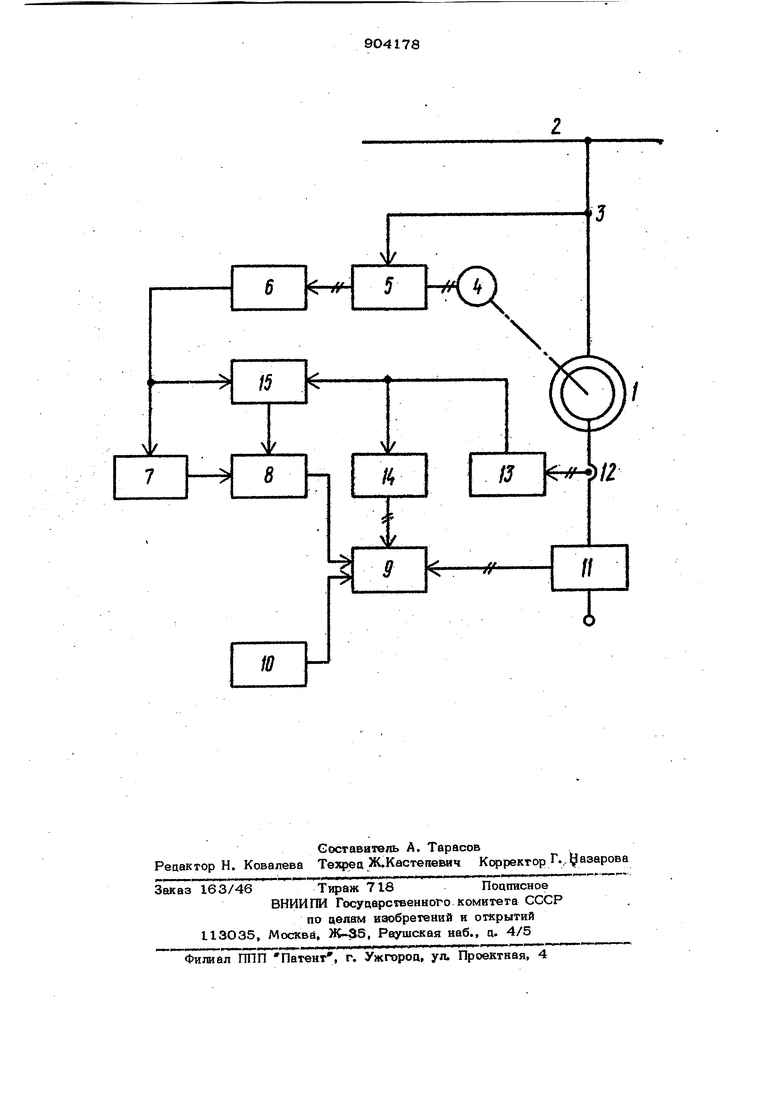
Изобретение относится к электротехнике, в частности, к устройствам управления асинхронизированной синхронной машиной, первичная обмотка которой подключена к сети переменного тока, а вторичная получает питание от регулируемого преобраэсюателя частоты. Оно может быть -использовано в электроэнергетике цля управления турбо- и гицрогенераторамн процольно-поп еяого возбужцения, а также в цругих отраслях промышленности, гце используются подобные электрические машины Известно устройство аля управления асинхронизированной С1гахронной машиной, содержащее преобразователь частоты, соециненный со вторичной цепью асинхронизированной синхронной машины, первичные обмотки которой поцключены к сети, цат чик тока и напряжения сети, датчик угло вого положения ротора, каналы регулирования частоты вращения и реактивной мощности LIT . Нецсстатком этого устройства является невозможность регулирования расгфеаеления токов по фазам вторичной обмотки при работе на синхронной частоте вращения. Наиболее близким к предлагаемому является устройство для управления асинхЛ ронизированной синхронной машиной, которое содержит датчик тока и напряжения первичной цепи, датчик фазных токов вторично цепи, датчик углового положения ротора, зацатчик частоты скольженяя, формирователь гармонических функций частоты скольжения, формирователь гармонических функций задания по углу, формирователь рассогласования по углу, регулятор частоты вращения, регулятор реактивной мощности, преобразователь координат и управляемый преобразователь частоты, включенный во вторичную цепь асинхронизированной синхронной машины, первичная цепь которой соединена с сетью переменного тока Г27 . В известном устройстве первый вхоц формирователя рассогласования по углу сое3 9 afeien с формировагелем гармонических ф П1Кцнй часгогы скольжения, который под ключен своими входами к датчикам углово положения ротора, тока и напряжения первичкой цепи. Второй вход формирователя рассогласования по углу соединен с формирователем гармонических функций задания по углу, вход которого подключен к выходу задатчика частоты скольжения. Выхоц формирователя рассогласования чё рез регулятор частоты вращения соеци шн с первым входом преобразователя коорцинат, второй вход которого соединен с выходом регулятора реактивной мощности, третий - с выходами формирователя гармонических функций задания по углу, а выход - со входом преобразователя частоты. Однако при использовании известного устройства в режиме, когда заданная частота вра1цения равна синхронной (за-i дана нулевая частота скольжения), зацоние на угловое положение ротора относительно вектора напряжения первично цепи остается- неизменным независимо от характера нагрузки в первичной цепи, что приводит к такому распределению токов вторичной цепи, которое не соответствует соотношению расчетных мощностей фаз вторичной обмотки. Это соотношение определяется конструкцией вторичной обмотки, и расчетные мощноети фаз могут быть, например, оцинако,выми при одинаковых фазных обмотках. В случае применения конструкции со спа бой поперечной обмоткой, которая рассчитана на работу только в переходном режиме, расчетная мощность поперечной обмотки для установившегося режима, практически, равна нулю. Несоответствие распределения токов в фазах вторичной обмотки соотнощению расчетных мощное тей фаз приводит к перегрузке одной из фаз обмотки и соответствующего блока силовой части преобрааовате; я частоты, что снижает надежность работы устройства. Цель изобретения - повыщение надежности регулирования обеспечения заданного распределения токов в фазах вторичной цепи мащины. Указанная цель достигается тем, что о устройство управления асинхронизиро- ванной синхронной мащиной, первичная цепь Которой снабжена выводами для подключения к электрической сети переменного тока, а вторичная - выводами для подключения к управляемому преобразователю частоты, содержащее датчик 84 углового положения ротора, выхоц когорого соединен с первым входом формирователя гармонических функций частоты кольжения, второй вход которого соединен с выходом датчика напряжения первичной цепи, датчик фазных токов вторичной цепи, преобразователь координат, первый .