Изобретение относится к электромагнитным машинам ударного действия (ЭММУД) и может быть использовано в электромашиностроении при производстве ударного инструмента и специализированных ударных машин.
В настоящее время в строительстве нашел широкое применение электромеханический ударный инструмент, предназначенный для разрушения и выполнения отверстий в различных строительных материалах, таких как кирпич, бетон, камень. Однако для различных материалов необходимо использовать различные электромеханические машины из имеющегося на рынке ассортимента. Это связано с тем, что разным материалам подходит режим обработки со своим набором таких параметров, как энергия одиночного удара, частота их следования и скорость вращения бурящего инструмента, а существующие машины не позволяют работать с разным сочетанием этих параметров.
Известен способ управления ЭММУД, при котором на боек, взаимодействующий с упругими элементами, подается возмущающее воздействие в виде тяговых импульсов, создаваемых электромагнитной катушкой, включаемой в зависимости от положения бойка (а.с. 2087299, кл. В 25 D 13/00 1990 г.).
Недостатком этого способа является то, что при обработке гетерофазных материалов (каким является бетон) и изменении коэффициента отскока во время бурения участков с разной твердостью уменьшается производительность машины. Связано это с тем, что включение тяговых импульсов осуществляется за счет контактов, срабатываемых во время прохождения рядом с ними бойка, а скорость бойка и, следовательно, время прохождения бойка возле указанных контактов изменятся в соответствии с изменением коэффициента отскока. При бурении твердых материалов важным является соблюдение оптимального соотношения скорости вращения инструмента и частоты ударов. Так известно (см."Ручные электрические машины ударного действия".- М.: "Недра", 1970, с.13), что при бурении твердых пород объемная работа разрушения получается наименьшей при таких углах поворота инструмента, когда за первый оборот инструмент образует впадины, а последующие удары за время второго оборота приходятся по образовавшимся выступам. При бурении гетерофазного материала машиной, управляемой указанным способом, невозможно обеспечить необходимого соотношения скорости вращения инструмента и частоты ударов.
Кроме того, максимальная частота, которую можно обеспечить при работе указанной машины, ограничивается временем, которое необходимо затратить бойку, чтобы пройти расстояние от инструмента после удара по нему до контакта, находящегося по другую сторону катушки.
Известен способ управления ЭММУД, при котором на боек, взаимодействующий с упругим буферным элементом, подается возмущающее воздействие в виде прямого и обратного тяговых импульсов, создаваемых электромагнитной катушкой (а. с. 959250, кл. Н 02 Р 7/62, 1972 г.).
Недостатком указанного способа является низкая производительность машины при обработке гетерофазных материалов с переменной твердостью.
Это связано с тем, что боек контактирует с упругим элементом (буфером на пружине) в конце обратного хода, положение бойка при обратном ходе определяется только обратным электромагнитным тяговым импульсом и энергией, полученной бойком при отскоке. При изменении коэффициента отскока в диапазоне 0-0.5, время обратного хода бойка до контакта с буфером на пружине может иметь разброс значений до 50-70%. После контакта с буфером, превышающим массу бойка, боек отскакивает от буфера, таким образом завершая обратный ход. Исходя из сказанного в рассматриваемой машине общее время обратного хода бойка до момента подачи нового тягового импульса на инструмент сильно зависит от коэффициента отскока и при обработке гетерофазных материалов с переменой твердостью отсутствуют условия синхронизации подачи тяговых импульсов с ходом бойка на инструмент. Таким образом эффективность управления известным способом при обработке переменных по твердости материалов ухудшается.
Кроме того, известный способ сужает область технических параметров ЭММУД в части максимальной частоты, с которой можно обеспечить эффективную работу машины, за счет увеличения времени, затрачиваемом бойком на возвращение от инструмента до буфера, что необходимо для завершения рабочего цикла.
Задача, решаемая в предлагаемом изобретении, заключается в исключении указанных недостатков, а именно в повышении производительности машины при обработке гетерофазных материалов с переменной твердостью и увеличение максимальной частоты ударов ЭММУД.
