натного преобразователя в цепи управляющих входов преобразователя частоты, входы обратных связей быстродействующих регуляторов потокосцеплений ротора по оси oL и по оси ft соединены с соответствующими выходами координатного преобразователя для определения составляющих потокосцеплений ротора АСМ по осям о и и , выходы дифференцирующих звеньев соединены с входами компенсирующих связей соответствующих быстродействующих регуляторов потокосцеплений по осям о/ и А, вход задания быстродействующего регулятора потокосцепления по оси oi соединен с выходом регулятора составляющей напряжения по оси , а вход задания быстродействующего регулятора потокосцепления по оси р, соединен с выходом регулятора составляющей напряжения по оси о, входы обратных связейрегуляторов составляющих напряжения статора АСМ по осям oi исоединены с соответствующими выходами координатного преобразователя для составляющих напряжения статора АСМ по осям oi и /i , вход которого соединен с выходом датчика фазных напряжений статора и выходом блока опре.деления частоты вращения системы координат оС-д, и ее углового положения, вход регулятора составляющей напряжения статора АСМ по оси /i соединен с выходом регулятора частоты, а вход регулятора составляющей напряжения статора АСМ по оси ci - с выходом нелинейного элемента, вход которого соединен с выходом суммирующего элемента, один вход которого соединен с выходом множительного элемен-та, вход которого соединен с выходом задатчика модуля напряжения, а второ вход суммирующего элемента соединен через множительный элемент с выходом по оси f координатного преобразователя для определения составляющих напряжения по осям о. и /i , вход обратной связи регулятора частоты соединен с выходом датчика колебаний частоты, входы которого соединены с выходом координатного преобразователя для определения составляющих напряжения статора АСМ по осям о и /j и с выходом блока определения частоты вращения системы координат oi -ft, вход которого соединен с выходом датчика фазных напряжений на шинах основной питающей системы, вход задания регулятора частоты через фильтр соединен с выходом дополнительного регулятора потокосцеплений ротора по оси oi , вход обратной связи последнего регулятора соединей с выходом для оси d координатного преобразователя для определения составляющих потокосцепления ротора АСМ по осям oi и /3 , а вход задания этого регулятора соединен с выходом регулятора скорости вращения ротора машины,вход задания которого соединен, с выгСодом задатчика скорости, а вход обратной связи - с блоком определения частоты вращения ротора и его углового положения в системе координат о -/з, выход последнего соединен с координатным преобразователем в цепи управляющих входов преобразователя частоты и с координатным преобразователем для получения составляющих потокосцепления ротора АСМ по осям oi н р, , вход соединен с выходом датчика импульсов который установлен на валу АСМ, и выходом блока для определения частот вращения системы координат оС-д и ее углового положения, а выходы датчика скольжения соединены с выходами блока определения частоты вращения системы координатой- и ее углового положения и с выходом блока определения частоты вращения ротора и его углового положения в системе координат об -р.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1975 |
|
SU699644A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1980 |
|
SU1035766A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Регулируемый электропривод с асинхронизированным синхронным двигателем | 1972 |
|
SU490247A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Энергосистема | 1979 |
|
