1, 13
Изобретение относится к информационно-измерительной технике и может найти широкое применение для точного И31 еренйя веса различных грузов.
Целью изобретения является расширение динамического диапазона измерения в область измерения малых масс.
На фиг. 1 представлена конструкци весов; на фиг. 2 - структурная схема весов.
Весы содержат дополнительную чашку 1 и крьшку 2, Чашка 1 установлена в проточку основной грузоприемной чашки 3 и через упоры 4 в подпятники 5, запрессованные на конце податливой консоли 6. Грузоприемная чашка 3 4ерез упоры 7 установлена в подпятниках 8 на жесткой консоли 9. С податливой консолью жестко соединена катушка 10 силовой компенсации, с жесткой - консольно-магнитная система 11 компенсатора, которая фиксируется с помош;ью упора 12 и винта 13 емкостного датчика 14 взаимного пере меш,ения консолей, а на конце податливой консоли установлен фотодиод.15 датчика абсолютного перемещения податливой консоли Консоли 6 и 9 жестко соединены между собой и скреплены с помощью опорной втулки 16 с неподвижным основанием 17.
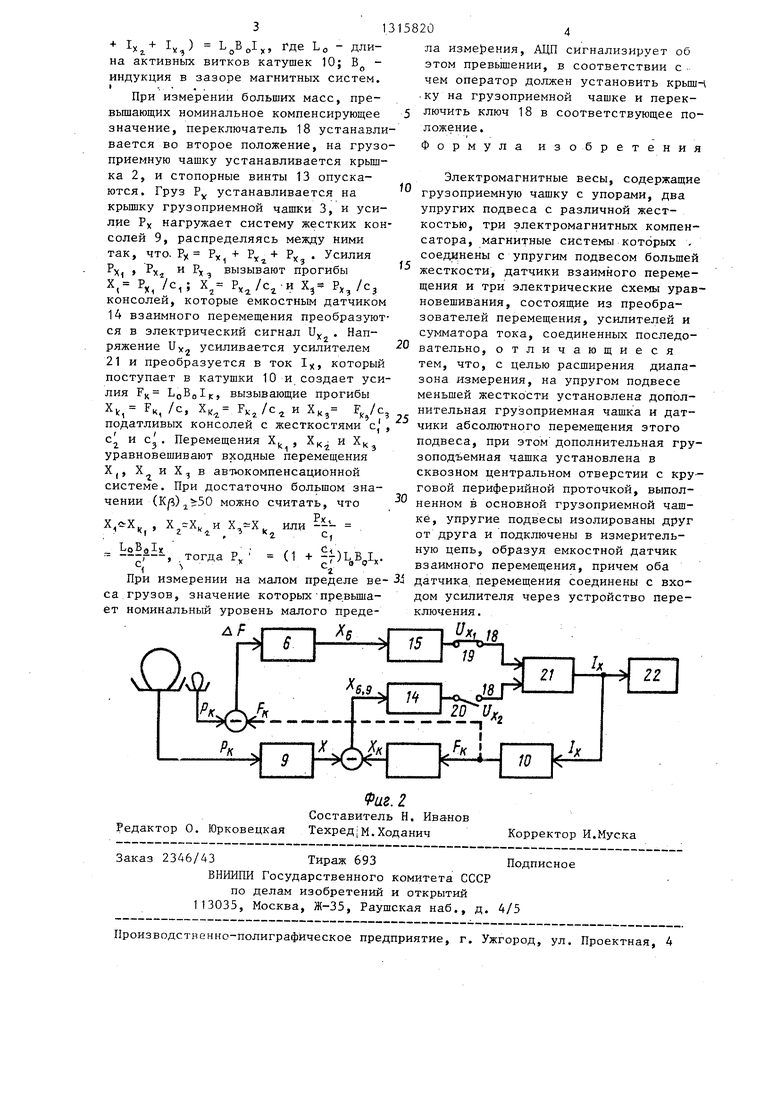
Груз Р, устанавливается на чашку 1 (при малой массе) или на крышку 2 с грузоприемной чашкой 3 (при бо.льшой массе). В первом случае консоли 9 и магнитные системы 11 зафиксированы, и сила тяжести Р груза воздействует только на податливые консоли 6 и уравновешивается компенсирующим усилием F. Некомпенсация uF вызывает прогиб консоли Xg (фиг. 2), который преобразуется фотодиодом 15 датчика абсолютного перемещения консоли в электрический сигнал U , ,
Синхронно переключаемый ключ 18 .находится в положении, при котором контакты 19 замкнуты, контакты 20 разомкнуты, и сигнал U,, поступает на один из входов усилителя 21 с ко- зффициентом усиления К . Выходной ток усилителя 1, поступает в катушки 10 силовой компенсации и создает компенсирующие усилия F , уравновешивающие вес Р груза (связь показана пунктиром).
