1131
Изобретение относится к устройствам для извлечения аллантоисной жидкости (АЖ) из зараженных куриных эмбрионов и может быть использовано в медицинской и микробиологической промьшшенности.
Целью изобретения является сокращение времени извлечения аллантоисной зцидкости.
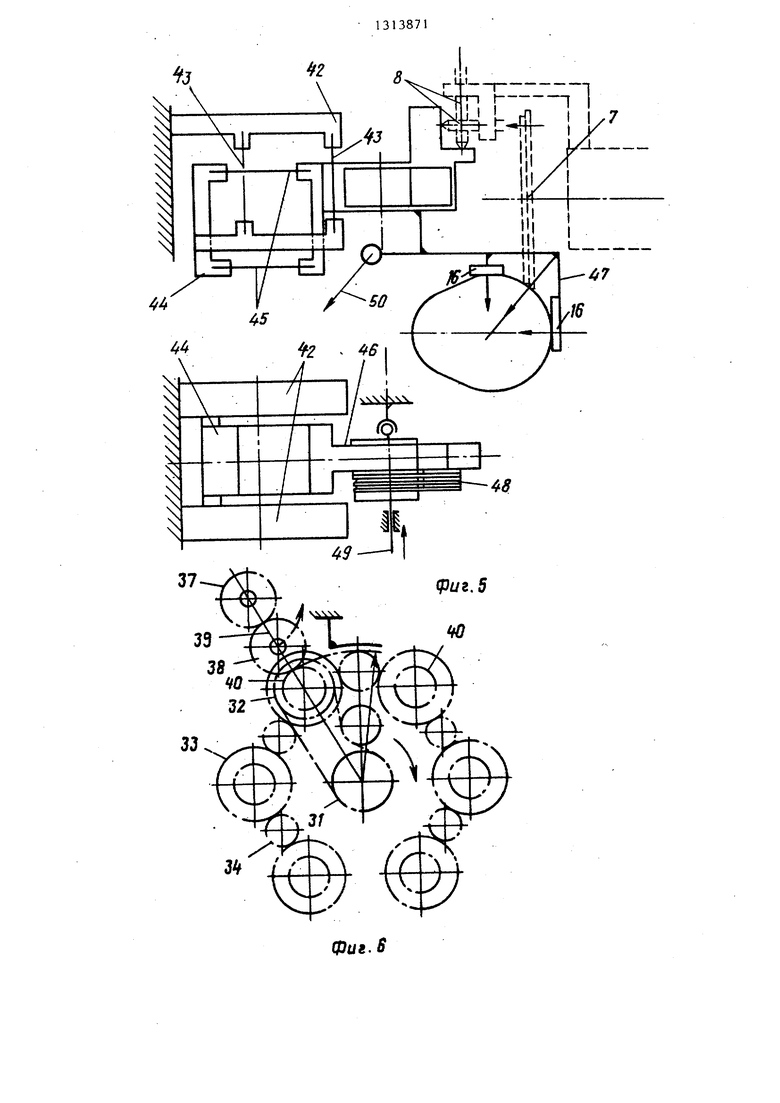
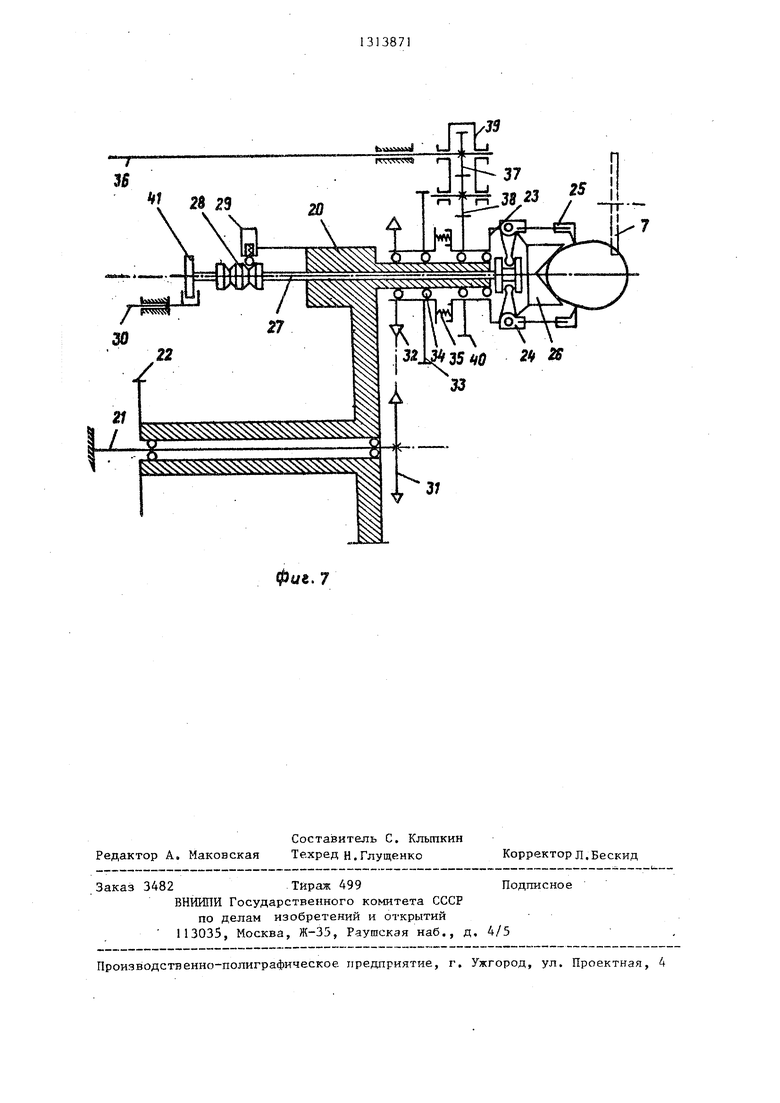
На фиг. 1 показано расположение фрезерной головки относительно яйца; на фиг. 2 представлена развернутая схема по всем транспортным и технологическим процессам; на фиг. 3 - ки- нематическа.я схемачётырехпозиционног блока разрезания яиц; на фиг. 4 - схема блока для обработки отходов яиц; на