SU847434A1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU615583A2 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ УЗЛА НАГРУЗКИ, содержащая основной источник питалия, включенный на шины нагрузки, асинхронизированную синхронную машину, трехфазный статор,которой включен на- шины, а трехфазный или двухфазный рртор с маховиком подключен через преобразователь частоты к источнику питания, дз/шки фаз статора и .ротора, датчики-фазовых напряжений статора, координатный преобразователь в цепи управляющих входов преобразователя частоты, координатный преобразователь для определения составляющих потокосцепления ротора асинхронизированной синхронной машины (АСМ) по осям oi и /5 и фильтры, . при зтом выход координатного преобра-зователя в цепи управляющих входов преобразователя частоты соединен с управляющим входом преобразователя частоты, входы координатного преобразователя для определения составляющих потокосцепления ротора АСМ по осям oi. и Ь соединены с датчиками фазных токов статора и ротора АСМ, а выходы через множительные элементы соединены со входами дифференцирующи с звеньев, причем вторые входы множительных элементов подключены к . выходу датчика скольжения, отличающаяся тем, что, с целью повьш1ения надежности функционирования системы электроснабжения, в нее вве-. ден датчик фазовых напряжений на шинах основной питающей системы, координатный преобразователь для определения составляющих напряжения статора АСМ по. осям oi- и датчик частоты напряжения на шинах АСМ, блок oпpeдieлeния частоты вращения системы (Л координат oi -(Ь и ее углового положения, блок определения частоты вращения ротора и его углового положения 8. в сист-еме координат d -/j, датчик им- . С пульсов, быстродействующий регулятор потокосцепления ротора по оси /i, быстродействующий регулятор потоко-. О 00 &д 0 4 сцепления ротора по оси 61, датчик колебаний частоты на шинах электро- . приемников и статора АСМ, регуляторы составляющих напряжения АСМ по осям oi и /i , регулятор частоты напряжения на щинах нагрузки и статора АСМ, суммирующий элемент, задатчик. модуля напряжения на шинах нагрузки и статора АСМ, дополнительный регулятор потокосцепления ротора по оси d , ЖСрегулятор скорости вращения АСМ, задатчик Скорости вращения ротора АСМ, нелинейный элемент, при этом выходы быстродействующих регуляторов потокосцепленйй ротора по осям ct и через фильтры соединены с входом коорди
I
Изобретение относится к группе устройств, применяемых в электроэнергетике для решения проблем повыщения надежности функционирования
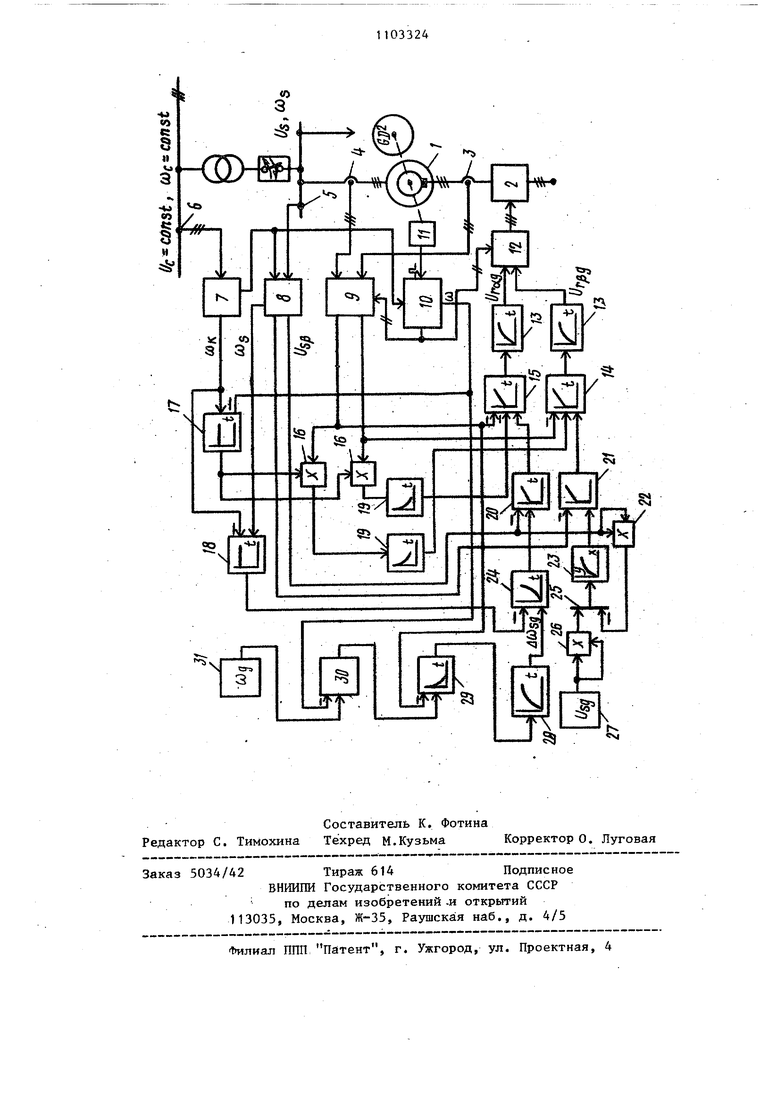
электрических систем. К числу указанных проблем относится и проблема обеспечения бесперебойности электроснабжения узлов нагрузки энергосистемы и узлов нагрузки промьшшенных предприятий. В современной промышленности можно указать целый, ряд предприятий и отдельных технологических процессов, для которых даже кратковременный перерыв электроснабжения влечет за собой значительные материальные потери. Вместе с тем, указанные перерывы питания могут воз никнуть и действительно возникают в результате аварийных коммутаций в энергосистеме или в системе электроснабжения промьшшенного предприятия вызывая существенный экономический ущерб. Современньй уровень электромашино строения, преобразовательной техники и техники регулирования позволяет соз дать устройство,способное предотврат перерыв в электроснабжении узла нагрузки, приняв на себя роль источник электрической энергии на время отклю чения узла от основной питающей системы. Известно устройство, включающее в себя турбоагрегат, линии электропере дач, асинхронизированную синхронную машину с маховиком, регулируемые источники питания фаз ротора, датчики углового положения ротора, тока рото ра асинхронизированной синхронной ма шиной (АСМ), тока статора АСМ, скорости АСМ, напряжения статора АСМ, частоты l . АСМ управляется с помощью регулятора АСМ, регулятора частоты, регуля тора скорости. Это устройство предназначено для компенсации, т.