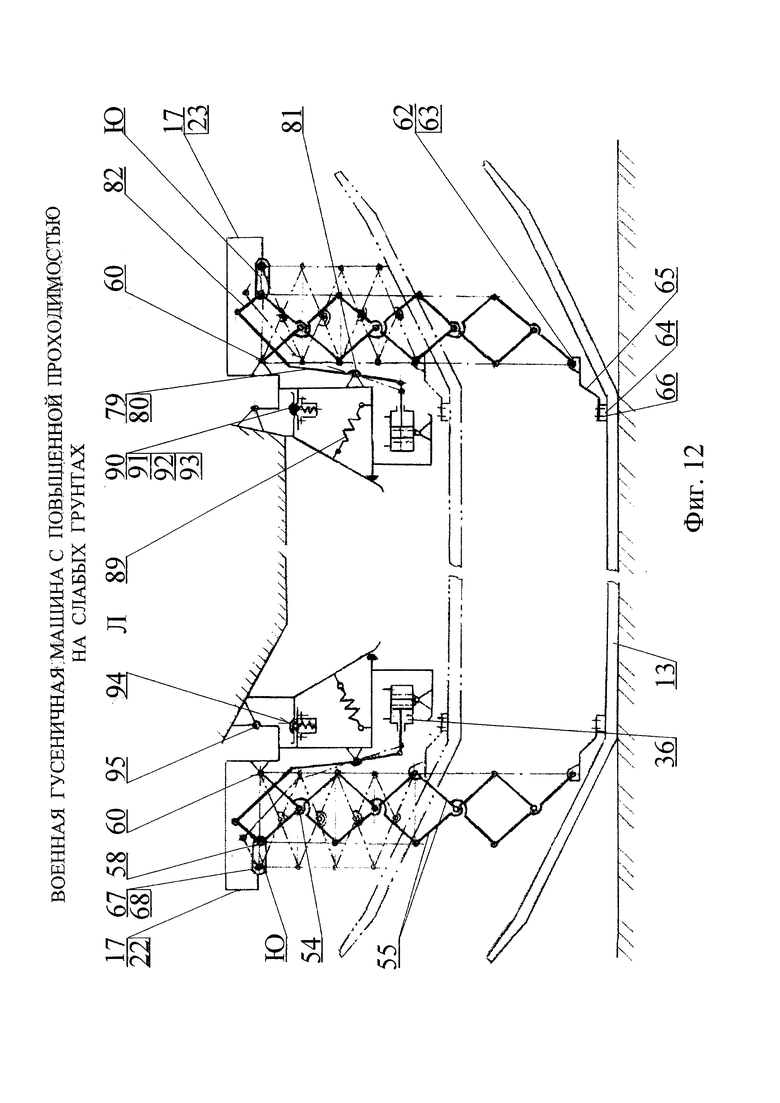
Фиг. 12- кинематическая схема силового привода добавочного движителя, поз. 13, место Л;
Фиг. 13 - кинематическая схема силового привода добавочного движителя, поз. 15, место М;
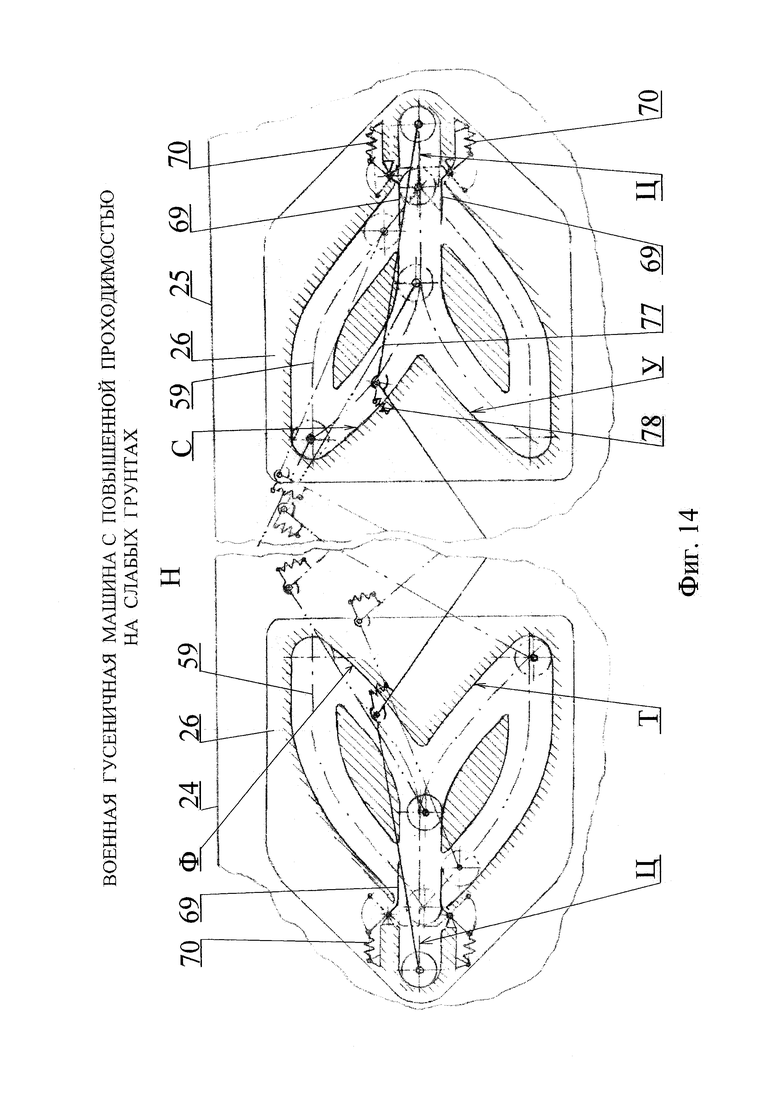
Фиг. 14 - кинематическая схема направляющего механизма шагания, место Н.
Военная гусеничная машина с повышенной проходимостью на слабых грунтах 1 в виде самоходной артиллерийской установки 2 (фиг. 1-14) с гусеничным движителем 3, содержащая тонкобронный корпус 4, боевое отделение с основным вооружением 5 на опорно-поворотном устройстве 6. Нижняя часть корпуса 4 расположена между двумя гусеничными движителями 3, включающими траки 7 с параллельным шарниром. Траки сочленены шарнирными стержнями 8 в замкнутую цепь. На траки с обеих сторон в местах их сочленения установлены с возможностью демонтажа дополнительные уширители опорной поверхности 9, 10. Конструктивно уширители по своей длине выполнены двух величин так, что длина уширителя 9 составляет Lд=90 мм (с учетом базовой длины крепления 40 мм), а длина уширителя 10 составляет Lк=60 мм (с учетом базовой длины крепления 40 мм). Крепление уширителей на стержнях 8 выполнено с помощью базового резьбового крепления. Ширина опорной поверхности дополнительных уширителей 9, 10 соразмерна ширине базовой втулки, стягивающей шарнирные стержни 8. Нижняя поверхность уширителя расположена под углом к горизонтальной плоскости α°=20-25°, что исключает срезание грунта при выполнении машиной