фиг. 5 - схема корректировки положения фрезерной головки с приводом; на фиг. 6 - схема блока для из- влечения жидкости; на фиг. 7 - схема зажимного патрона.
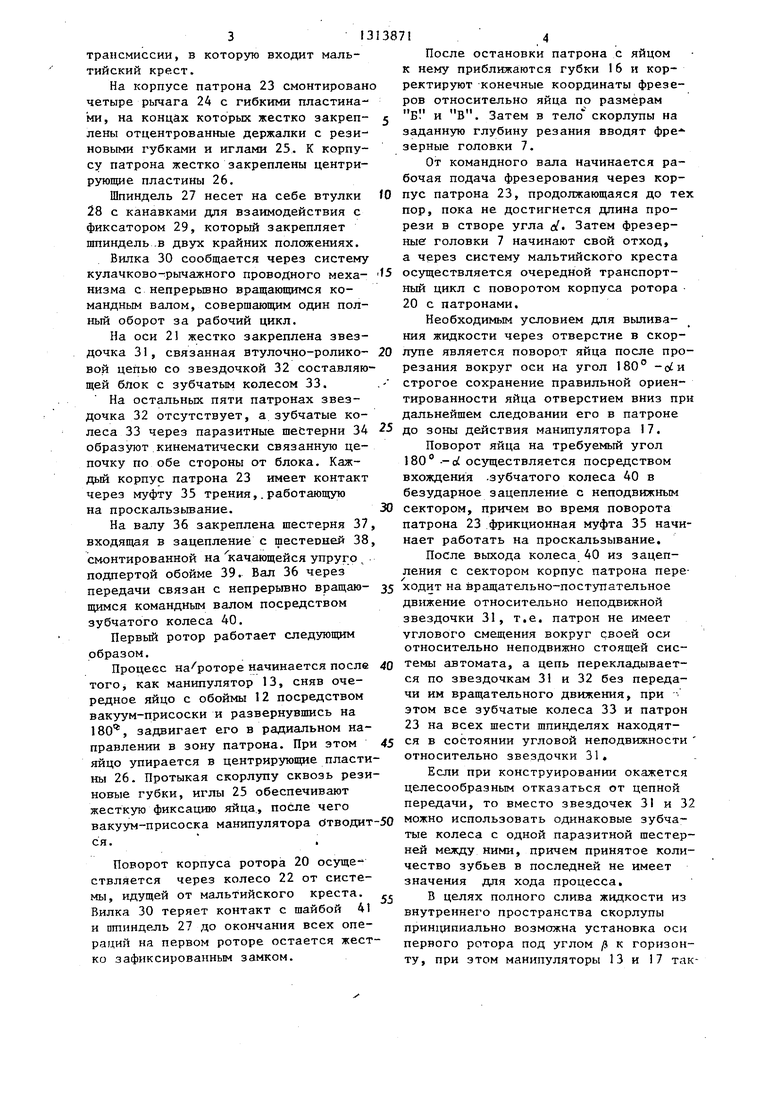
В яйце с осью симметрии А-А, располагаемой горизонтально или под углом ft к горизонту, профрезеровьгоают щель в поперечной плоскости скорлупы 1, подскорлупной оболочке 2 и хорион- аллантоисной оболочке 3, на участках скорлупы и оболочек, находящихся в наибольшем отдалении от желточного пузыря 4 и плода 5, при этом оболочки, отделяющие воздушный пузырь 6, могут, не разрушаться.