е. покрытия кратковременно дефицита элект роэнергии в узле нагрузки, когда узел еще сохраняет связь с энергосистемой. При полном отключении узла нагрузки от основного источника пита ния данное устройство не способно обеспечить электроснабжение узла нагрузки. Наиболее близким к изобретению является система электроснабжения узла нагрузки, представляющая собой быстродействующую систему с АСМ для компенсации (т.е. подавления) колебаний частоты и напряжения в узле нагрузки при толчках активной и реак тивной мощности электроприемников, включенным на шины, соединенные с основным источником, к которым присоединен и статорАСМ с маховиком. Фазный ротор АСМ питается через преобразователь частоты от источника питания. АСМ снабжена системой автоматического регулирования, обеспечивающей частотное управление машиной со стороны ротора через управляющие входы преобразователя частоты. Эти входы через координатньм преобразователь и фильтры связаны с выходами регуляторов активного и реактивного тока статора АСМ. Входы обратных связей указанных регуляторов подсоединены к выходам блока преобразования переменных, осуществляющего преобразование фазовых токов статора АСМ в активную и реактивную составляющие, входы которого подключены к датчикам фазовых токов и напряжений статора. Входы компенсации внутренних обратных связей АСМ указанных регуляторов присоединены через дифференцирующие звенья и множительные элементы к координатному преобразователю для определения потокосцеплений ротора по осям 0 и р и к датчику скольжения статора. Входы координатного преобразователя для определения составляющих потокосцеплений ротора по осям 0 и /i соединены с датчиками фазовых токов ротора и статора. Вход задания регулятора активного тока статора присоединен к выходу регулятора скорости АСМ, а вход задания регулятора реактивного тока статора присоединен к выходу регулятора модуля напряжения питающей сети. Входы обратных связей регулятора модуля напряжения питающей сети и регулятора скорости соединены с соответствующими датчиками. Регулятор скорости имеет дополнительный вход, соединенный с выходом датчика активного тока электроприемников, присоединенных параллельно статору АСМ к узлу нагрузки 2. По своему функциональному назначению прототип представляет собой систему с АСМ, обеспечивающую быстродействующую компенсацию толчков активной и реактивной нагрузок электроприемников узла. Эти толчки порождают соответствующие им колебания частоты напряжения питающей сети, снижающие качество электрической энергии в узле. Колебания частоты питающей сети имеют место в промежутках времени, когд« изменяется режим работы электроприемников, т.е. когда их активные токи, например, нарастают. В эти промежутки времени описанная система с АСМ 2 берет на себя роль дополнительного генера тора электрической энергии, облегчаю щего работу основной питающей систе мы. Устройство прототипа позволяет развить это его свойство до такого уровня, когда система с АСМ возьмет на себя полностью роль источника электрической энергии на время крат ковременного отключения от узла основной питающей системы. Целью изобретения является повышение надежности функционирования системы электроснабжения узла нагру ки путем обеспечения питания узла электрической энергии требуемого качества от системы с АСМ на время кратковременного отключения узла от основной питающей системы. Указанная цепь достигается тем, что в систему