При больших значениях измеряемого веса Ру груза он воздействует на расфиксированные жесткие консоли 9, которые прогибаются на величину X.
0. 2
Емкостный датчик 14 взаимного перемещения Xgg консолей преобразует последнее в электрический сигнал U (фиг, 2). При измерении больших масс
ключ 18 находится -в положении, при котором контакты 20 замкнуты, а контакты 19 разомкнуты, и сигнал U поступает на второй вход усилителя 21 с коэффициентом усиления Ку . Выходной ток I jf усилителя поступает в катушки 10 силовой компенсации, которые создают усилия . Последние воздействуют на податливую консоль и вызывают ее перемещение Х, компенсирующее входные перемещения X.
Выходной: ток 1 преобразуется с помощью аналого-цифрового преобразователя (ЛЦП) 22 в цифровой отсчет. Весы работают следующим образом.
В зависимости от значения массы измеряемых грузов весы работают в одном из двух режимов: в компенсационном при измерении малых масс или в режиме упругого масштабирования (с
входным делителем силы) при измерении больших масс. Когда заблаговременно известно, что измеряемая масса не превышает номинального значения компенсирующего усилия, оператор устанавливает переключатель 18 в положение, при котором контакты 19 замкнуты, крьппка 2 снята, стопорные винты 13 фиксации магнитных систем ввинчены до упоров 12, и на чашку 1
устанавливается измеряемый груз РХ . Усилие РХ нагружает только систему трех податливых консолей бив зависимости от месторасположения груза на чашке распределяется соответствующим образом на гконсоли так, что
ГУ 11
+ р.- + р
J
Усилия Р
X,
и Ру уравновешиваются соответствующими усилиями катушек 10 магнитоэлектрических компенсаторов 7, F
5 и F . Некомпенсация AF (uF , uF) воздействует на податливую консоль, вызывая ее прогиб Xg, преобразующийся фотодиодом 15 датчика абсолютного перемещения консоли в электричес0 кий сигнал }y , который усиливается , усилителем 21 и преобразуется в ток 1x9 создающий Компенсирующие усилия FX, , F Ь„В„1, и F - LgBgly , где Lg - длина витков;
5 BO - индукция.
При коэффициенте преобразования разомкнутой системы 100 с достаточной точностью Р.. F.,
PV F
и Рхз k, или Р F Св1(1,%
+ ly,) , Где LO - длина активных витков катушек 10; В индукция в зазоре магнитных систем, I -. . .
При измерении больших масс, превышающих номинальное компенсирующее значение, переключатель 18 устанавливается во второе положение, на грузо- приемную чашку устанавливается крышка 2, и стопорные винты 13 опускаются. Груз Ру устанавливается на крьш1ку грузоприемной чашки 3, и усилие РХ нагружает систему жестких консолей 9, распределяясь между ними так, что. РХ РХ + Р . Усилия РХ и РХЗ вызывают прогибы
Х, РХ, Х. Х, Р,,/Сз консолей, которые емкостным датчиком 14 взаимного перемещения преобразуются в электрический сигнал U . Напряжение Uy усиливается усилителем 21 и преобразуется в ток ly, который поступает в катушки 10 и создает усилия F LoBoI, вызывающие прогибы
Xfc, FK, /с, Х, F, /с и Х F,/c,
-1
Ч, Тз податливых консолей с жесткостями с.
с и с . Перемещения Х
X
ки Xw
уравновешивают входные перемещения Х|, X и Х в автюкомпенсационной системе. При достаточно большом значении (К), О можно считать, что
PV,
Х,еХ
ч,
X сгХ, и Х,-Х,
LoBfllK
или --- с,
Ci
, .тогда Р, (1 + ;т-)ЬЛ1. N
При измерении на малом пределе веса грузов, значение которых-npe.Bbmia- ет номинальный уровень малого предеРедактор 0. Юрковецкая
Фаг. 2
Составитель Н. Иванов Техред Iм.Ходанич
Заказ 2346/43Тираж 693Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
158204
ла изме)ения, АЦП сигнализирует об этом превьш ении, в соответствии с чем оператор должен установить крьш-i ку на грузоприемной чашке и перек- 5 лючить ключ 18 в соответствующее положение. Формула изобретения
Электромагнитные весы, содержащие грузоприемную чашку с упорами, два упругих подвеса с различной жесткостью, три электромагнитных компенсатора, магнитные системы которых . соединены с упругим подвесом большей жесткости, датчики взаимного перемещения и три электрические схемы уравновешивания, состоящие из преобразователей перемещения, усилителей и сумматора тока, соединенных последовательно, отличающиеся тем, что, с целью расширения диапазона измерения, на упругом подвесе меньшей жесткости установлена дополнительная грузоприемная чашка и датчики абсолютного перемещения этого подвеса, при этом дополнительная грузоподъемная чашка установлена в сквозном центральном отверстии с круговой периферийной проточкой, выполенном в основной грузоприемной чаше, упругие подвесы изолированы друг
от друга и подключены в измерительную цепь, образуя емкостной датчик взаимного перемещения, причем оба датчика, перемещения соединены с вхо дом усилителя через устройство переключения .