После заглубления фрезерной головки 7 в скорлупу при помощи привода 8 яйцу сообщается вращение подачи вокруг оси симметрии А-А, в результате чего образуется окно в створе углао После поворота яйца прорезью вниз происходит свободное вытекание АЖ из всех пазух, окружащих желточный :пузырь и плод (положение прорези после поворота изображено пунктиром) ;,
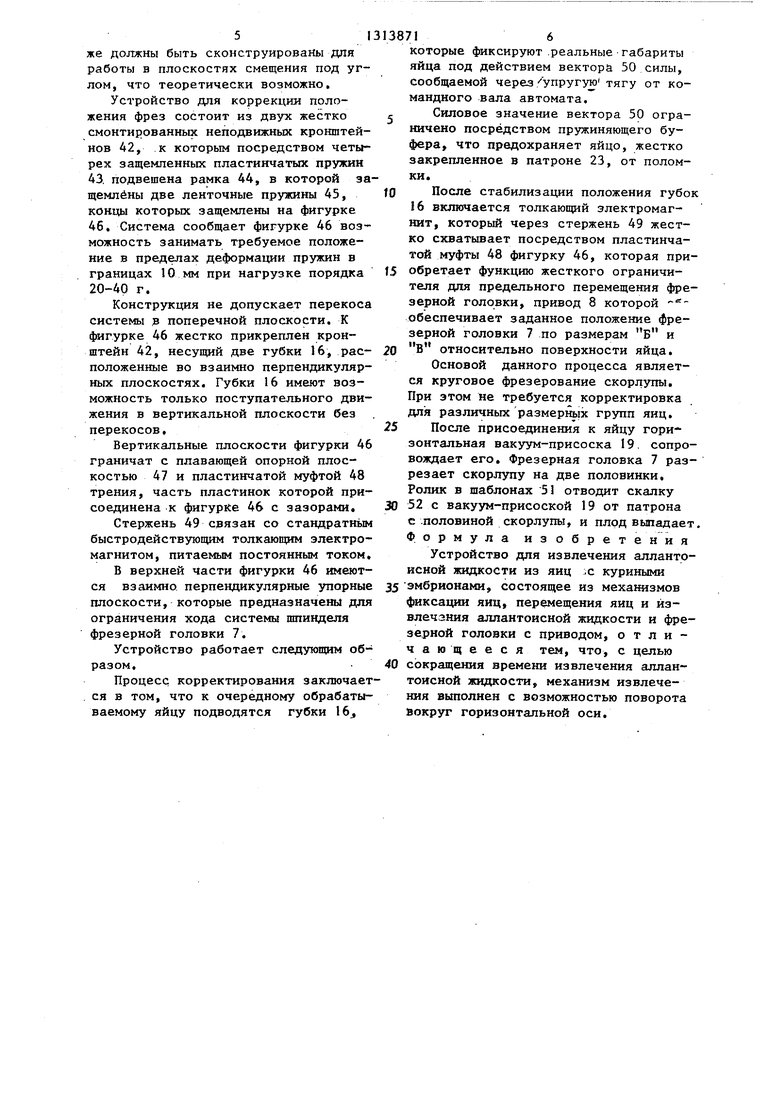
В целях предотвращения попадания стружки яичной скорлупы и оболочек внутрь полости яйца по ходу фрезерования необходимо соблюдать правильное направление вращения фрез и яйца i К автомату яйца подают в унифи- цированных кассетах 9, при этом они могут занимать смещенное от вертикали положение с уклоном осей АтА.