электроснабжения узла нагрузки, содержащую основной источник питания, включенный на шины нагрузки, асинхронизированную синхронную машину, трехфазный статор, который включен на шины, а трехфазный . или двухфазньй ротор с маховиком под ключен через преобразователь частоты к источнику питания, датчики фаз статора и ротора, датчики фазовых на пряжений статора, координатный преобразователь в цепи управляющих входов преобразователя частоты, координатный преобразователь для определения составляющих потокосцепления рот ра АСМ по осям 0 и р и фильтры, при этом выход координатного преобразова теля в цепи управляющих входов преобразователя частоты соединен с управляющим входом преобразователя частоты, входы координатного преобра зователя для определения составляющих потокосцепления ротора АСМ по осям oi и р соединены с датчиками фазных токов статора и ротора АСМ, а выходы через множительные элементы соединены со входами дифференцирующих звеньев, причем вторые входы множительных элементов подключены к выходу датчика скольжения, введен датчик фазовых напряжений на шинах основной питающей системы, координат ный преобразователь для определения составляющих напряжения статора АСМ йр осям pi - р, и датчик частоты напря жения на шинах АСМ, блок определения частоты вращения системы координат d-/ и ее углового положения, блок определения частоты вращения ротора и его углового положения в системе координат о/, -ft, датчик импульсов, быстродействующий регулятор потокосцепления ротора по оси л, быстродействующий регулятор, потокосцепления ротора по оси 0, датчик колебаний частоты на шинах электроприемников и статора АСМ, регуляторы составляющих напряжения АСМ по осям oi- и , регулятор частоты напряжения на шинах нагрузки и статора АСМ, суммирующий элемент, задатчик модуля напряжения на шинах нагрузки и статора АСМ, дополнительный рег/лятор потокосцепления ротора по оси 0, ЖС-регу- лятор скорости вращения АСМ, задатчик скорости вращения ротора АСМ, нелинейный элемент, при этом вькоды быстродействуюищх регуляторов потокосцеплений ротора по осям о( и /з через фильтры соединены с входом координатного преобразователя в цепи управляющих входов преобразователя частоты, входы обратных связей быстродействующих регуляторов потокосцеплений ротора по оси сС и по оси J} соединены с соответствующими выходами координатного преобразователя для определения составляющих потокосцеплений ротора АСМ по осям ot и |i , выходы дифференцирующих звеньев соединены с входами компенсирующих связей соответствующих быстродействуюш 1х регуляторов потокосцеплений по осям ci и в , вход задания быстродействующего регулятора цотокосцепления по оси ot соединен с выходом регулятора составляющей напряжения по оси р , а вход задания быстродействующего регулятора составляющего напряжения по оси /3 , соединен с выходом регулятора составляющей напряжения по оси oi , входы обратных связей регуляторов составляющих напряжения статора АСМ по осям ot и /3 соединены с соответствующими выходами координатного преобразователя для составляющих напряжения статора АСМ по осям о( и /J , вход которого соединен с выходом датчика фазных напряжений статора и выходом блока определения частоты вращения системы координат с{ - р и ее углового положения, вход регулятора составляющей напряжения статора АСМ по оси /} соединен с выходом регулятора частоты, а вход регулятора 7.11 составляющей напряжения статора АСМ по оси оС - с выходом нелинейного элемента, вход которого соединен с выходом суммирующего элемента, один вход которого соединен с выходом множительного элемента, вход которого соединен с вьжодом задатчика модуля напряжения, а второй вход суммирующего элемента