11
Изобретение относится к электротехнике, а именно к управлению электрическими машинами переменного тока с продольно-поперечным возбужденней - асинхронизированными синхронными машинами,
Цель изобретения - повышение надежности работы асинхронизированной синхронной машины при авариях в преобразователе частоты.
На фиг, 1 представлена схема предлагаемого устройства; на фиг, 2 -« схема, поясняющая работу системы возбуждения,
Устройство для управления асинхронизированной синхронной машиной 1, подключенной первичной цепью по- фазно к сети 2 переменного тока, содержит датчик 3 частоты напряжения сети, вход которого соединен с первым входом формирователя 4 гармонических функций частоты скольжения второй вход которого соединен с выходом датчика 5 углового положения ротора, установленного на валу электрической мапшны 1, а выход формирователя 4 гармонических функций частоты скольжения соединен с первым входом преобразователя 6 координат. Выход датчика 7 частоты вращения ротора, установленного на валу электрической машины 1, соединен с первым входом регулятора 8 частоты вращения. Выход датчика 3 частоты напряжения сети соединен с пер- вЫм информационным входом первого селектора 9, управляюищй вход которого соединен с выходом первого дешифратора 10, Вход первого дешифратора 10 соединен с выходом блока 11 выявления отказов. Выход первого селектора 9 соединен с первым входо измерителя 12 угла, второй вход которого соединен с выходом датчика 5 углового положения ротора, а выход соединен с вторь м входом регулятора 8 частоты вращения. Выход регулятора 8 частоты вращения соединен с первым входом сумматора 13, Выходы датчиков продольной 14 и поперечной 15 составляющих тока вторичной цепи электрической машины 1 соединены с информационными входами соответственно второго 16 и третьего 17 селекторов, управляющие входы которых соединены с выходами второго дешифратора 18, а выходы соединены с входами регулятора 19 токов вто4429
5
0
5
0
5
0
5
ричной цепи электрической машины. Выход регулятора 19 токов вторичной цепи электрической машины 1 соединен с вторым входом сумматора 13, Выходы датчиков токов 20 и напряжений 21 первичной цепи электрической машины соединены соответственно с первым и вторым входами датчика 22 реактивной мощности. Выход датчика 22 реактивной мощности соединен с первым входом регулятора 23 реактивной мошдости, второй вход которого соединен с выходом задатчика 24 реактивной мощности. Выход регулятора 23 реактивной мощности соединен с третьим входом 25 преобразователя 6 координат. Выход преобразователя 6 координат сое;лд нен с входом управления преобразователя 26 частоты, включенного во вторичную цепь асинхронной синхронной машины 1,
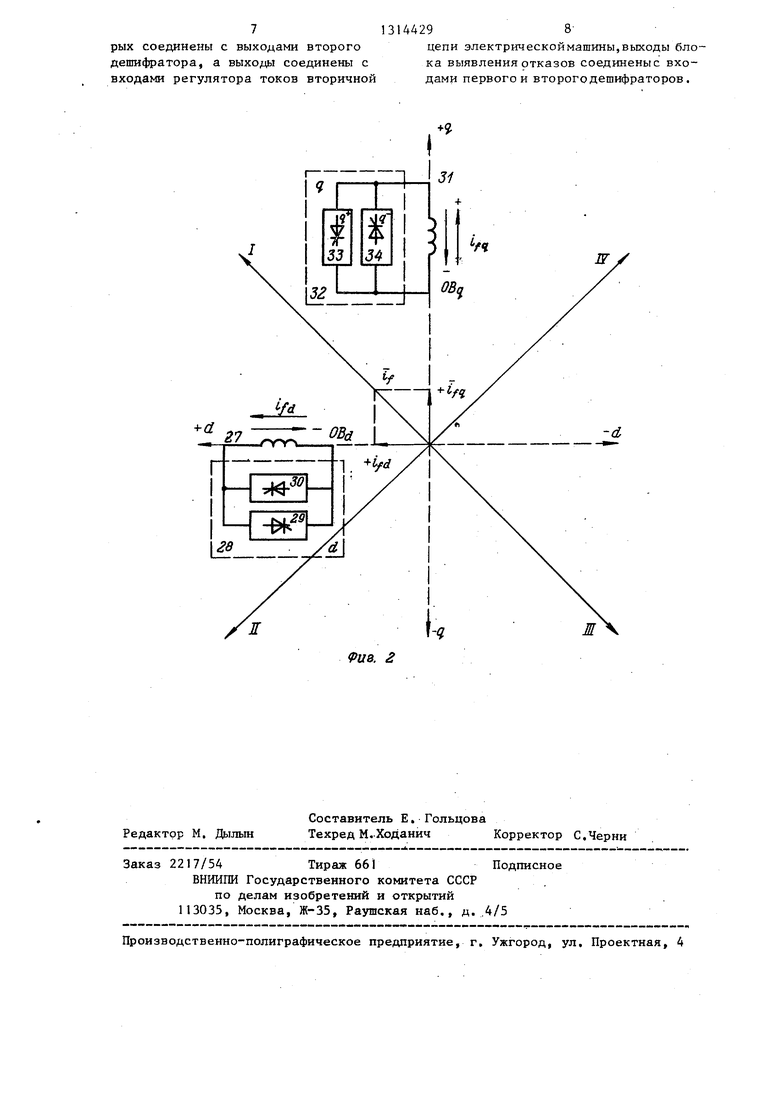
На фиг, 2 представлена упрощенная схема-диаграмма, поясняющая работу системы возбуждения, где обозначено 27 - обмотка возбуждения в оси d (обмотка d); 28 - фаза преобразователя 26 частоты (фаза d преобразователя частоты); 29 и 30 - мостовые выпрямители фазы d преобразователя 26 частоты 26 (d и dj ; 31 - обмотка возбуждения в оси q (обмотка q); 32 - фаза преобразователя 26 частоты (фаза q); 33 и 34 - мостовые выпрямители фазы q преобразователя 26 частоты (q и q ); I-IV - условно возможные варианты расположения в установившемся режиме вектора МДС ротора, создаваемого токами обмоток возбуждения d и q при различных сочетаниях в работе мостовых выпрямителей d+, d., q, q - фаз преобразователя 26 частоты,
В табл, щ иведены возможные варианты сочетания мостовых выпрямителей разных фаз преобразователя частоты.