вход которого соединен с выходом регулятора реактивной мсадности, а второй вход - с выходом формирователя гармонических функций задания по углу, причем вьосод преобразователя координат подключен ко входу преобразователя частоты, введены блок вычисления угла поло- жения ротора, формирователь задания по углу, формирователь сигнала коррекции угла и сумматор, нричем вход бПока вычисления угла положения ротора соединен с выходом формирователя гармонических функций частоты скольжения, выход блока вычисления угла положения ротора соединен со входом регулятора частоты вращения и первым входом формирователя сигнала коррекции угла-, второй вход которого соединен с выходом формирователя задания по углу и со входом формирователя гармонических функций задания по угду, выход регулятора частоты вращения соединен с первым входом сумматора,- второй вход которого подключен к выходу формирователя сигнала коррекции угла, выход сумматора соединен с третьим входом преобразователя координат, а входы формирователя задания по углу соединены с выходами датчиков фазных токов вторичной цепи асиихронизированной синхронной мащины. На чертеже приведена блок-схема устройства;Устройство для управления асинхрониэированной синхронной мащиной 1, подключенной первичной цепью к сети 2 переменного тока, содержит датчик 3 напряжения первичной цепи и датчик 4 углового положения ротора, выходы которых подключены к формирователю 5 гармонических функций частоты скольжения. Выход формирователя 5 соединен со входом блока 6 вычисления угла положения ротора, выход которого подключен ко входу регулятора 7 частоты вращения, выход которого соединен с первым входом сумматора 8. Выход послецнего подключен к первому входу преобразователя 9 координат второй вход которого соединен с выходом регулятора 10 реактивной мощности, а выход преобразователя 9 координаг подключен ко входу преобразователя 11 частоты, включенного во вторичную цепь асинхронизированной синхронной машины I, Датчики 12 фазных гоков роiTopa .поцключены к входу формирователя 13 задания по углу, выход которого 6оецинен со входом формирователя 14 гармонических (}5гнкций задания ао углу, выхоа которого подключен к третьему входу преобразователя 9 координат. Кроме того, выход формирователя 13 соединен со вторым входом формирователя 15 сиг- нала Коррекции угла, первый вход рого подсоединен к выходу блока 6, а выход подключен ко второму входу сумматора 8. Блок 6 вычисления угла положения ротора представляет собой не- линейный преобразователь, реализующий одну из обратных тригонометрических функций OrOSitt или arccoS и позволяющий преобразовать сигналы гармонических функций угла в сигнал, пропорциональный величине угла. Формирователь 15 сигнала коррекции угла выполнен на основе интегросумматора, на входы которого поступают сравниваемые сигналы, один из которых инвер- тирован. Выходной сигнал является интегралом разности входных. Формирователь 13 задания по углу выполняется аналогично с учетом коэффициентов пропорциональности, используемых гфи сравнении фазных, токов, как описано ниже. Устройство работает следующим образом. В каналах регулирования частоты вращения и реактивной мощности формируются сигналы, которые являются заданиями на соответствующие проекции вектора тока вторичной цепи на оси синхронной системы координат, причем одна из осей направлена по вектору напряжения первичной цепи. В преобразователе 9 координат производится преобразование сигналов по каналам частоты вращения и реактивной мощности, сформированных в синхронной системе координат, в роторную систему Координат при помгаци сигналов гармонических функций задания на угловое положжение ротора, которые поступают с формирователя 14. Входные сигналы преобра зователя 9 координат являются задания- ми на фазные токи вторичной цепи мащиНЫ.1 и поступают на вход преобразователя .11 частоты. Сигнал регулятора 10 реактивной мощности формируется в функции реактив ной мощности первичной цепи и задания на величину этой мощности. Выходной сигнал канала регулирования частоты вращения, поступающий на преобразователь 9 координат с сумматора 8, складывается из двух составляющих. Первая составляющая формируется в регуляторе 7 частоты вращения в функции сигнала углового положения ротора и его производных. Сигнал углового положения ротора в синхронной системе координат поступает с блока 6 вычисления угла, где производится рселинейное преобразование :сигналов гармонических функций упомяну- .