соединен через множительный элемент с выходом для . оси jb координатного преобразователя для определения составляющих напряжения по осям ot и , вход обратной связи регулятора частоты соединен с выходом датчика колебаний частоты, входы которого соединены с выходом координатного преобрагзователя для определения составляющих напряжения статора АСМ поосямо и/4ис выходом блока определения частоты вращеНИН системы координат oi-/i, вход кото рого соединен с выходом датчика фазных напряжений на шинах основной питающей системы, вход задания регулятора частоты через фильтр соединен с выходом дополнительного регулятора потокосцеплений ротора по оси d , вход обратной связи последнего регулятора соединен с выходом для оси 0 координатного преобразователя для определения составляющих потокосцепления ротора АСМ по осям oi и , а вход задания этого регулятора соединен с выходом регулятора скорости вращения ротора машины, вход задания которого соединен с выходом задатчик скорости, а вход обратной связи - с блоком определения частоты вращения ротора и его углового положения в системе координат ci-/5, выход последнего соединен с координатным преобра зователем в цепи управляющих входов преобразователя частот :- и с -координатным преобразователем для получени составляющих потокосцепления ротора АСМ по осям oi и р , вход соединение выходом датчика импульсов, который установлен на валу АСМ, и выходом блока для определения частоты вращения системы координат ot - /J и ее углового положения, а входы датчика скольжения соединены с выходами блока определения частоты вращения системы координат и ее углового положения и с выходом блока определе ния частоты вращения ротора и его углового положения в системе координат oL-/b. 4 На чертеже приведена схема системы электроснабжения. Система содержит асинхронизированную синхронную машину 1, ротор которой сочленен с маховиком; преобразователь частоты 2, например тиристорный; датчики 3 фазовых токов ротора, датчики 4 фазовых токов статора; датчики 5 фазовых напряжений статора д „ ц,,„ параллельно присоединенных электроприемников, кратковременно (на время 4tgy ) отключаемых от основной питающей системы; датчики 6 фазовых напряжений на шинах основной питающей системы, частоты которых определяет скорость вращения uj системы координат cL-jb, использованной для построения системы регулирования АСМ; блок 7 определения частоты О) вращения системы координат ot- /3 и углового положения (sin -г , COST); - к.„ . k координатный преобразователь 8 для определения составляющих напряжения статора АСМ по осям oi и /i и датчик частоты ш напряжения на шинах АСМ; координатный преобразователь 9 для определения составляющих потокосцепления ротора АСМ по осям о( и j. ; Q определения 10 частоты вращения ротора и его углового положения (sin j , cosj) в системе координат . датчик 11 импульсов, расположен„ д(.,,. координатный преобразователь 12 для вычисления управляющих напряжений фаз преобразоватеj частоты; фильтры 13 с постоянной времени Т„, ограничивающие скорость протекания процессов регулирования частоты UJ-, и напряжения Uj нч -чнах электроприемников; быстроделстпуюицш регулятор 14 потокосцеплений ротора по оси /i ; быстродействующий регулятор 15 потокосцеплений ротора по оси d; множительные элементы 16; датчик скольжения ротора 17 по отно вращающейся системе координат; датчик колебаний частоты 18 на шинах электроприемников и статора АСМ; дифференцирующие звенья 19 в контурах компенсации ЭДС скольжения; регулятор составляющей напряжения 20 по оси /ь ; регулятор 21 составляющей напряжения статора по оси ot ; множительный элемент 22; нелинейный элемент 23 типа Y VX; р егулятор час,тоты 24 напряжения