Поставленная задача в способе управления бойком электромагнитной машины ударного действия, включающем взаимодействие бойка с инструментом, наложение на собственные колебания системы бойка с воздействующими на него упругими элементами, внешних тяговых периодических импульсов, создаваемых электромагнитной катушкой, достигается тем, что соотношение между параметрами собственных колебаний и внешних тяговых импульсов выбирают таким образом, чтобы всю энергию отскока бойка от инструмента аккумулировать в упругих элементах колебательной системы, суммировать с энергией тяговых периодических импульсов и перевести в кинетическую энергию поступательного движения бойка на инструмент, при этом частоту подачи тяговых импульсов устанавливают выше частоты собственных колебаний системы бойка.
Заявляемый способ позволяет максимально использовать потребляемую энергию ЭММУД на преобразование в кинетическую энергию удара, что обеспечивает максимальную производительность ее работы. Указанный выбор отношений частот тяговых импульсов и собственных колебаний системы, обеспечивает сохранение запасенной в упругих элементах энергии отскока до момента подачи нового тягового импульса.
Целесообразно для обеспечения условий синхронизации колебаний системы и вынуждающих воздействий тяговых импульсов параметры колебательной системы бойка выбрать асимметричными относительно положения равновесия бойка путем изменения характеристик упругих элементов таким образом, чтобы длительность хода бойка в пространстве со стороны инструмента относительно положения равновесия бойка была меньше длительности хода бойка в пространстве с противоположной стороны. При этом часть цикла колебания системы бойка, зависимая от условий отскока, уменьшается, а часть цикла колебания системы бойка, зависимая от тяговых импульсов и параметров собственных колебаний, увеличивается, что обеспечивает управляемость процесса колебаний с меньшим влиянием на них возмущающего действия отскока.
Выгодно для повышения синхронизации собственных колебаний системы и тяговых импульсов выбрать отношение длительности хода бойка в пространстве со стороны инструмента относительно положения равновесия бойка к длительности хода бойка с противоположной стороны менее 1/3. При этом величина изменения длительности обратного хода бойка за счет возмущающих воздействий отскока будет на порядок меньше величины собственно длительности обратного хода. Это связано с тем, что такая система имеет собственные колебания бойка с коротким по длительности ходом после отскока от инструмента до точки соответствующей равновесию системы. Именно эта часть хода бойка обеспечивает изменение времени общего хода бойка от инструмента, т.к. ход бойка от положения равновесия до точки максимального отклонения соответствует частоте собственных колебаний системы. Исходя из выбранных условий асимметрии длительностей собственных колебаний системы общее время обратного хода за счет отскока может изменяться за счет отскока не более чем на 10%, а при дальнейшем увеличении асимметрии общее время обратного хода может изменяться совсем незначительно.
Перспективно для обеспечения условий совершения максимальной механической работы выбрать параметры тягового импульса таким образом, чтобы отношение длительности тягового импульса к времени хода бойка на инструмент во время удара лежало в пределах 0.8-1.2.
Это позволяет синхронизировать время подачи тягового импульса с временем движения бойка на инструмент.
Целесообразно для обеспечения условий стабильности совершения максимальной механической работы электромагнитными силами катушки в каждом цикле работы ЭММУД выбрать отношение периода подачи тяговых импульсов к сумме длительности тягового импульса и полупериода собственных колебаний системы бойка в диапазоне 0.8-1.2. Это позволяет синхронизировать время подачи тягового импульса с временем движения бойка на инструмент в каждом цикле работы ЭММУД.
При выполнении указанных условий заявляемый способ обеспечивает автоматическое синхронизирование по времени всех стадий колебаний бойка независимо от коэффициента отскока при совершении максимальной механической работы в каждом цикле ЭММУД, что не имеет аналогов в технике создания ЭММУД, а значит соответствует критерию "изобретательский уровень".
На фиг.1 представлен вариант ЭММУД, реализующей заявляемый способ.
На фиг.2-5 представлены диаграммы работы указанной ЭММУД, представленной на фиг.1.
ЭММУД (см. фиг.1) включает ударный инструмент 1, статор в виде катушки 2 с магнитопроводом 3, боек 4, расположенный внутри ствола 5, связанный с возвратной пружиной 6 и тормозящей пружиной 7.
