11
Изобретение относится к машиностроению и может быть использовано при создании электромагнитных молотков ,и бетоноломов.
Цель изобретения - повьшение надежности путем исключения ударов бойка и катушки рабочего хода по корпусу машины.
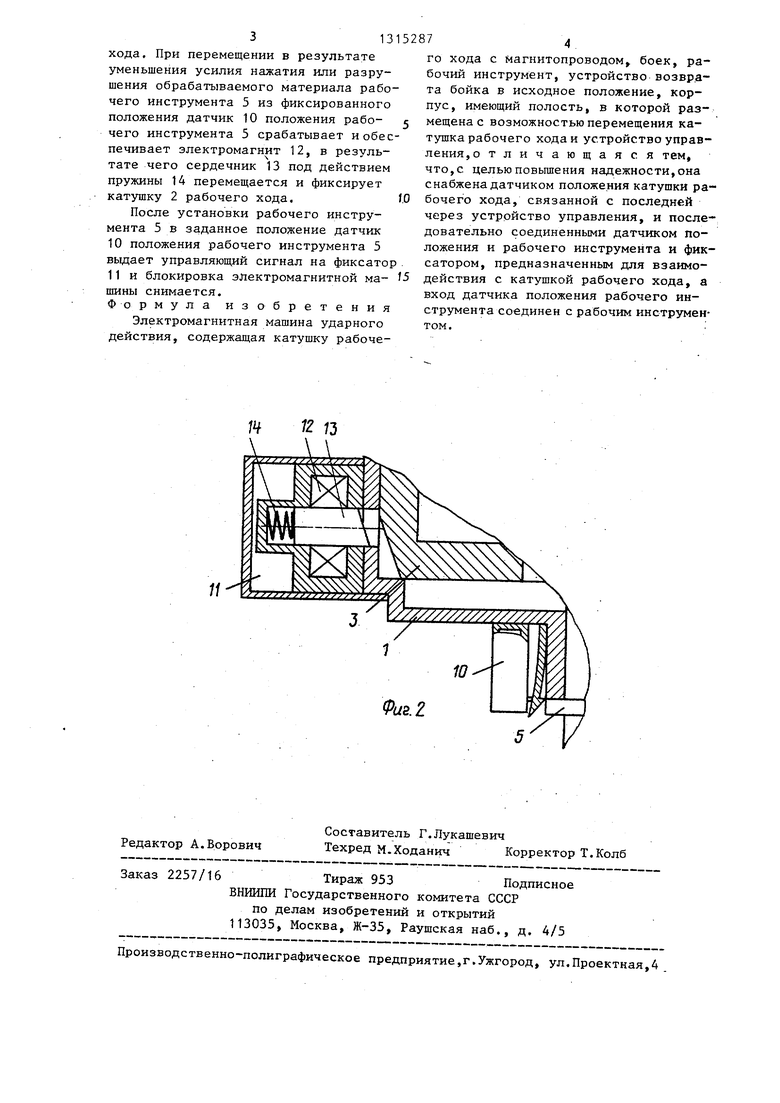
На фиг.1 схематично изображена машина ударного ействия; на фиг. 2 - пример выполнения датчика положения рабочего инструмента и фиксатора катушки рабочего хода.
Электромагнитная машина ударного действия содержит корпус 1, катушку 2 рабочего хода с магнитопроводом 3, боек 4, рабочий инструмент 5, устройство 6 возврата бойка в исходное положение, выполненное в виде катушки холостого хода, полость 7, в которой размещена с возможностью перемещения катушка 2 рабочего хода, датчик 8. положения катушки 2 рабочего хода, устройство. 9 управления, связывающее катушку 2 рабочего хода с датчиком 8 положения катушки 2 рабочего хода, датчик 10 положения рабочего инструмента 5, фиксатор 11. При этом датчик 10 положения рабочего инструмента 5 последовательно соединен с фиксатором 11, предназначен- Hbw для взаимодействия с катушкой 2 рабочего хода, а вход датчика 10 положения рабочего инструмента 5 соединен с рабочим инструментом -5. При этом фиксатор 11 может быть выполнен в виде электромагнита 12 (фиг.2), снабженного сердечником 13, подпружиненным пружиной 14, а в качестве датчика 10 положения рабочего инструмента 5 может быть использован конеч ный выключатель.
Электромагнитная машина ударного действия работает следующим образом.