на шинах нагрузки и статора АСМ; суммирующий элемент 25; множительный элемент 26; задатчик 9 модуля 27 напряжения на шинах нагру ки и статора АСМ; фильтр 28 с пост ной времени Т Т, ограничивающий скорость протекания процессов регу лирования скорости вращения ротора АСМ; дополнительный регулятор 29 потокосцеплений ротора по ocH.d ; ЖС-регулятор скорости 30 вращения ротора АСМ, задатчик 31 скоростей АС Примененные регулятора имеют ел дующие передаточные функции: регуляторы (14), (15) потокосцеп лений ротора IrV регуляторы (20), (21), составляющих напряжений статора -- .12. (2) ir. Wp,(p) регулятор (24) частоты напряжения статора WpdU)/P 8Fr второй регулятор (29) потокосцеплеНИИ ротора по оси d х )- ,, 2т() т опреде( ляются параметрами АСМ, Тй ( V 1 (0,002-0,005)с. Все указанные передаточные функции являютс стандартными и реализуются щироко используемыми звеньями. Регулятор скорости 30 - так называемьй ЖС-регулятор описывается операторным ура нением следующего вида: 6 1 (2т|р 2Т4Р+1) lU)-u) где Х„ (р) - сигнал на выходе регувыхлятора скорости,(х 0,25-1. Задание регулятора составляющей напряжения статора АСМ по оси oL фор мируется с помощью элементов 22; 23,25,26. Такое формирование задани вызвано необходимостью поддержания модуля напряжения на шинах нагрузки и статора АСМ на уровне задания. Для поддержания модуля указанного напряжения задание регулятора 21 4 формируется из сигнала составляющей напряжения статора АСМ по оси л и сигнала задания модуля напряжения на шинах нагрузки и статора АСМ. Работа быстродействующей системы в АСМ для компенсации кратковременных перерывов электроснабжения узлов нагрузки происходят следующим образом. В статическом режиме работы системы, когда Up const, ш const, нагр const, const, основной источник обеспечивает поддержание частоты на шинах нагрузки на уровне задания, T.e.U/j Шс (л ЬУ и покрывает активную мощность нагрузки, т.е. активная мощность АСМ Рд 0. Реактивная мощность нагрузки может распределяться по разному между основным источником и АСМ в зависимости от соотношения напряжений U и 0, При этом за счет работы регулятора напряжения 2tj регулятора потокосцеплений 14 будет выполняться условие и 5 - 5в- можно установить такой режим, когда, например, реактивная мощность нагрузки покрьшается только реактивной мощностью АСМ, а реактивная мощность основного источника равна нулю. При нулевой активной мощности АСМ скорость его вращения за счет действия регулятора скорости 30, регуляторов частоты 24, напряжения 20 и потокосцеплений 15 поддерживается на уровне задания, т.е. ly w. Динамика предлагаемого устройства определяется взаимодействием всех рассмотренных элементов и выявляется в двух основных режимах. Первый динамический режим соответствует нормальной системе электроснабжения, когда электроприемники питаются от основного источника при Uj. const, Шр const, но Р(.(гр var, QHQPP var, т.е. мощность нагрузки изменяется с течением времени, вызывая колебания частоты ШдИ модуля Ug напряжения на шинах нагрузки. Система с АСМ обеспечивает компенсацию, т.е. подавление этих колебаний. При этом свойства предлагаемого устройства практически не отличаются от свойств прототипа. В связи с этим указанный режим более подробно не рассматривается. Второй динамический режим соответтвует аварийной ситуации, когда осовной источник питания на время откл отключается от шин нагрузки. В этой ситуации прототип оказываетс неработоспособным, в то время как предлагаемое устройство обеспечивает нормальное электроснабжение нагрузки В этом режиме АС.М работает как генератор, предотвращая перерыв в питании нагрузки. Система в этом режиме работает следующим образом. Генерирование АСМ активной энергии сопровождается снижением скорое ти вращения ее ротора. Информация о снижении скорости.