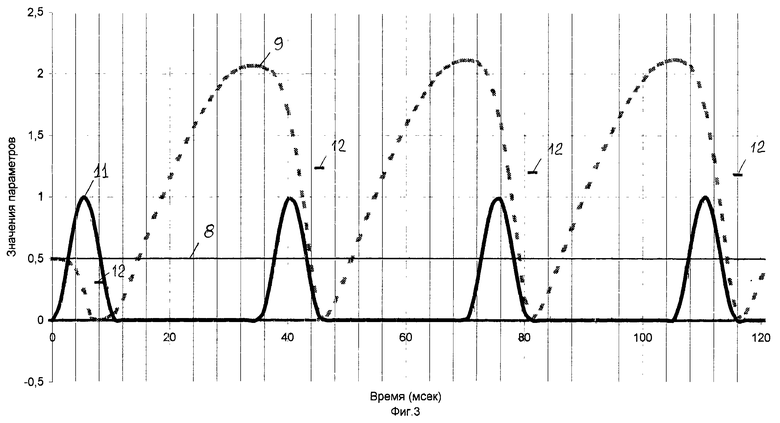
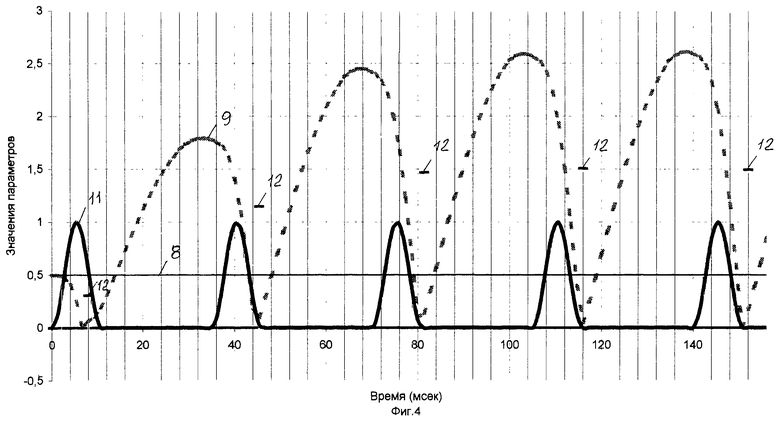
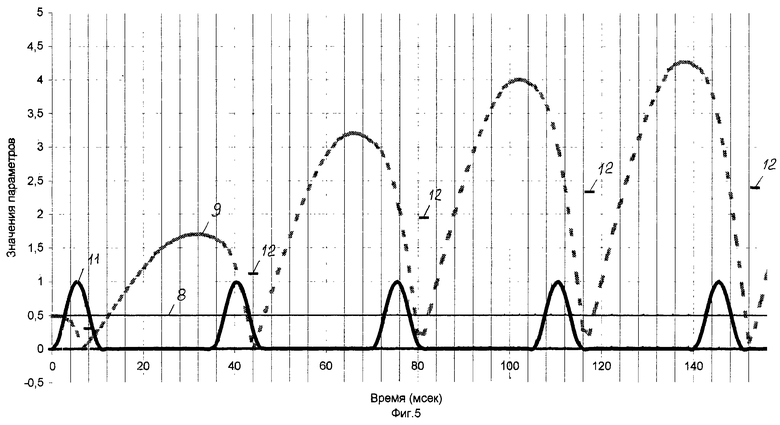
На фиг. 2 приведена диаграмма собственных колебаний системы, где диаграмма колебаний бойка вокруг линии равновесия 8 показана графиком 9, а соответствующая этим колебаниям диаграмма сил упругой системы показана графиком 10. Длительность нахождения бойка в пространстве со стороны инструмента относительно положения равновесия составляет 11 мс. Длительность нахождения бойка в пространстве, противоположном от инструмента относительно положения равновесия, составляет 39 мс (положение кривой 9 выше линии 8). Таким образом, выдерживается условие по отношению этих длительностей большего трех. На фиг. 3 показана диаграмма колебаний бойка при вынуждающем электромагнитном импульсе 11 и с энергией единичного удара 12. Коэффициент отскока при этом равен нулю. На фиг.4, 5 приведены такие же диаграммы при коэффициентах отскока соответственно равных 0,25 и 0,5.