Из кассеты посредством механизма фиксации яиц, выполненного в виде вертикальных вакуум-присосок 10, одновременно извлекается весь ряд яиц, которые встречают на своем пути неподвижный корректор 11, обеспечиваюI2
щий поворот оси А-А каждого яйца, для чего глубина вакуума не должна препятствовать проскальзыванию поверхности скорлупы по торцу вертикальной вакуум-присоски 10.
В конце хода вертикальных вакуум- присосок 10 яйца укладываются в приз матическре гнездо многоместной обоймы 12, где они стабилизируют свое горизонтальное положение, ориентирование вершин яиц при этом однородно по радиусам кривизны. Из обоймы 12 производится поштучный отбор яиц посредством механизма перемещения яиц, вьшолненного в виде ротативно- го манипулятора 13, вакуум-присоски которого переносят яйцо из обоймы в зажимной патрон, В патроне яйцо ориентируется направляющими шаблонами 14 и захватывается резиноигольчаты- ми губками 15, после чего вакуум-присоски снимаются,
К зажатому в патроне яйцу прижимаются губки 16 соответствующего датчика, который: обеспечивает установку фрезерных головок 7 для каждого очередного обрабатываемого яйца. Этим обеспечивается соблюдение размеров Б и В.
На этой же позиции осуществляется прорезание отверстия в створе угла о. Затем следует поворот яйца вокруг горизонтальной оси при помощи механима извлечения АЖ, вьшолненного в вид манипулятора 17, с перемещением отверстия вниз, и наступает свободное истечение АЖ, после чего Mair пулятор 17 с вакуум-присосками извлекает яйцо из патрона и укладывает его в губки патрона Г8 дпя дальнейшей разделки. К яйцу приближается горизонтальная вакуум-присоска 19 и присасывается к его вершине.
На следующей операции фрезерная головка 7 осуществляет круговое разрезание, скорлупы и пленок, при этом яйцо поворачивается вокруг оси на 360.
После отвода горизонтальной вакуум-присоски 19 плод выпадает, и на следующей позиции порожние половинки скорлупок высвобождаются и падают.
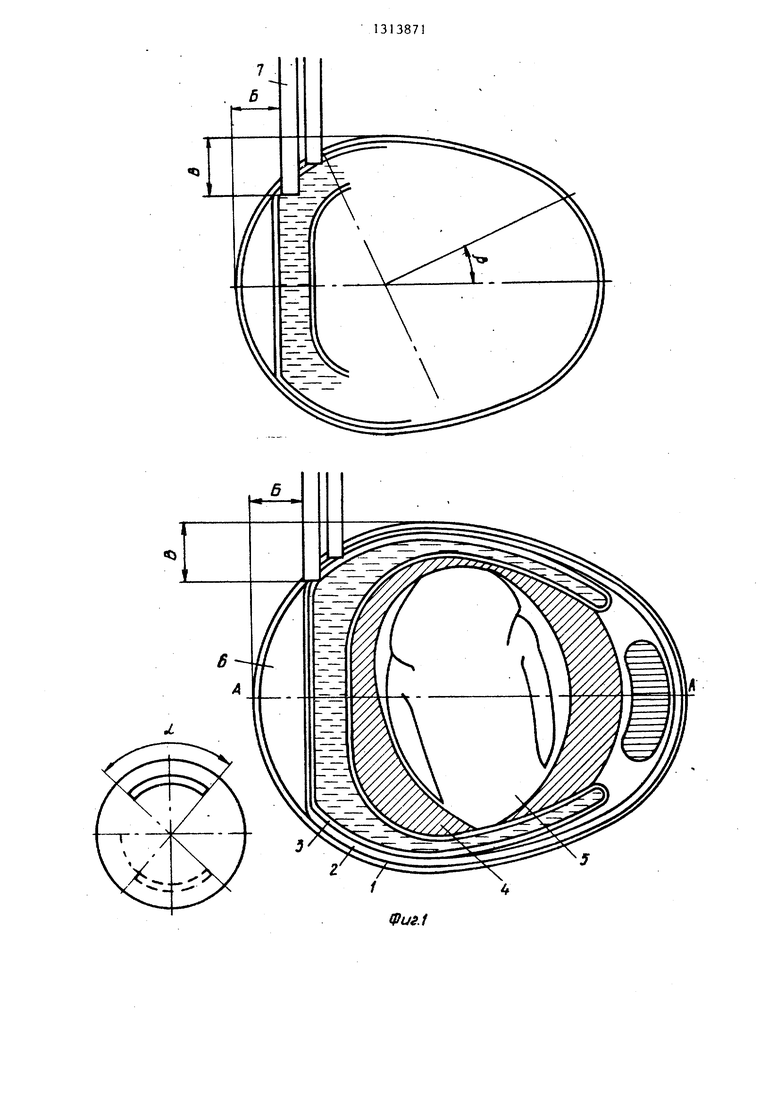
Шпиндели с патронами смонтированы на полых осях, составляющих жесткое целое с корпусом ротора 20, который имеет свободу вращения вокруг непод-. вижной консольной оси 21. Через зубчатое колесо 22 блок присоединен с
трансмиссии, в которую входит мальтийский крест.