поворота. Кроме этого, на этой поверхности установлен грунтозацеп 11, расположенный на продольной оси уширителя. На верхней поверхности уширителя установлено ребро жесткости 12, расположенное на продольной оси уширителя. На торце втулочной части уширителя выполнено отверстие «П» для визуального контроля при сборке трака 7. В результате ширина опорной поверхности каждого гусеничного движителя 3 увеличена и составляет Lо=650 мм. При установке собранной гусеничной цепи на ходовую часть шасси уширители 9 должны быть снаружи, сохраняя габаритную ширину самоходной гаубицы 2, а уширители 10 должны располагаться около бортов корпуса 4.
На продольную нижнюю часть по всей ширине корпуса 4 установлено накладное съемное комплексное устройство с развитой опорной поверхностью в виде четырех отдельных добавочных движителей 13, 14, 15, 16. Их установка на корпус 4 осуществляется с помощью накладной сопряженной рычажной системы 17, кинематически связанной с силовым приводом 18 для дистанционно и избирательного перевода этих движителей из транспортного положения в рабочее. Дистанционное управление выполняется из отделения управления движением 19. При этом, система 17 в количестве двух штук установлена на каждый добавочный движитель 13, 14, 15, 16 на его продольной длине так, что одна система 17 закреплена к наклонному листу передней части корпуса 4 с помощью болтов 20 и стопорных шайб 21, а другая закреплена к наклонному листу кормовой части этого корпуса болтами 20 и стопорными шайбами 21.