того угла, которые вьфабатываются в формирователе 5 гармонических ({ гикций частоты скольжения при совместной обработке сигнала датчика 3 напряжения первичной цепи, несущего информацию о частоте и фазе напряжения, и датчика 4 углового тюложения ротора. Вторая составляющая выходного сигнала канала регулирования частоты вращения, которая суммируется с первой составлякнцей в сумматоре 8, гфедназначена для коррекции углового положения ротора относительно вектора напряжения первичной цепи, с целью установления требуемого соотношения токов в фазах вторичной обмотки мащины I. Сигналы фазных токов поступают с датчиков 12 в формирсшатель 13 задания по углу, выходной сигнал которого формируется как временный интеграл разности величин, пропорциональных токам. Последний сигнал поступает на формирователь 15 сигнала коррекции по углу, где сравнивается с сигналом углового положения ротора, поступающим с блока 6. Разность указанных сигналов интегрируется по времени и поступает на сумматор 8 в качестве второй составляющей выходного сигнала канала регулирования частоты вращения. Кроме того, сигнал с формирователя 13 поступает в формирователь 14 гармонических 4Ункций задания по углу. Если по завершении переходного процесса, связанного с изменением режима работы или каким-либо другим возмущением, распределение токов в фазах вторичной цепи отличается от требуемого, то выходной сигнал формирователя 13 задания по углу начинает изменяться, что вызьшает соответствующее изменение сигнала коррекции угла на выходе формирователя 15 и результирующего сигнала в Канале регулирования частоты вращения, в результате чего изменяется угловое . положение ротора относительно вектора напряжения первичной цепи и соотношение , токов в фазах вторичной обмотки. Описанвый процесс продолжается ао тех пор, пока не устанавливается зааанное соотно шение токов в фазах вторичной обмотки. Требуемое соотношение указанных токов учитывается тем, что сигналы фаэных токов сравниваются между собой с различными коэф4тхиентамн, причем соотношение Коэффициентов обратно nponop-s ционально требуемому соотношению токов Так, например, если требуется равномерное распределение токов по фазам, то коэффициенты пропорциональности одинаковы. При использовании слабой поперечной обмотки коэффициент пропорционал ; ности для тока основной обмотки равня-i ется нулю.
Таким образом, предлагаемое устройство для управления асинхронизнрованной синхронной машиной обеспечивает задан ное распределение токов в фазах вторичч ной обмотки, что позволяет исключить перегрузку вторичных силовых цепей и установившемся режиме и повысить надежность регулиров1ания и работы системы в целом.
Формула из. обретения
Устройство для управления асинхронизированной синхронной MauniHotift первичная цепь которой снабжена выводами для подключения к электрической сети переменного тока, а вторичная - выводами для подключения к управляемому преобразователю частоты, содержащее датчик углового положения ротора, выхо которого соединен с первым входом формирователя гармонических 4ункций частоты скольжения, второй вход которого соединен с выходом датчика напряжения первичной цепи, датчик фазных токов вторичной цепи, преобразователь координат.
ной цепи машины, введены блок вычисления угла положения ротора, формирователь задания по углу, формирователь сигнала коррекции угла и сумматор, причем
вход блока вь1числения угла положения ротора соединен с выходом формирователя гармонических функций частоты скольжения, выход блока вычисления угла положения ротора соединен со входом регулятора частоты вращения и первым входом формирователя сигнала коррекции угла, второй вход которого соединен с выходом формирователя задания по углу и со входом формирователя гармонических
функций задания по углу, выход регулятора частоты вращения соединен с первым входом сумматора, второй вход которого подключен к выходу формирователя сигнала коррекции угла, выход сумматора
соединен с третьим входом преобразователя координат, а входы формирователя задания по углу соединены с выходами датчиков фазных токов вторичной цепи асннхронизированной синхронной машины.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство CCGP по заявке N 2528732/О7,
кл. Н 02 Р 7/42, 1077.
2.Авторское свидетельство СССР № 794701, кл. Н 02 Р 7/42, 31.07.79. первый вход которого соединен с выходами регулятора реактивной мощности, а второй вход - с выходом формирователя гармонических функций г(адания по ур- лу, причем выход преобразователя координат подключен ко входу преобразователя частоты, отличающееся тем, что, с целью повышения надежности регулирования путем обеспечения заданного распределения токов в фазах вторич
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU877765A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1984 |
|
SU1314429A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1985 |
|
SU1288885A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1985 |
|
SU1304167A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1986 |
|
SU1399885A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1988 |
|
SU1534747A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2189104C2 |
| Способ регулирования возбуждения асинхронизированной синхронной машины и устройство для его осуществления | 1991 |
|
SU1838871A3 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |