Фиг. /
Изобретение относится к автоматике и предназначено для использования в системах управления с шаговыми двигателями.
Цель изобретения - повышение надежности устройства за счет сокращения оборудования и уменьшения тока.
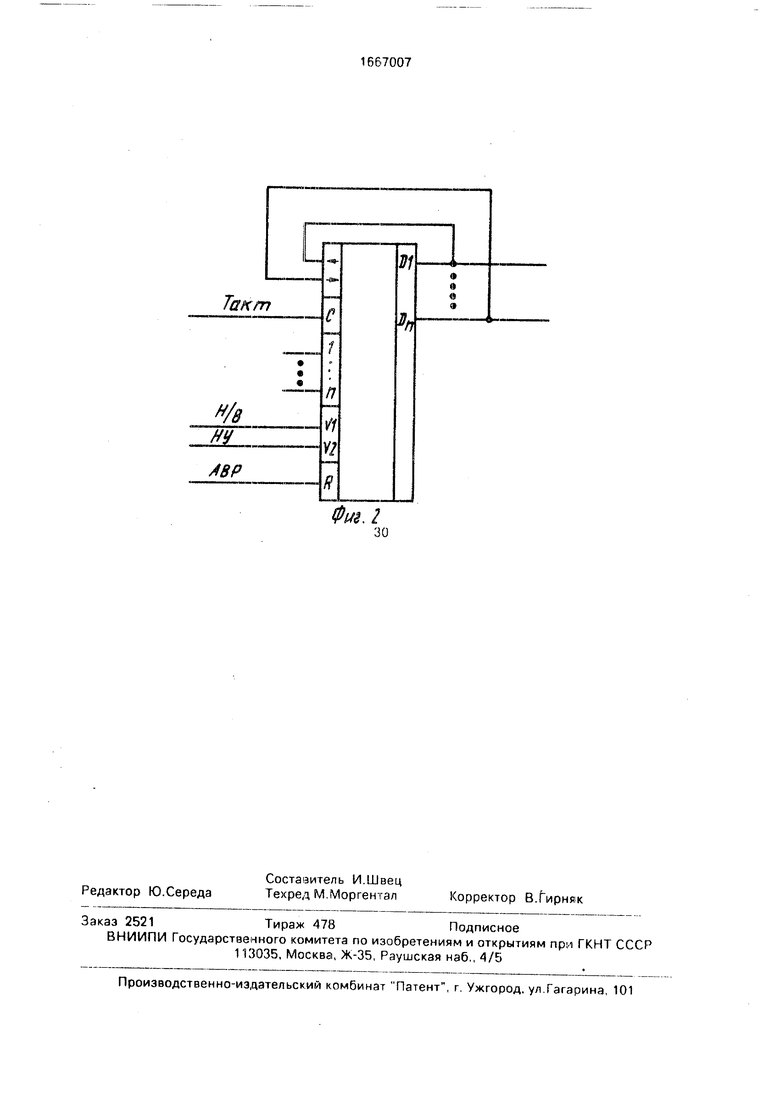
На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 - функциональная схема распределителя импульсов.
Устройство содержит задатчик 1 программы, распределитель 2 импульсов, многоканальные усилители 3, блок 4 фиксации аварии, управляемый пороговый элемент 5, элементы И 6 и 7, ключи 8-11. элементы 12-16 односторонней проводимости (вентили), элементы НЕ 17 и 18, обмотки 19 и 20 двигателя, датчик 21 тока, пороговый элемент 22, сдвиговый регистр 23.
Устройство работает следующим образом.
При включении питания или по команде программы, защитой в ПЗУ задатчика программы, он выдает единичный сигнал на входе Н/В и короткий единичный сигнал НУ. По этим сигналам происходит параллельное занесение в распределитель импульсов, находящихся на входах 1...п (фиг. 2).
Кроме этого, единичным сигналом НУ устанавливается в исходное состояние блок фиксации аварии и на его выходе формируется нулевой сигнал Авр, который разблокирует распределитель импульсов.
Далее задатчик 1 программы определяет направление вращения шагового двигателя путем формирования соответствующего уровня сигнала - левое вращение, О - правое, а на выходе Такт формирует импульсную последовательность, число импульсов которой соответствует количеству шагов перемещения.
На выходе Упр формируется сигнал низкого уровня, который обеспечивает высокий уровень срабатывания порогового элемента 5, при котором ток через обмотки и 20 достигает своего максимального значения (режим форсажа при разгоне и торможении).