Таблица 1313
в табл. 2 приведен алгоритм переключения входного опорного сигнала измерителя угла с помощью первого селектора в зависимости от варианта сочетания рабочих мостовых выпрямителей (и Un, -Uj, -Hyj - проекции вектора опорного напряжения положительного и отрицательного направлений в системе координат d , неподвижных в пространстве).
Таблица2
Вариант
Вход измерителя угла
Uoi
-и
/5 -%
Un
В табл. 3 приведен алгоритм переключения входного сигнала регулятора токов вторичной цепи с помощью второго и третьего селекторов в зависимости от варианта сочетания работающих мостовых выпрямителей ( +in , +if , ij(,, ifn проекции векторов токов вторичной цепи электрической мащины положительного и отрицательного направлений в системе координат d, q, связанных с ротором),
Таблица 3
Предлагаемое устройство работает следующим образом.
При первичной наладке и настройке за основной вариант совместной работы мостовых выпрямителей выбира
9 4
ется вариант I по табл. 1, т.е. когда в статическом режиме работы асин- хронизированной синхронной машины обмотку 27 по оси d возбуждает мостовой выпрямитель 29 (d) , а обмотку 3 по оси q возбуждает мостовой выпрямитель 33 (q ). Сигнал рассогласования по реактивной мощности формируется регулятором 23 реактивной мощности на постоянном токе путем сравнения сигнала задатчика 24 реактивной мощности и сигнала обратной связи по реактивной мощности, получаемого от датчика 22 реактивной мощности. Выходной сигнал регулятора 8 частоты вращения формируется в виде суммы сигналов, пропорциональных скольжению, которое равно разности сигнала с датчика 7 частоты вра- шения и постоянного сигнала, соответствующего синхронной частоте вращения и углу между вектором выходного напряжения датчика углового положения ротора 5 и вектором напряжения сети (опорного напряжения), полученным от датчика 3 частоты напряжения сети. Сигнал, пропорциональный углу, формируется в измерителе 12 угла, при этом положение вектора опорного напряжения, поступающего от датчика 3 частоты на вход измерителя 12 угла, может изменяться с помощью первого 9 селектора по алгоритму в табл. 2, в зависимости от
варианта сочетания работающих выпрямителей. В рассматриваемом случае (вариант I) на первый вход измерителя 12 угла поступает напряжение, положение вектора которого соответствует положительному направлению
вектора напряжения по оси d , т.е. +и. Сигналы от датчиков 14 и 15 токов вторичной цепи электрической машины и 1. поступают на входы 5 регулятора 19 токов вторичной цепи электрической машины в сочетании, соответствующих данным табл. 3, в зависимости от варианта сочетания работающих вьтрямителей. При этом
0
5
изменение сочетания входных сигналов регулятора 19 вторичных токов осуществляется вторым 16 и третьим 17 селекторами под воздействием выходных сигналов второго дешифратора 18. Сигнал регулятора 8 частоты вращения складывается на сумматоре 13 с сигналом peгyля fopa 19 токов вторичной цепи, а суммарный сигнаш
поступает совместно с сигналов регулятора 23 реактивной мощности на входы преобразователя 6 координат. Выходные сигналы преобразователя 6 координат поступают на управляющие входы преобразователя 26 частоты.