Устройство работает следующим образом. При подаче импульса тока на катушку 2 возникает тяговое усилие электромагнитного поля и боек 4 движется в направлении инструмента 1, преодолевая действие пружины 6. После удара и отскока от инструмента 1 боек 4 движется в направлении от инструмента, ускоряемый действием пружины возврата 6 до точки равновесия бойка в колебательной системе. После прохода точки равновесия боек 4 начинает сжимать пружину торможения 7. Сжатие пружины 7 будет обеспечиваться за счет возврата накопленной механической энергии в пружине 6 до положения бойка при котором запас этой механической энергии будет равен механической энергии накапливаемой пружиной 7. Дальнейшее сжатие пружины 7 возможно только за счет доли энергии, переданной бойку 4 при отскоке от инструмента 1.
В момент остановки бойка накопленная механическая энергия в пружине 7 определяется механической энергией пружины 6 и энергией отскока. После остановки боек начинает движение на инструмент, и происходит суммирование механической энергии, запасенной в пружине 7, с электромагнитной энергией, запасаемой катушкой 2. Оба вида энергии преобразуются в кинетическую энергию поступательного движения бойка 4 в сторону инструмента 1. Параметры тягового электромагнитного импульса выбираются таким образом, чтобы его длительность соответствовала времени движения бойка 4 на инструмент 1. По ходу движения бойка на инструмент часть энергии тратится на преодолении упругих сил пружины 6. Таким образом, в момент удара кинетическая энергия бойка 12 будет определяться энергией, полученной в результате отскока в предыдущий удар, и электромагнитной энергией, запасенной в катушке. После отскока бойка 4 от инструмента 1 цикл повторяется.
Управление бойком осуществляется следующим образом. Собственные колебания бойка на упругих элементах, удовлетворяющие отношению длительностей, обеспечиваются выбором жесткости пружин 6 и 7 и смещением положения равновесия к инструменту. В установившемся режиме вынужденных колебаний удар по инструменту производится с окончанием действия импульса тяговой силы 12. В зависимости от коэффициента отскока боек движется а обратном направлении с разной начальной скоростью и дополнительным ускорением, обеспечиваемым возвратной пружиной 6. Разная скорость бойка сказывается на времени, в которое кривая 9 пересекает линию 8 (см. фиг.3, 4, 5). Диапазон возможного изменения этого времени не может превышать половины длительности, в течение которой график 9, соответствующий собственным колебаниям системы, ниже линии 8 (см. фиг. 2). Для данного случая это время приблизительно равно 5 мс и оно соответствует коэффициенту отскока равному 1. Для реальных коэффициентов отскока не более 0,5 диапазон разброса этого времени не превысит 2,5 мс. Длительность хода бойка от точки, где график кривой 9 пересекает линию равновесия 8, до точки его останова в крайнем положении, равна для всех вариантов отскока (см. фиг.3,4,5) и определяется только собственной частотой колебаний и равна 19,5 мс. Повышенная энергия отскока используется на большие перемещения бойка 4 в сторону от инструмента 1, аккумулируя энергию отскока в тормозящем упругом элементе 7. К моменту останова бойка в этом крайнем положении производится подача следующего тягового импульса на катушку 2. При этом величина тока в катушке определяется ее индуктивным сопротивлением, зависящим от положения бойка. При большем отклонении бойка индуктивное сопротивление катушки меньше, а следовательно, величина тока больше. При большем токе обеспечивается больший запас электромагнитной энергии в катушке.
Параметры тягового импульса 11 (длительность и амплитуда) и период его подачи выбраны таким образом, чтобы обеспечить следующие условия: - равенство длительности импульса 11 и времени хода бойка на инструмент; - равенства периода подачи импульса и длительности тягового импульса 11 и времени обратного хода бойка (равному полупериоду собственных колебаний системы). Для нашего случая амплитуда импульса равна 100 ньютон, ширина импульса равна 8 мс, период подачи импульса равен 32 мс. Таким образом время окончания тягового импульса и удара совпадают, и после отскока цикл повторяется.
При использовании заявляемого способа управления при обработке гетерофазного материала энергия удара автоматически будет повышаться при внедрении инструмента в более твердый материал и понижаться при внедрении в более мягкий материал (см. фиг.3, 4, 5).