Кроме этого, система 17, в зависимости от принципа действия в работе (скольжения или шагания) и места крепления к корпусу 4, образована из четырех сборочных единиц 22, 23, 24, 25, из которых для движителей 13, 14, действующих по принципу скольжения в передней части корпуса 4 установлены сборочные единицы 22, а в кормовой части установлены сборочные единицы 23. Для движителей 15, 16, действующих по принципу шагания, в передней части корпуса установлены сборочные единицы 24, а в кормовой части установлены сборочные единицы 25. Силовой привод 18 установлен в каждой сборочной единице 22, 23, 24, 25. В сборочных единицах 24, 25 в кинематическую цепь привода 18 установлен направляющий механизм 26 с силовым приводом 27 для воспроизведения шагания движителям 15, 16 вперед или назад. Кроме накладной сопряженной рычажной системы 17 на продольную нижнюю часть днища корпуса 4 установлены элементы подвески 28 с шарнирной подвижностью за счет элементов «Р», закрепленные как к корпусу 4, так и к добавочным движителям 13, 14, 15, 16 с помощью болтов 20 и стопорных шайб 21. Установленные элементы подвески 28 образуют независимую подвеску, составленную из пружинно-рычажных элементов с продольным качанием рычагов 29, 30, 31, 32, шарнирно связанных между собой. При этом, рычаги 31, 32 поджаты пружиной сжатия 33, установленной на подвижном стержне 34 с помощью траверсы 35. На каждом добавочном движителе 13, 14, 15, 16 установлено по четыре подвески 28 так, что качание двух передних происходит в сторону передней части корпуса 4, а качание двух задних происходит в сторону кормовой части корпуса 4.
Силовой привод 18 выполнен с помощью гидроцилиндра 36, а силовой привод 27 шагания выполнен с помощью поворотного гидродвигателя 37, который поворачивает продольную ось гидроцилиндра 36 и управляет направляющим механизмом 26, обеспечивая воспроизведение шагания на движение как вперед, так и назад. Добавочные движители 13, 14 содержат каждый составную конструкцию в виде лыжи. Нижняя часть 38 выполнена с загнутыми краями. При этом, на продольной оси ее плоской поверхности выполнено продольное углубление 39 (плоскодонный желоб), повышающее устойчивость прямолинейного движения (скольжение) и исключающее срезание заболоченного основания при выполнении поворота ВГМ 2. По обе стороны от продольной оси на плоской нижней части 38 выполнены еще по одному углублению. Общее количество плоскодонных желобов 39 составляет 3 шт. Кроме этого, концы продольной длины загнуты двойным гибом для преодолевания препятствия высотой до 0,5 м. Первый угол β°=25° и второй γ°=40°. Конструктивно каждый конец продольной длины составной. Нижняя часть 40 и нижняя часть 38 состыкованы между собой сваркой с помощью стойки 41. Верхняя часть 42 соединена с нижней частью 40 с помощью винтов с потайной головкой 43. Верхняя часть 44, герметизирующая нижнюю часть 38 с помощью прокладки 45 и винтов 43, выполнена продольным коробом-крышкой, образуя в совокупности с нижней частью 38 своеобразный пустотелый понтон 46. При этом, на внутренней поверхности короба-крышки 44 на ее продольной оси установлена промежуточная стойка 47, позволяющая сохранять жесткость пустотелого понтона 46. На наружной поверхности части 44 на ее продольной оси установлен амортизатор в виде резиновой прокладки 48 с дополнительным креплением по краям с помощью скобяной стойки 49. Кроме этого, на верхней части 44 выполнены углубления 50 с помощью листовой пластины 51 под размещение элементов подвески 28.
Как вариант исполнения, с учетом среды эксплуатации машины и получения минимальной массы накладного комплексного устройства добавочного движителя 13, 14, 15, 16 нижняя часть 38, 40 выполнена из листового титана, верхняя часть 42, 44 выполнена из алюминиевого сплава.
В результате габаритные размеры добавочных движителей с развитой опорной поверхностью 13, 14 следующие:
ширина В=480 мм;
длина L (колея)=6034 мм;
длина загнутого конца  ;
;
высота hзк=430 мм;
высота продольной длины h=86 мм;
высота плоскодонного желоба hж=15 мм;
радиус плоскодонного желоба rж=10 мм.
Добавочные движители с развитой опорной поверхностью 15, 16 по исполнению однотипны с движителями 13, 14, но нижняя часть 52 по сравнению с нижней частью 38 выполнена иначе, а именно: на продольной оси плоской поверхности выполнено углубление 39 (плоскодонный желоб). По обе стороны от продольной оси на плоской нижней части 52 выполнено 20 углублений-протекторов 53 в виде прямоугольных пирамид с прямолинейной вершиной, способствующих образованию грунтозацепа при контактировании с заболоченным основанием.