В исходном состоянии Kopiryc 1 электромагнитной машины ударного действия (фиг.1) располагают вертикально, в результате чего катушка 2 рабочего хода опускается вниз и датчик 8 положения катушки 2 рабочего хода срабатывает. С помощью устройства 6 возврата бойка в исходное положение боек 4 устанавливается в исходное положение, вследствие чего в катушке 2 рабочего хода появляется начальный рабочий зазор. При приложении осевого усилия к корпусу 1 электромагнитной машины рабочий инструмент 5 за72
нимает исходное положение, датчик 10 положения рабочего инструмента 5 срабатывает и фиксатор 11 расфиксирует катушку 2 рабочего хода. При подаче с помощью устройства 9 управления силового импульса в катушку 2 рабочего хода, боек 4 начинает перемещаться в сторону инструмента 5, а катушка 2 рабочего хода
за счет сил реакции - в противоположную сторону. После нанесения бойком
4удара по рабочему инструменту 5, возврата бойка 4 с помощью устройства 6 в исходное положение и опускания под действием сил тяжести катушки 2 рабочего хода до уровня, обус- ловленного датчиком 8 положения катушки 2 рабочего хода, цикл работы электромагнитной машины ударного
действия повторяется.
При недопустимом перемещении рабочего инструмента 5, в результате чего боек 4 может нанести удары не по хвостовику рабочего инструмента
5, а по корпусу 1 электромагнитной машины, датчик 10 положения рабочего инструмента 5 с помощью фиксатора
11фиксирует катушку 2 рабочего хода и не позволяет ей опускаться до
уровня датчика 8 положения катушки 2 рабочего хода.
Это ликвидирует удары по корпусу ( 1 электромагнитной машины как бойка 4, так и катушки 2 рабочего хода.
При возвращении рабочего инструмента
5в исходное положение датчик 10 положения рабочего инструмента 5 срабатывает, а фиксатор 11 расфиксирует катушку 2 рабочего хода, которая начинает опускаться, и работа электромагнитной машины протекает аналогично описанному.
На фиг.2 приведен пример реализации датчика 10 положения рабочего инструмента 5 и фиксатора 11. В исходном состоянии, при отсутствии рабочего инструмента 5, электромагнит
12отключен и середечник 13 под действием пружины 14 фиксирует катушку
2 рабочего хода. При установке рабочего инстрзгмента 5 срабатывает датчик 10 положения рабочего инструмента 5, выполненный на базе концевого выключателя, и электромагнит 12 подключается к питающей сети. Под действием электромагнитных сил сердечник 13 втягивается в электромагнит 12 и расфиксирует катушку 2 рабочего
хода. При перемещении в результате уменьшения усилия нажатия или разрушения обрабатываемого материала рабочего инструмента 5 из фиксированного положения датчик 10 положения рабо- чего инструмента 5 срабатывает и обеспечивает электромагнит 12, в результате чего сердечник 13 под действием пружины 14 перемещается и фиксирует катушку 2 рабочего хода.
После установки рабочего инструмента 5 в заданное положение датчик
10положения рабочего инструмента 5 вьщает управляющий сигнал на фиксатор
11и блокировка электромагнитной ма- шины снимается.
Формула изобретения
Электромагнитная машина ударного действия, содержащая катушку рабочего хода с магнитопроводом боек, рабочий инструмент, устройство возврата бойка в исходное положение, корпус, имеющий полость, в которой размещена с возможностью перемещения катушка рабочего хода и устройство управления, о тличающаяся тем, что,с целью noBbmieНИН надежности,она снабжена датчиком положения катушки рабочего хода, связанной с последней через устройство управления, и последовательно соединенными датчиком положения и рабочего инструмента и фиксатором, предназначенным для взаимодействия с катушкой рабочего хода, а вход датчика положения рабочего инструмента соединен с рабочим инструментом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1996 |
|
RU2111847C1 |
| Электромагнитная машина ударного действия | 1985 |
|
SU1404322A1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1998 |
|
RU2135345C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2019 |
|
RU2726336C1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2008194C1 |
| СПОСОБ УПРАВЛЕНИЯ БОЙКОМ ЭЛЕКТРОМАГНИТНОЙ МАШИНЫ УДАРНОГО ДЕЙСТВИЯ | 1999 |
|
RU2221688C2 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1990 |
|
RU2087299C1 |
| Электромагнитный привод ударного действия | 1983 |
|
SU1219219A1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2095233C1 |
| ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ ИНСТРУМЕНТ | 1991 |
|
RU2047477C1 |
Изобретение относится к области машиностроения, а именно к электромагнитным молоткам. Цель изобретения - повьш1ение надежности путем исключения ударов бойка и катушки рабочего хода по корпусу машины. В машине установлены два датчика: датчик 8 положения катушки 2 рабочего хода и датчик 10 положения рабочего инструмента 5,- причем датчик 10 последовательно соединен с фиксатором 11, предназначенным для взаимодействия с катушкой 2 рабочего хода, а вход датчика 10. положения рабочего инструмента 5 соединен с рабочим инструментом 5. Датчик 8 положения катушки рабочего хода 2 связан с этой катушкой рабочего хода 2 через устройство 9 управления. 2 нл. с S (Л s с 00 сл N3 00 
//
Фиг. г
Редактор А.Ворович
Составитель Г.Лукашевич
Техред М.Ходанич Корректор Т. Колб
Заказ 2257/16Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород, ул.Проектная,4
| Авторское свидетельство СССР № 755549, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