Возбуждение обмоток шагового двигателя происходит следующим образом. С выхода распределителя импульсов, на первый вход элемента И 6 поступает 1, а на вход И 7 - 04. При этом на вход элемента И б поступает, а на вход И 7- О. На выходе элемента И 7 формируется нулевой сигнал, который закрывает ключ 11, а ключ 9 открывается, так как на выходе элемента НЕ 18 формируется единичный сигнал, ключ 8 закрыт, так как на выходе элемента НЕ 17
сформирован нулевой сигнал, а ключ 10 открыт. Через открытые ключи 9 и 10, датчик 21 тока и последовательно соединенные обмотки 19 и 20 начинает протекать ток, который увеличивается до тех пор, пока уровень напряжения на датчике не достигает порога срабатывания управляемого порогового элемента.
На его выходе формируе/ся сигнал
0 низкого уровня, который через элемент И 6 закроет ключ 10. Возникающая при включении ключа 10 ЭДС самоиндукции замыкается по следующей цепи: вентиль 15 - нулевая шина - датчик 21 тока - открытый ключ 9 5 последовательно соединенные обмотки 19 и 20.
Ток в цепи начинает медленно уменьшаться до уровня, при котором уровень напряжения на датчике 21 тока переключит
0 пороговый элемент 5 в исходное состояние и на его выходе снова возникает единичный сигнал, которым через элемент И 6 будет открыт ключ 10 и т.д.
Через два импульса Такт ( в случае
Ј четырехтактной коммутации) сигналы на первых входах элементов И 6 и 7 сменяются на противоположные и ключи 9 и 10 закроются, а ключи 8 и 11 будут открыты.
При этом ток в обмотках 19 и 20 изменит
0 свое направление, а процесс стабилизации тока будет аналогичен описанному. Необходимо отметить, что в отличие от прототипа, ток в обмотках 19 и 20 существует одновременно и, следовательно, его величина мо5 жет быть в два раза меньше, чем у прототипа, у которого обмотки питаются поочередно.
Например, если пренебречь потерями в ключах, то тепловая мощность потерь, выде0 ляемая в последовательно соединенных обмотках выражается следующим образом:
Pi ir 2R. где h - ток в обмотках;
R - сопротивление одной обмотки.
5Тепловая мощность, выделяемая в обмотках прототипа, выражается так
Р2 l22R, где 12 - ток в обмотках.
Если учесть, что li 2И, то получим
0 Р2 4li2R, следовательно Р2 2Pi, т.е. предлагаемое устройство имеет в два раза меньше тепловые потери на активном сопротивлении обмоток двигателя, что снижает температуру их нагрева и. следовательно,
5 увеличивает надежность работы устройства.
Если же учесть потери в ключах, то эффект будет еще выше. После разгона шагового двигателя до номинальной скорости, сигнал на выходе УПР повышается, порог
срабатывания порогового элемента 5 снижается и снижается ток в фазах.
При торможении процесс аналогичен разгону, а в режиме стоянки ток в фазах еще снижается путем повышения уровня сигнала Упр.
При увеличении тока в обмотках выше допустимого уровня сигнала с датчика 21 тока, через вентиль 12 приводит к срабатыванию порогового элемента 22 и устанавливает триггер 21 в состояние, при котором на его выходе формируется единичный сигнал Авр. Этим сигналом по R-входу блокируется распределитель импульсов и на его всех выходах формируется нулевой уровень, что приводит к одновременному закрытию ключей 10 и 11 и прерыванию тока в обмотках двигателя.
Кроме этого, сигнал АВР поступает на входзадатчика программы, который отрабатывает прерывание в соответствии с заданной программой и формирует сигнал тревоги обслуживающему персоналу.
При возникновении КЗ между выводами обмоток или при их перегреве, уменьшается постоянная цепи f тз . где L индуктивность цепи; R - сопротивление цепи, При этом возрастает скорость нарастания тока в цепи, что отслеживается уровнем сигнала на датчике 21 тока. В связи с тем. что управляемый пороговый элемент 5. в отличие от прототипа, имеет временную задержку сигнала от датчика тока за счет интегрирующей RC-цепочки, на его выходе сигнал изменяется с некоторой задержкой относительно входного. Это приводит к тому, что ток в обмотках превысит номинальный ток и произойдет срабатывание блока фиксации аварии, аналогично описанному, как и при увеличении тока выше допустимого уровня.