На корпусе патрона 23 смонтировано четыре рычага 24 с гибкими пластина-- ми, на концах которых жестко закреп- 5 лены отцентрованные держалки с резиновыми губками и иглами 25. К корпусу патрона жестко закреплены центрирующие пластины 26.
Шпиндель 27 несет на себе втулки fO 28 с канавками для взаимодействия с фиксатором 29, который закрепляет шпиндель .в двух крайних положениях.
Вилка 30 сообщается через систему кулачково-грычажного проводного меха- низма с непрерьшно вращающимся командным валом, совершающим один полный оборот за рабочий цикл.
На оси 21 жестко закреплена звездочка 31, связанная втулочно-ролико- 20 вой цепью со звездочкой 32 составляющей блок с зубчатым колесом 33.
На остальных пяти патронах звездочка 32 отсутствует, а зубчатые колеса 33 через паразитные шестерни 34 -5 образуют кинематически связанную цепочку по обе стороны от блока. Каждый корпус патрона 23 имеет контакт через муфту 35 трения,.работающую на проскальзывание.30
На валу 36 закреплена шестерня 37, входящая в зацепление с шестерней 38, смонтированной на качающейся упруго , подпертой обойме 39. Вал 36 через передачи связан с непрерьшно вращаю- 35 щимся командным валом посредством зубчатого колеса 40.
Первый ротор работает следующим образом.
Процесс на роторе начинается после 40 того, как манипулятор 13, сняв очередное яйцо с обоймы 12 посредством вакуум-присоски и развернувшись на 180, задвигает его в радиальном наПосле остановки патрона с яйцом к нему приближаются губки 16 и корректируют конечные координаты фрезеров относительно яйца по размерам и в. Затем в тело скорлупы на заданную глубину резания вводят фре- зерные головки 7.
От командного вала начинается рабочая подача фрезерования через корпус патрона 23, продолжающаяся до тех пор, пока не достигнется длина прорези в створе угла d. Затем фрезерные головки 7 начинают свой отход, а через систему мальтийского креста осуществляется очередной транспортный цикл с поворотом корпуса ротора 20 с патронами.
Необходимым условием для выливания жидкости через отверстие в скорлупе является поворот яйца после про- резания вокруг оси на угол 180° строгое сохранение правильной ориентированности яйца отверстием вниз при дальнейшем следовании его в патроне до зоны действия манипулятора 17.