При внедрении инструмента 1 в более твердый материал происходит больший отскок бойка 4 от инструмента 1, при этом энергия отскока используется на больший вывод бойка 4 за пределы катушки 2 и повышение таким образом запаса электромагнитной энергии. Далее энергия отскока возвращается упругим элементом 7 в систему и суммируется с электромагнитной энергией катушки, чем обеспечивается большая энергия удара 12. После разрушения твердой фазы гетерофазного материала энергия удара автоматически уменьшается (см. фиг.3, 4, 5).
При работе на повышенных частотах удара боек 4, отскочивший от инструмента 1, ускоренный пружиной 6 в направлении от инструмента, тормозится как за счет действия пружины 7, так и за счет действия тягового импульса катушки 2. После остановки боек 4 движется в направлении инструмента 1 за счет энергии, накопленной в пружине 7, и продолжающим действовать тяговым усилием катушки 2. После удара тяговое усилие катушки 2 прекращает свое действие и цикл повторяется. За счет расположения бойка 4 в равновесии, смещенном в сторону инструмента 1, обеспечивается повышение КПД удара, т.к. смещение бойка 4 при обратном ходе за точку равновесия обеспечивает частичную компенсацию потерь энергии возвратной пружины 6, энергией запасаемой в пружине 7. При этом, чем меньше длительность хода бойка в пространстве со стороны инструмента относительно положения равновесия, тем выше частота ударов, которая может быть реализована в данном устройстве.
Таким образом, заявляемый способ позволяет повысить производительность машины при обработке гетерофазных материалов с переменной твердостью и увеличить максимальную частоту ударов ЭММУД.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1999 |
|
RU2192346C2 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1998 |
|
RU2135345C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496215C1 |
| СИНХРОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496214C2 |
| Электромагнитная машина ударного действия | 1985 |
|
SU1404322A1 |
| Способ управления двухкатушечным электромагнитным двигателем | 1986 |
|
SU1525856A1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2008194C1 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1972 |
|
SU959250A1 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1987 |
|
SU1577064A1 |
| Электромагнитный молоток | 1983 |
|
SU1127762A1 |

Изобретение относится к электромагнитным машинам ударного действия и может быть использовано в электромашиностроении при производстве ударного инструмента и специализированных ударных машин. Заявляется способ управления бойком электромагнитной машины ударного действия, включающий взаимодействие бойка с инструментом, наложение на собственные колебания системы бойка с воздействующими на него упругими элементами внешних тяговых периодических импульсов, создаваемых электромагнитной катушкой. Новым является то, что соотношение между параметрами собственных колебаний и внешних тяговых импульсов выбирают таким образом, чтобы всю энергию отскока бойка от инструмента аккумулировать в упругих элементах колебательной системы, суммировать с энергией тяговых периодических импульсов и перевести в кинетическую энергию поступательного движения бойка на инструмент, при этом частоту подачи тяговых импульсов устанавливают выше частоты собственных колебаний системы бойка. Техническим результатом является повышение производительности машины при обработке гетерофазных материалов с переменной твердостью и увеличение максимальной частоты ударов. 4 з.п.ф-лы, 5 ил.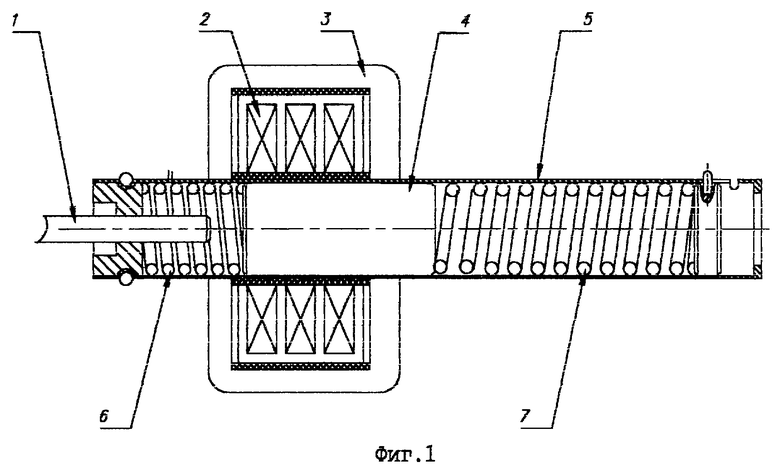
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1972 |
|
SU959250A1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1990 |
|
RU2087299C1 |