В результате габаритные размеры добавочных движителей с развитой опорной поверхностью 15, 16 следующие:
ширина В=480 мм;
длина L (колея)=6034 мм;
длина загнутого конца ;
высота hзк=86 мм;
высота плоскодонного желоба hж=15 мм;
радиус плоскодонного желоба rж=10 мм;
высота углубления-протектора hп=20 мм;
ширина углубления-протектора ап=135 мм;
длина углубления-протектора вп=300 мм;
длина прямолинейной вершины протектора впв=50 мм.
Накладная сопряженная рычажная система 17, содержащая сборочные единицы 22, 23, 24, 25, конструктивно образована из рычажного механизма 54, который составлен из подвижных элементов 55 с возможностью воспроизведения прямолинейно-поступательного движения. Начальные два звена элементов 55, установленные в направляющий механизм 26 для обеспечения шагания добавочных движителей 15, 16, выполнены так, что в местах их установки в корпусную часть механизма 26, передняя часть составлена из двух параллельных плечей 56, 57, соединенных валиком 58. При этом, одно звено элементов 55 с валиком установлено в корпусную часть 26 с возможностью перемещения по направляющим 59 этого механизма. Другое звено элемента 55 с валиком 60 установлено с возможностью только поворота. Одновременно с этим на валик 58 в его средней по длине части установлен рычажный механизм 61, кинематически связанный с силовым приводом-гидроцилиндром 36. Конечное звено 55 механизма 54 установлено с шарнирной подвижностью за счет валика 62 на кронштейн 63, который кинематически связан с кронштейном 64. Кронштейн 64 расположен на добавочных движителях 13, 14, 15, 16. Кинематическая связь выполнена за счет пластинчатой рессоры 65. Крепление ее выполнено с помощью винтов с потайной головкой 66. Накладная рычажная система 17 для добавочных движителей 13, 14 по конструктивности аналогична добавочным движителям 15, 16 лишь с различием работы установленного направляющего механизма 67. В нем начальное звено 55, установленное на валик 58, движется только прямолинейно по направляющим 68 в сборочных единицах 22, 23 механизма 26.
Направляющие 59 механизма 26 выполнены криволинейными так, что валик 58 за счет работы поворотного гидродвигателя 37, поворачивающий ось гидроцилиндра 36 и рычажный механизм 61, может двигаться по криволинейной направляющей «С» для системы 17 в сборочной единице 25 и по криволинейной направляющей «Т» в сборочной единице 24 для добавочных движителей 15, 16. Такое движение добавочных движителей 15, 16 будет означать движение шагания вперед, одновременно с движением ВГМ вперед. При движении самоходной артиллерийской установки 2 назад валик 58 движется по криволинейной направляющей «У» сборной единицы 25 и по криволинейной направляющей «Ф» в сборочной единице 24 добавочных движителей 15, 16, В местах выхода с этих криволинейных поверхностей «С, Т, У, Ф» на горизонтальную направляющую «Ц» установлены поворотные створки 69, подпружиненные с помощью пружины 70, которые в исходном положении перекрывают выход на направляющую «Ц». При выходе с соответствующей криволинейной направляющей валик 58 поворачивает створку 69 для выхода на направляющую «Ц» и возобновления движения добавочных движителей 15, 16 по принципу шагания согласно указанной стрелками кривой «Ш». Управление работой гидроцилиндра 36 и гидродвигателя 37 осуществляется направляющей и регулирующей гидравлической аппаратуры (не показана), работающей независимой гидросистемы 71, которая установлена у левого борта перед моторной перегородкой 72 герметизированного моторно-трансмиссионного отделения 73 самоходной артиллерийской установки 2.
Рычажный механизм 61 содержит двуплечий рычаг 74 с опорой качения 75 и пружин поджатия 76, установленные на обоих плечах рычага 74. Прямолинейное плечо рычага 74 кинематически связано с гидроцилиндром 36, а криволинейное плечо этого рычага кинематически связано с валиком 58 с помощью рычага 77, который поджат пружиной 78.