Формула изобретения Устройство для программного управления шаговым двигателем, содержащее за- датчик программы, выходы тактирования и задания направления вращения которого соединены с соответствующими управляющими входами распределителя импульсов, а выход начальной установки соединен с входом начальной установки распределителя импульсов и блока фиксации аварии, управляющий вход которого соединен с выходами соответствующих многоканальных усилителей, управляющие входы которых подключены к управляющему выходу задатчика программы, вход сброса которого соединен с выходом блока фиксации аварии, а первые и вторые информационные входы многоканальных усилителей соединены с соответствующей группой выходов распределителя импульсов, при этом многоканальный усилитель содержит четыре ключа, пять элементов односторонней проводимости, yrv- равляемый пороговый элемент, выход которого соединен с первыми входами первого
и второго элементов И, вторые входы которых соединены соответственно с первым и вторым информационными входами многоканального усилителя, первый вход управляемого порогового элемента соединен с
управляющим входом многоканального усилителя, второй вход с выходом датчика тока и через первый элемент односторонней проводимости - с управляющим выходом многоканального усилителя, выходы
первого и второго ключей подключены соответственно к началам первой и второй обмоток шагового двигателя и через второй и третий элементы односторонней проводимости соединены с входом первого и второго ключей и с шиной питания, концы первой и второй обмоток шагового двигателя объединены, выходы первого и второго элементов И соединены с управляющими входами соответственно, первого и второго ключей,
отличающееся тем, что, с целью повышения надежности за счет сокращения оборудования и уменьшения тока, протекающего через ключи, выход блока фиксации аварии соединен со сбросовым входом распределителя импульсов, а каждый многоканальный усилитель содержит первый и второй элементы НЕ, выходы которых соединены с управляющим входом соответственно третьего и четвертого ключей, а входы
- с вторыми входами соответственно первого и второго элементов И, а информационные входы третьего и четвертого ключей подключены к датчику тока и выходу первого и второго ключей соответственно и через
соответственно четвертый и пятый элементы односторонней проводимости - к шине нулевого потенциала, а выходы соединены с да1чиком тока.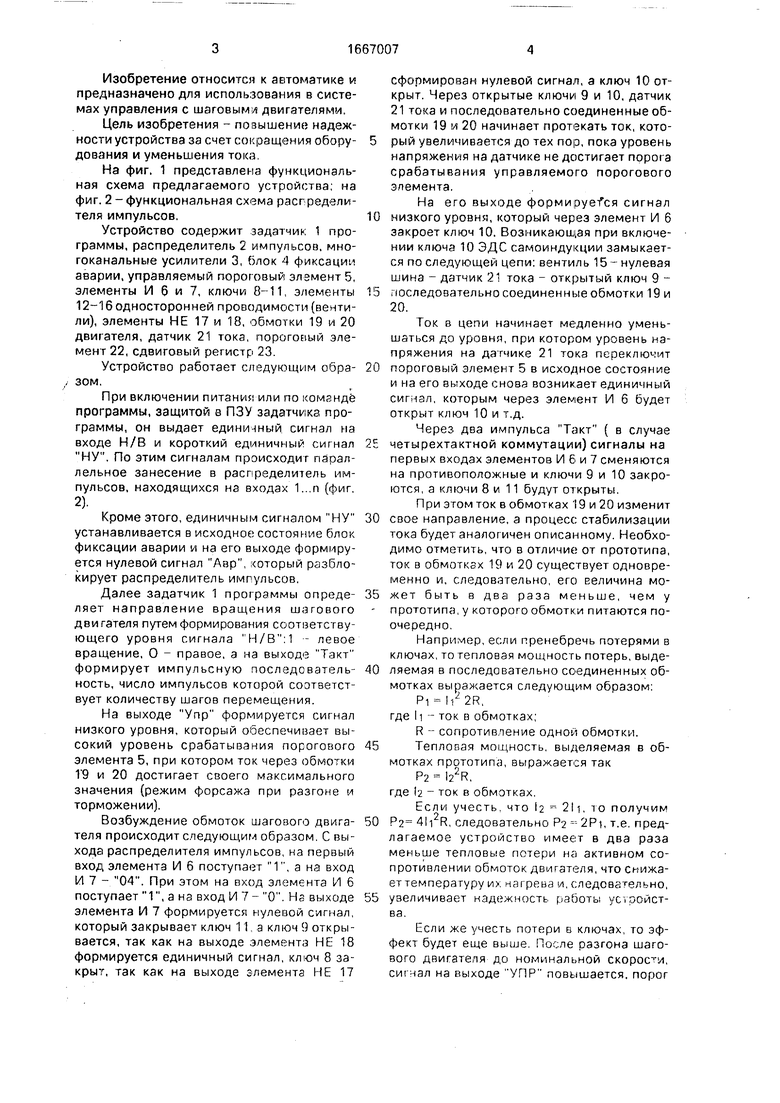

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления шаговым двигателем | 1985 |
|
SU1314312A1 |
| Устройство для программного управления шаговым двигателем | 1982 |
|
SU1043598A1 |
| Устройство для программного управления шаговым двигателем | 1985 |
|
SU1267363A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1012207A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1015339A1 |
| Устройство для программного управления шаговым двигателем | 1986 |
|
SU1383300A1 |
| Устройство для управления шаговым двигателем | 1981 |
|
SU1066019A1 |
| Устройство для управления шаговым двигателем | 1985 |
|
SU1541560A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1658367A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
Изобретение относится к автоматике и предназначено для использования в системах управления с шаговыми двигателями. Цель изобретения - повышение надежности устройства за счет сокращения оборудования и уменьшения тока. Устройство содержит задатчик программы 1, распределитель импульсов 2, многоканальные усилители 3, блок и фиксации аварии, управляемый пороговый элемент 5, элементы И 6, 7, ключи 8 - 11, элементы НЕ 17, 18, обмотки 19, 20 двигателя, триггер 21, пороговый элемент 22. 2 ил.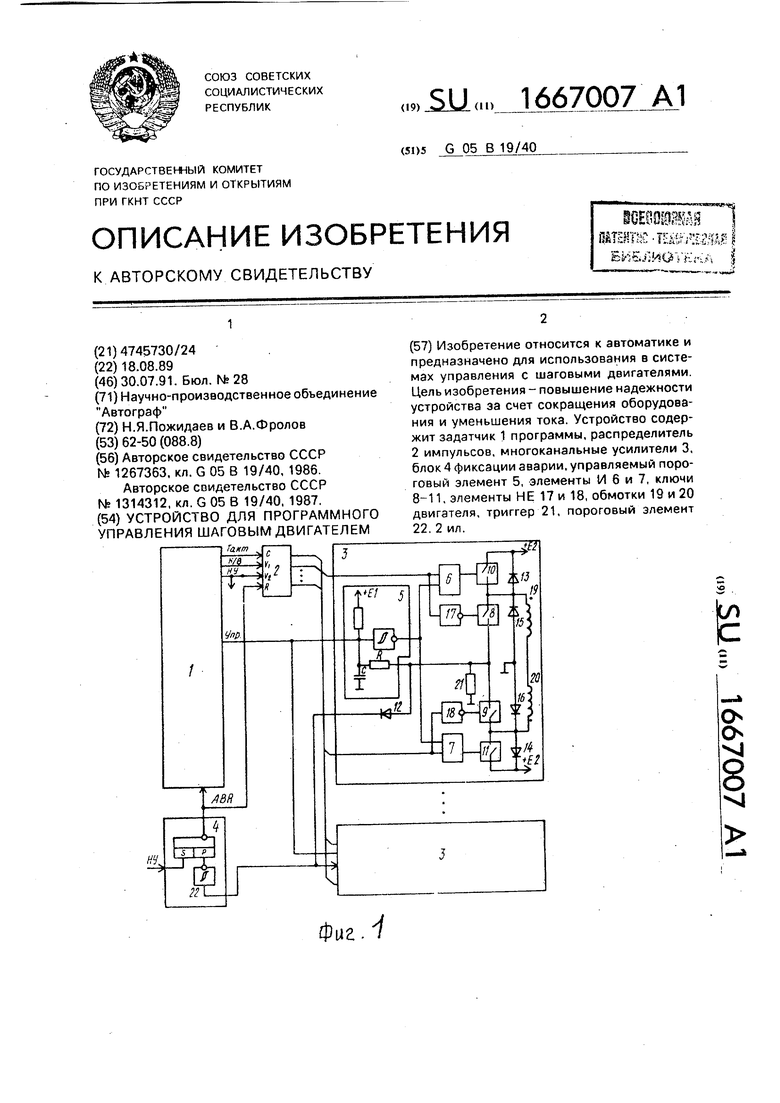
| Устройство для программного управления шаговым двигателем | 1985 |
|
SU1267363A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Устройство для программного управления шаговым двигателем | 1985 |
|
SU1314312A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