При возникновении аварии в работающих мостовых выпрямителях устройство работает следующим образом. Предположим, что вьшел из строя выпрямитель 29 (d) в обмотке 27 возбуждения (d, фиг, 2), Система защиты отключает данньш мостовой вьтря- митель, и по сигналу от блока 11 сигнализации отказов в работу вступает мостовой выпрямитель 30 (d). В дальнейшем рабочим вариантом сочетания мостовых выпрямителей будет являться согласно данным табл. 1 вариант IV, При этом должен произойти поворот ротора электрической машины. Для обеспечения установившегося режима работы по сигналу от блока 11 сигнализации отказов происходят соответствующие переключения в первом 9, втором 16 и третьем 17 селекторах в соответствии с алгоритмами, приведенными в табл, 2 и 3, т,е, на первый вход измерителя 12 угла с первого селектора 9 вместо сигнала +U поступает +Un, а на входы регулятора 19 токов вторичной цепи с второго 16 и третьего 17 селекторов вместо сигналов +Ц„, J поступают сигналы ii-. irj« дальнейшем принцип работы устройства управления не отличаются от указанных ,
Предлагаемое устройство может быть применено рля управления асин- хронизированными синхронными генераторами, кроме того, оно повьщгает надежность работы асинхронизирован- ной синхронной машины при авариях в преобразователе частоты за счет более полного использования особенностей системы возбуждения асинхронизи рованной синхронной машины путем реализации специального алгоритма для коррекции закона управления возбуждением асинхронизированной синхронной машины.
Формула изобретени
Устройство для управления асинхронизированной синхронной машиной, содержащее датчик частоты напряже
5
0
5
0
5
0
45
50
55
кия сети, выход которого соединен с входом формирователя гармонических функций частоты скольжения, второй вход которого соединен с выходом датчика углового положения ротора, установленного на валу электрической машины, а выход соединен с первым входом преобразователя координат, выход датчика частоты вращения ротора, установленного на валу электрической машины,, соединен с первым входом регулятора частоты вращения, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом регулятора токов вторичной цепи электрической машины, а выход соединен с вторым входом преобразователя координат, | датчики токов и напряжений первичной цепи электрической машины, выходы которых соединены соответственно с первым и вторым входами датчика реактивной мощности, выход которого соединен с первым входом регулятора реактивной мошдости, второй вход которого соединен с выходом задатчика реактивной мощности, а выход соединен с третьим входом преобразователя координат, выход которого соединен с входом управления преобразователя частоты, предназначенного для включения во вторичную цепь электрической машины и снабженного блоком выявления отказов, датчики продольной и поперечной составляющих тока вторичной цепи электрической машины, отличающ.ееся тем, что, .с целью повышения надежности работы при авариях в преобразователе частоты, в него дополнительно введены первый, второй и третий селекторы, измеритель угла, первый и второй дешифраторы, при этом информационный вход первого селектора соединен с выходом датчика частоты напряжения сети, управляющий вход соединен с выходом первого дешифратора, а выход соединен с первым входом измерителя угла, второй вход которого соединен с выходом датчика углового положения ротора, а выход соединен с вторым входом регулятора частоты вращения, выходы датчиков продольной и поперечной составляющих тока вторичной цепи электрической машины соединены с информационными входами соответственно второго и третьего селекторов, управляющие входы кото713144298
рых соединены с выходами второгоцепи электрическоймашины,выходы блодешифратора, а соединень: ска выявления отказов соединены с вховходами регулятора токов вторичнойдами первого и второгодешифраторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронизированной синхронной машиной | 1985 |
|
SU1288885A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU877765A1 |
| Система возбуждения асинхронизированной синхронной машины | 2021 |
|
RU2761246C1 |
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU904178A1 |
| Устройство для возбуждения асинхронизированной синхронной машины | 1987 |
|
SU1534744A1 |
| Устройство для связи двух энергосистем | 1980 |
|
SU955356A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
| Система электроснабжения узла нагрузки | 1981 |
|
SU1103324A1 |
| Способ регулирования возбуждения асинхронизированной синхронной машины и устройство для его осуществления | 1991 |
|
SU1838871A3 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1985 |
|
SU1304167A1 |
Изобретение относится к области управления электрическими машинами переменного тока с продольно-поперечным возбуждением (асинхронизирован- ными синхронными машинами). Целью изобретения является повьшзение надежности работы асинхронизированной синхронной машины при авариях в преобразователе частоты. С этой целью в устройство для управления асинхронизированной синхронной машиной, содержащее датчик частоты напряжения сети 3, формирователь гармонических функций частоты скольжения 4, датчик углового положения ротора 5, преобразователь координат 6, датчик частоты вращения ротора 7, регулятор частоты вращения 8, преобразователь частоты 26, дополнительно введены селекторы 9,16 и 17, дешифраторы 10 и 18, измеритель угла 12. 2 ил., табл. 3. 6 (Л
PU8. 2
Редактор М. Дылын
Составитель Е.-Гольцова
Техред М.Ходанич Корректор С,Черни
Заказ 2217/54 Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. .4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU877765A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