Поворот яйца на требуемьй угол 180° -d осуществляется посредством вхождения -зубчатого колеса 40 в безударное зацепление с неподвижным сектором, причем во время поворота патрона 23 фрикционная муфта 35 начинает работать на проскальзывание.
После выхода колеса 40 из зацепления с сектором корпус патрона переходит на вращательно-поступательное движение относительно неподвижной звездочки 31, т.е. патрон не имеет углового смещения вокруг своей оси относительно неподвижно стоящей системы автомата, а цепь перекладывается по звездочкам 31 и 32 без передачи им вращательного движения, при этом все зубчатые колеса 33 и патрон 23 на всех шести шпинделях находятся в состоянии угловой неподвижности относительно звездочки 31.
Если при конструировании окажется целесообразным отказаться от цепной передачи, то вместо звездочек 31 и 32
правлении в зону патрона. При этом 45 яйцо упирается в центрирующие пластины 26. Протыкая скорлупу сквозь резиновые губки, иглы 25 обеспечивают жесткую фиксацию яйца., после чего вакуум-присоска манипулятора с(тводит-50 можно использовать одинаковые зубчатые колеса с одной паразитной шестер- ся.
ней между ними, причем принятое колиПоворот корпуса ротора 20 осуще- чество зубьев в последней не имеет ствляется через колесо 22 от систе- значения для хода процесса, мы, идущей от мальтийского креста. Вилка 30 теряет контакт с шайбой 41 и пшиндель 27 до окончания всех операций на первом роторе остается жестко зафиксированным замком.
В целях полного слива жидкости из внутреннего пространства скорлупы прин1у1пиально возможна установка оси первого ротора под углом /} к горизонту, при этом манипуляторы 13 и 17 такПосле остановки патрона с яйцом к нему приближаются губки 16 и корректируют конечные координаты фрезеров относительно яйца по размерам и в. Затем в тело скорлупы на заданную глубину резания вводят фре- зерные головки 7.
От командного вала начинается рабочая подача фрезерования через корпус патрона 23, продолжающаяся до те пор, пока не достигнется длина прорези в створе угла d. Затем фрезерные головки 7 начинают свой отход, а через систему мальтийского креста осуществляется очередной транспортный цикл с поворотом корпуса ротора 20 с патронами.
Необходимым условием для выливания жидкости через отверстие в скорлупе является поворот яйца после про резания вокруг оси на угол 180° строгое сохранение правильной ориентированности яйца отверстием вниз пр дальнейшем следовании его в патроне до зоны действия манипулятора 17.
Поворот яйца на требуемьй угол 180° -d осуществляется посредством вхождения -зубчатого колеса 40 в безударное зацепление с неподвижным сектором, причем во время поворота патрона 23 фрикционная муфта 35 начинает работать на проскальзывание.
После выхода колеса 40 из зацепления с сектором корпус патрона переходит на вращательно-поступательное движение относительно неподвижной звездочки 31, т.е. патрон не имеет углового смещения вокруг своей оси относительно неподвижно стоящей системы автомата, а цепь перекладывается по звездочкам 31 и 32 без передачи им вращательного движения, при этом все зубчатые колеса 33 и патрон 23 на всех шести шпинделях находятся в состоянии угловой неподвижности относительно звездочки 31.
Если при конструировании окажется целесообразным отказаться от цепной передачи, то вместо звездочек 31 и 3
можно использовать одинаковые зубчатые колеса с одной паразитной шестер „
чество зубьев в последней не имеет значения для хода процесса,
В целях полного слива жидкости из внутреннего пространства скорлупы прин1у1пиально возможна установка оси первого ротора под углом /} к горизонту, при этом манипуляторы 13 и 17 также должны быть сконструированы для работы в плоскостях смещения под углом, что теоретически возможно.
Устройство для коррекции положения фрез состоит из двух жестко смонтированных неподвижных кронштейнов 42, к которым посредством четырех защемленных пластинчатых пружин 43. подвешена рамка 44, в которой защемлены две ленточные пружины 45, концы которых защемлены на фигурке 46. Система сообщает фигурке 46 возможность занимать требуемое положение в пределах деформации пружин в границах 10 мм при нагрузке порядка 20-40 г.