поступает от блока 10 по линии обратной связи на регулятор скорости 30, который действует таким образом, чтобы обеспечить под,держание скорости вращения на уровне задания uj. Однако быстродействие контура регулирования скорости с регулятором 30 и контура регулирован потокосцеплений с регулятором 29 и фильтром 28 таково, что даже при наличии значительного понижения скорости АСМ за время сигнал задания на входе регулятора частоты 24 практически не изменяется, т.е. остается близким к нулю, что соответствует заданию поддержания частоты на щинах нагрузки на уровне lu, поступающего на датчик 18 от блока 7, включенного на шины основного источника. В момент отключения основного источника от шин нагрузки частоты Шд и напряжение Ug начинают изменяться. Эта информация от датчика 18 и преобразователя 8 по линиям обратной связи поступает на регулятор частоты 24 и регулятор 21 напряжения статора по оси oL . Как уже отмечалось, на вход регулятора частоты 24 подается сигнал, соответствующий заданию UK . Этот сигнал отрабатывается быстродействующим контуром регулирования частоты через регулятор 20 . напряжения статора по оси /} и быстродействующий регулятор 15 потокосцеплений ротора по оси d , Контуры регулирования астатические,так что на шинах нагрузки при отключенном основном источнике питания поддерживается частота этом Од вектор напряжения 6 на несколько градусов отстает от вектора напряже ния 0(-. Модуль напряжения U5 поддерживается на уровне задания Ujg. регу1412 лятором 21 посредством регулятора потокосцеплений 14. Как уже отмечалось, за время Л,., векторы и и Од за счет работы системы регулирования почти не расходятся, поэтому подключение основного источника питания происходит синхронно с АСМ и частота и модуль напряжения на шинах -нагрузки вновь начинают поддерживаться основным источником. После его включения начинается вторая стадия протекания переходного процесса, связанная с восстановлением скорости вращения ротора АСМ до уровня задания uj. Это восстановление происходит под действием регулятора 30 за счет энергии основного источника питания узла нагрузки. Расчет переходного процесса в системе при отключении основного источника питания от шин нагрузки с последующим его включением показывает следующее: в течение первых 0,03-0,04 с после о.тключения напряжение на шинах несколько отличается от синусоидального, а в дальнейшем, вплоть До восстановления питания от основного ис- точника, устанавливается синусоидальным весьма высокого качества (отклонение амплитуды от уровня задания не превосходит 0,05%, отклонение частоты - не более 0,005 Гц); при подключении шин нагрузки к основному источнику питания заметное (до 10%) отклонение амплитуды напряжения наблюдается лишь на первом периоде, после чего колебания амплитуды напряжения не превосходят 0,1%, а частоты - 0,03 Гц. Напряжение окончательно устанавливается на уровне задания, как по модулю, так и по частоте после завершения переходного процесса в АСМ. После отключения основного источника АСМ, работая в генераторном режиме, обеспечивает питание нагрузки электроэнергией. Скорость вращения ее ротора при этом понижается. После подключения шин нагрузки к основному источнику в АСМ происходит процесс постепенного восстановления скорости до уровня задания. Таким образом, система позволяет повысить надежность электроснабжения при перерывах в питании.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Энергосистема | 1979 |
|
SU847434A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1975 |
|
SU699644A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