В направляющем механизме 67 для добавочных движителей 13, 14, работающих по принципу скольжения, гидроцилиндр 36 кинематически связан с валиком 58, движущимся по направляющей «Ю» за счет рычажного механизма 79, в котором установлен двуплечий рычаг 80 с опорой качания 81. Прямолинейное плечо рычага 80кинематически связано с гидроцилиндром 36, а криволинейное плечо этого рычага кинематически связано с валиком 58 с помощью рычага 82. Каждая сборочная единица 22, 23, 24, 25 выполнены из двух частей так, что на неподвижную корпусную часть 83 для сборок 22, 24 и неподвижную корпусную часть 84 для сборок 23, 25 установлены поворотная корпусная часть 85 для сборки 22, поворотная корпусная часть 86 для сборки 23, поворотная корпусная часть 87 для сборки 24, поворотная корпусная часть 88 для сборки 25. При этом, каждая поворотная корпусная часть 85, 86, 87, 88 поджата к соответствующей неподвижной части 83, 84 с помощью пружины 89 и застопорена фиксатором 90. Фиксатор 90, состоящий из шарика 91, пружины 92 и кожуха 93, установлен на поворотную корпусную часть, а на неподвижной части выполнено углубление 94 под шарик 91. Расстопаривание фиксатора 90 происходит только после превышения усилия поджатия пружины 92, возникающего при воздействии препятствия на подвеску 28 и рычажный механизм 54. Шарнирность каждой поворотной корпусной части 85, 86, 87, 88 выполнена за счет установки на неподвижную часть 83, 84 поворотной оси 95.
Высота всех добавочных движителей 13, 14, 15, 16 такова, что их нижняя часть 38 в рабочем положении расположена в одной плоскости с опорной поверхностью траков 7 гусеничного движителя 3 без учета грунтозацепов. Окончание перевода из транспортного положения в рабочее обеспечивается установкой конечных выключателей (не показано), расположенных на участках движения начальных звеньев 55. Управление работой силового привода гидроцилиндра 36 и гидродвигателя 37 встроено в управление переключения передач и направления движения (вперед, назад, повороты).
ВГМ с накладным съемным комплексным устройством добавочных движителей и дополнительными уширителями работает следующим образом:
- при прямолинейном движении вперед механик-водитель из отделения управления движением 19 переводит добавочные движители из транспортного положения в рабочее за счет работы направляющей и регулирующей гидроаппаратуры и подачи рабочей жидкости от гидросистемы 71 на все гидроцилиндры 36. По команде механика-водителя дистанционно подается рабочая жидкость в поворотный гидродвигатель 37. Для движителей 15, 16 движение валика 58 в сборках 24, 25 происходит по направляющим «Ц». Гидродвигатель 37 поворачивает продольную ось гидроцилиндра 36 в сборочной единице 24 вниз, а в сборочной единице 25 -вверх. Опускание рычажного механизма 61 относительно опоры качания 75 в сборке 24 и подъема рычажного механизма 61 в сборке 25 заставит гидросистему 71 подавать рабочую жидкость в гидроцилиндр 36. Под действием этого подвижный валик 58 в направляющем механизме 26 двигается соответственно в сборке 24 вниз по направляющей «Т», а в сборке 25 - вверх по направляющей «С». При выходе валика 58 с направляющей «Т» на направляющую «Ц» в сборке 24 и с направляющей «С» на направляющую «Ц» в сборке 25 он повернет подпружиненную поворотную створку 69 для возобновления движения шагания согласно указанной стрелками кривой «Ш». Высота подъема опорной поверхности движителей 15, 16 составляет 150 мм. В момент опускания опоры возникает переходный процесс скольжения шагающей опоры движителей 15, 16 о грунт.
- при выполнении поворота одновременно с подтормаживанием одного из сторонних гусеничных движителей 3 автоматически происходит подтормаживание соответственно стороннего добавочного движителя 15 или 16 за счет работы направляющей и регулирующей аппаратуры гидросистемы 71.
- при выполнении прямолинейного движения назад механик-водитель подает команду на подачу рабочей жидкости в поворотный гидродвигатель 37. Происходит поворот продольной оси гидроцилиндра 36 в сборочной единице 24 вверх, а в сборочной единице 25 - вниз. Подъем рычажного механизма 61 относительно опоры качания 75 в сборочной единице 24 и опускание рычажного механизма 61 в сборке 25 заставит гидросистему 71 подавать рабочую жидкость в гидроцилиндры 36. Под действием этого подвижный валик 58 в направляющем механизме 26 будет двигаться соответственно в сборке 24 вверх по направляющей «Ф», а в сборке 25 - вниз по направляющей «У». При выходе валика 58 с направляющей «Ф» на направляющую «Ц» в сборке 24 и с направляющей «У» на направляющую «Ц» в сборке 25, он повернет подпружиненную поворотную створку 69 для возобновления шагания в обратном направлении кривой «Ш».