Конструкция не допускает перекоса системы э поперечной плоскости, К фигурке 46 жестко прикреплен кронштейн 42, несущий две губки 16, расположенные во взаимно перпендикулярных плоскостях. Губки 16 имеют возможность только поступательного движения в вертикальной плоскости без перекосов.
Вертикальные плоскости фигурки 46 граничат с плавающей опорной плоскостью 47 и пластинчатой муфтой 48 трения, часть пластинок которой присоединена к фигурке 46 с зазорами,
Стержень 49 связан со стандратньм быстродействующим толкающим электромагнитом, питаемым постоянным током.
В верхней части фигурки 46 имеются взаимно перпендикулярные упорные плоскости, которые предназначены для ограничения хода системы шпинделя фрезерной головки 7.
Устройство работает следующим образом.
Процесс корректирования заключается в том, что к очередному обрабатываемому яйцу подводятся губки 16j
которые фиксируют .реальные габариты яйца под действием вектора 50 силы, сообщаемой через - упругую тягу от командного вала автомата,
Силовое значение вектора 50 ограничено посредством пружиняющего буфера, что предохраняет яйцо, жестко закрепленное в патроне 23, от поломки.
После стабилизации положения губок 16 включается толкающий электромагнит, который через стержень 49 жестко схватывает посредством пластинчатой муфты 48 фигурку 46, которая приобретает функцию жесткого ограничителя для предельного перемещения фрезерной головки, привод 8 которой обеспечивает заданное положение фрезерной головки 7 по размерам Б и
в относительно поверхности яйца.
Основой данного процесса является круговое фрезерование скорлупы. При этом не требуется корректировка дп;ч различных размернь х групп яиц.
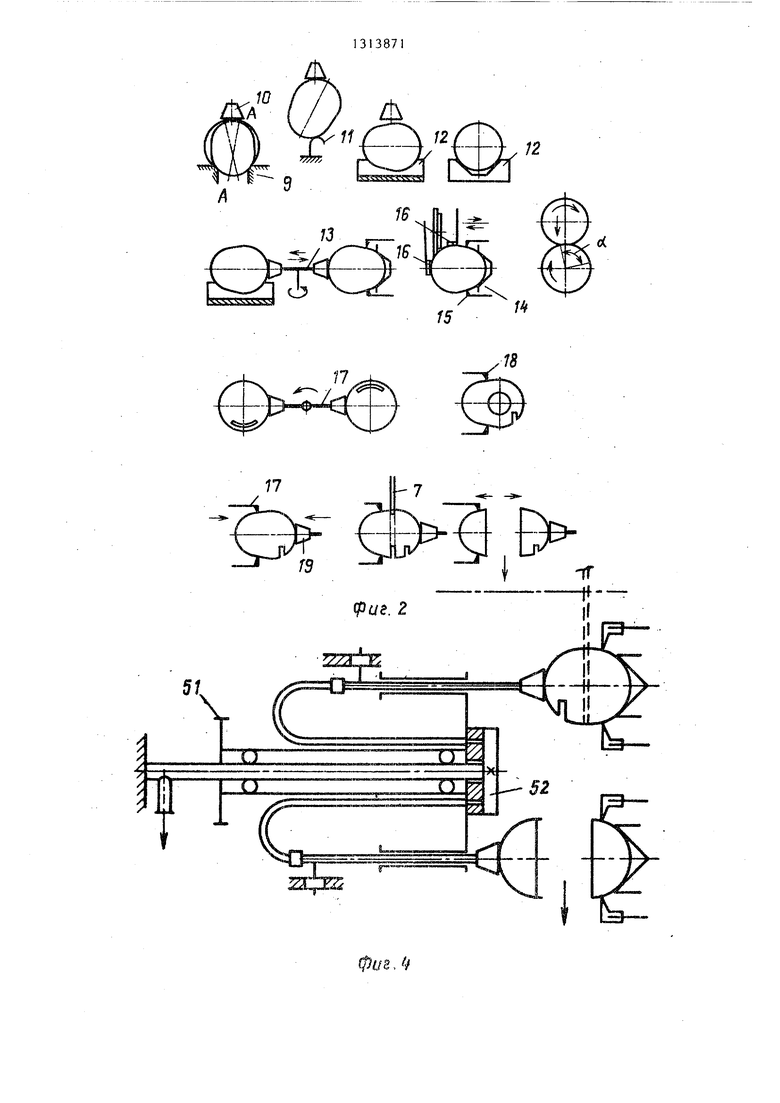
После присоединения к яйцу горизонтальная вакуум-присоска I9. сопровождает его. Фрезерная головка 7 разрезает скорлупу на две половинки. Ролик в шаблонах 51 отводит скалку
52 с вакуум-присоской 19 от патрона с .половиной скорлупы, и плод выпадает. Формула изобретения
Устройство для извлечения апланто- исной жидкости из яиц ,с куриными
эмбрионами, состоящее из механизмов фиксации яиц, перемещения яиц и йз- влечания аллантоисной жидкости и фрезерной головки с приводом, отличающееся тем, что, с целью
сокращения времени извлечения аллантоисной жидкости, механизм извлечения выполнен с возможностью поворота вокруг горизонтальной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для извлечения аллантоисной жидкости из яиц с куриными эмбрионами | 1986 |
|
SU1458381A1 |
| СПОСОБ ОБРАБОТКИ ЯИЦ (ВАРИАНТЫ) | 2002 |
|
RU2264708C2 |
| Автоматический наполнитель консервной и т. п. тары плодами | 1960 |
|
SU137814A1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОНАРЕЗНОЙ АВТОМАТ | 1970 |
|
SU271995A1 |
| Роторный автомат | 1984 |
|
SU1255392A1 |
| УСТРОЙСТВО ДЛЯ ОБСЛЕДОВАНИЯ ЯИЦ | 2017 |
|
RU2749488C1 |
| УСТРОЙСТВО ДЛЯ ОБСЛЕДОВАНИЯ ЯИЦ | 2017 |
|
RU2727743C1 |
| Автомат для обработки пуговиц | 1983 |
|
SU1123869A1 |
| Устройство для установки радиоэлементов на печатные платы | 1990 |
|
SU1709575A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЗУБЧАТЫХ КОЛЕС ТОРЦЕВОГО, ЦЕВОЧНОГО И ЦИКЛОИДАЛЬНОГО ЗАЦЕПЛЕНИЯ | 1966 |
|
SU224279A1 |
Изобретение относится к медицинской технике.Цель изобретения - сокращение времени извлечения алланто- исной жидкости.- Б яйце профрезеровы- вается щель в поперечной плоскости скорлупы, подскорлупной оболочке и хорирн-аллантоисной оболочке. После заглубления фрезерной головки 7 в скорлупу при помощи привода яйцу сообщается вращение подачи. После поворота яйца прорезью вниз происходит вытекание аллантоисной жидкости из всех пазух, окружающих желточный пузырь и плод. Шпиндели с патронами смонтированы на полых осях, составляющих жесткое целое с корпусом ротора, который имеет свободу вращения вокруг неподвижной консольной оси 21. Через зубчатое колесо 22 блок присоединен с трансмиссии. Шпиндель несет на себе втулки 28 с канавками для взаимодействия f с фиксатором. Вилка 30 сообщается через систему кулачково-рычажного приводного механизма с непрерьшно вращающимся командным валом. На валу закреплена шестерня 37, имеющая зацепление с шестерней 38, смонтированной на обойме 39. 7 ил. 7 2/ П Я ХЧЧУЧХ Х Уч ХУчУчХ : AN УчУЧУчУ у. фиг.З 21( ..«л
iffui.f
II
IB
2d.j-ES
Фия. в
Л
$$$$$ss$$$$$s$$$$$s$s$$$s$
I ifQ -2
1
3
Составитель С. Кльшкин Редактор A. Маковская Техред н. Глущенко Корректор л.Бескид
Заказ 3482Тираж 499Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Устройство для вскрытия эмбрионов и отбора экстраэмбриональной жидкости | 1976 |
|
SU577236A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