Работа подвески 28 состоит в том, что при встрече добавочных движителей 13, 14, 15, 16 с препятствием их нижняя часть 38 в результате нагрузки на рычаги 31, 32 от усилия пружины 33 будет подниматься вверх. Вместе с этим за счет шарнирно продольного качания рычагов 29, 30, 31, 32 они будут складываться располагаясь в углублении 50. В конце подъема движителей 13, 14, 15, 16 амортизирующая прокладка 48 сконтактирует с днищем корпуса 4. После прохождения препятствия движители 13, 14, 15, 16 будут возвращаться в рабочее положение за счет совместной работы амортизирующей прокладки 48, рычагов 29, 30, 31, 32 под действием увеличения нагрузки пружины 33. Одновременно с поднятием передних частей добавочных движителей 13, 14, 15, 16 их соответствующие поворотные корпусные части 85, 89, 87, 88 после расстопаривания стопорного фиксатора 90 будут поворачиваться вверх относительно поворотной оси 95. После прохождения препятствия эти корпусные части 85, 86, 87, 88 будут также опускаться вниз одновременно с опусканием добавочных движителей 13, 14, 15, 16 до срабатывания фиксатора 90.
Избирательность перехода заключается в том, что добавочные движители 15, 16 могут в зависимости от эксплуатационных обстоятельств (в зимний период с неглубоким снежным покровом) переводиться не на движение шагания, а на движение скольжения, аналогично работе движителей 13, 14.
В результате реализации предложенного изобретения среднее удельное давление на грунт снизится до 0,24 кг/см2 (0,024 МПа), что приведет к значительному повышению проходимости на слабых грунтах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ГУСЕНИЧНОЕ ШАССИ НА ЕДИНОЙ ПЛАТФОРМЕ | 2009 |
|
RU2433934C2 |
| СПОСОБ УВЕЛИЧЕНИЯ ПЛОЩАДИ ОПОРНОЙ ПОВЕРХНОСТИ ГУСЕНИЧНОЙ МАШИНЫ ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ПО ГРУНТАМ С НИЗКОЙ НЕСУЩЕЙ СПОСОБНОСТЬЮ | 2014 |
|
RU2544459C1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2004 |
|
RU2279371C2 |
| УШИРЕННАЯ ГУСЕНИЦА С ПАРАЛЛЕЛЬНЫМ РЕЗИНОМЕТАЛЛИЧЕСКИМ ШАРНИРОМ (ВАРИАНТЫ) | 2004 |
|
RU2278052C2 |
| ГУСЕНИЧНАЯ ЦЕПЬ ХОДОВОЙ ЧАСТИ СНЕГОБОЛОТОХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2538650C1 |
| УНИВЕРСАЛЬНОЕ ГУСЕНИЧНОЕ ШАССИ | 2013 |
|
RU2541590C1 |
| УНИВЕРСАЛЬНОЕ ШАССИ НА ЕДИНОЙ ПЛАТФОРМЕ С КОЛЕСНЫМИ ДВИЖИТЕЛЯМИ | 2014 |
|
RU2560941C1 |
| БРОНИРОВАННАЯ ИНЖЕНЕРНАЯ ДОРОЖНАЯ МАШИНА | 2010 |
|
RU2440547C1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| Способ кратковременного повышения проходимости военных гусеничных машин по основаниям с низкой несущей способностью | 2021 |
|
RU2781168C1 |




Изобретение относится к военным гусеничным машинам (ВГМ) повышенной проходимости на слабых грунтах. ВГМ на корпусе содержит тонкобронный корпус, включающий отделение управления движением, боевое отделение с основным вооружением, герметизированное моторно-трансмиссионное отделение, ходовую часть в виде гусеничных движителей с подвеской. Дополнительно установлено накладное съемное комплексное устройство с развитой опорной поверхностью, составленное из четырех отдельных добавочных движителей с независимой подвеской. Накладное съемное комплексное устройство имеет силовой привод перевода добавочных движителей из транспортного положения в рабочее. Устройство перевода выполнено так, что корпус каждого представляет собой составную конструкцию лыжи с загнутыми краями и образует форму герметизированного пустотелого понтона. Силовой привод перевода добавочных движителей из транспортного положения в рабочее выполнен с помощью гидроцилиндров. Добавочные движители состоят из двух выполняющих скольжение и двух выполняющих шагание. На траки гусеничных движителей с обеих сторон установлены с возможностью демонтажа дополнительные уширители. Достигается повышение проходимости ВГМ за счет снижения давления на грунт. 2 з.п. ф-лы, 14 ил.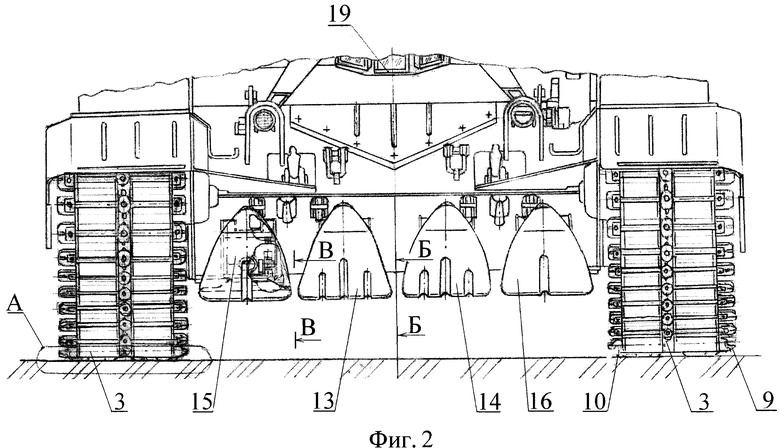
1. Военная гусеничная машина с повышенной проходимостью на слабых грунтах, содержащая тонкобронный корпус, включающий отделение управления движением, боевое отделение с основным вооружением, герметизированное моторно-трансмиссионное отделение, ходовую часть в виде гусеничных движителей с подвеской, отличающаяся тем, что на ее корпус установлено накладное съемное комплексное устройство с развитой опорной поверхностью, составленное из четырех отдельных добавочных движителей с независимой подвеской, с силовым приводом перевода их из транспортного положения в рабочее, управляемых дистанционно из отделения управления движением и с избирательностью самого перевода, выполненных так, что корпус каждого движителя представляет собой составную конструкцию лыжи с загнутыми краями, образуя форму герметизированного пустотелого понтона, установка на тонкобронный корпус выполнена с помощью накладной сопряженной рычажной системы, расположенной на краях лыжи, силовой привод перевода добавочных движителей из транспортного положения в рабочее выполнен с помощью гидроцилиндров, питаемых от независимой гидросистемы, а сами добавочные движители по принципу работы разделены так, что два добавочных движителя выполняют скольжение, а два других выполняют шагание, при этом для двух последних в кинематическую цепь рычажной системы и гидроцилиндра установлен направляющий механизм выполнения шагания с силовым приводом в виде поворотного гидродвигателя для шагания вперед или назад, а на траки гусеничных движителей с обеих сторон установлены с возможностью демонтажа дополнительные уширители опорной поверхности.
2. Военная гусеничная машина с повышенной проходимостью на слабых грунтах по п. 1, отличающаяся тем, что подвеска добавочных движителей составлена из пружинно-рычажных элементов с продольным качанием рычагов, шарнирно связанных между собой и поджатых пружиной сжатия, установленной с помощью подвижного стержня и траверсы.
3. Военная гусеничная машина с повышенной проходимостью на слабых грунтах по п. 1, отличающаяся тем, что нижняя поверхность двух добавочных движителей, выполняющих скольжение, выполнена с тремя продольными углублениями на каждый движитель, а нижняя поверхность двух других движителей, выполняющих шагание, выполнена с одним продольным углублением и двадцатью углублениями-протекторами в виде прямоугольных пирамид с прямолинейной вершиной на каждый движитель.
| СПОСОБ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ДВИЖИТЕЛЯ ВОЕННОЙ ТЕХНИКИ И УСТРОЙСТВО ДВИЖИТЕЛЯ ВОЕННОЙ ТЕХНИКИ | 2013 |
|
RU2536267C1 |
| Шагающая опора транспортного средства | 1976 |
|
SU770906A1 |
| EP 1431166 A2, 23.06.2004 | |||
| US 2004173397 A1, 09.09.2004. | |||