Корректор И.Муска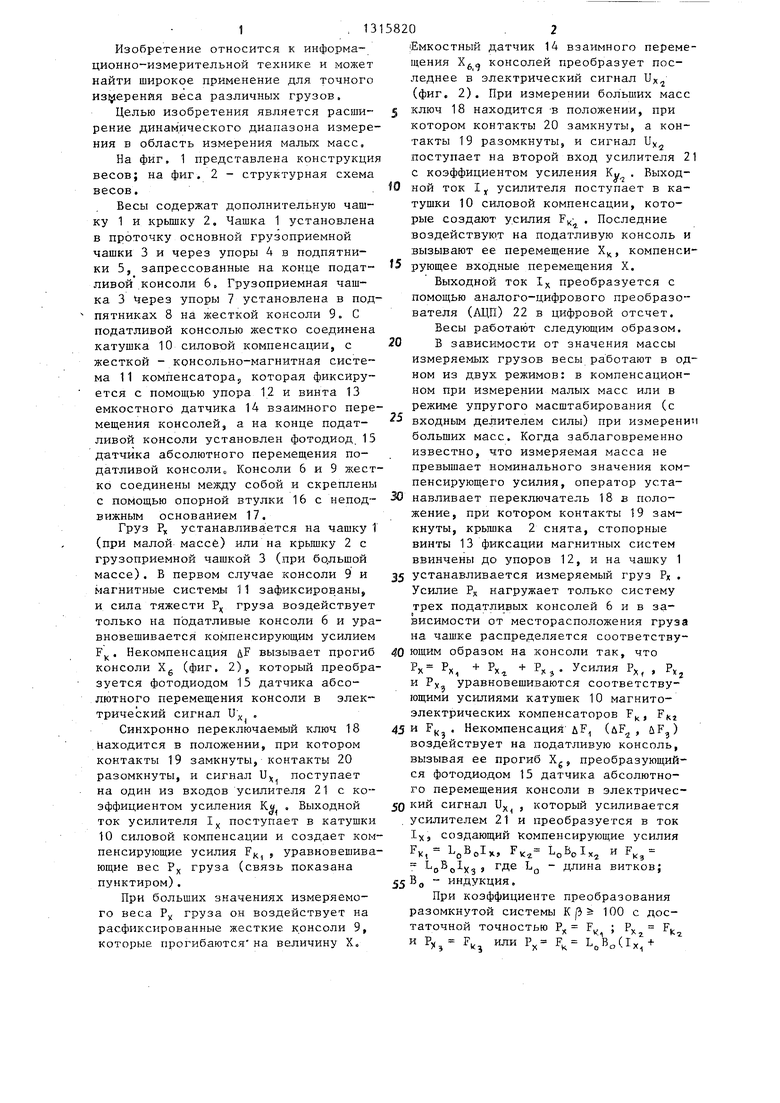
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехопорные электромагнитные весы | 1983 |
|
SU1107000A1 |
| Трехопорные электромагнитные весы | 1985 |
|
SU1290082A1 |
| Электромагнитные весы | 1979 |
|
SU851106A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1068723A1 |
| Электромагнитные весы | 1987 |
|
SU1597586A1 |
| Трехопорные электромагнитные весы | 1984 |
|
SU1203374A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1394055A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1979 |
|
SU785652A1 |
| Трехопорные электромагнитные весы | 1987 |
|
SU1571409A1 |
| Разбраковочные весы | 1979 |
|
SU783593A2 |
Изобретение относится к информационно-измерительной технике и позволяет расширить динамический диапазон измерений в область малых масс. В сквозном центральном отверстии основной чашки 3 через упоры 4 установлена в подпятниках 5 дополнительная грузоприемная чашка 1. Размещенный -на воздействует на податливые консоли 6, прогиб которых преобразуется фотодиодом 15 датчика абсо-. лютного перемеш;ения консоли в электрический сигнал. Создаваемое с помощью катушки силовой компенсации усилие уравновешивает массу груза. Устройство переключения обеспечивает требуемый режим работы весов. 2 ил. 9 8 7 6 5 2 ; 4s /y//Z////////////7/y Y/////// 7/A /y7y. XXN N N ч /5 // /J (Л 2 ; ////////////7/y У/,У/////////7///А Y/////// 7/A /y7y./J -f /7////Y////y//y//y / со ел 00 ГС IS. N fpuz.1 17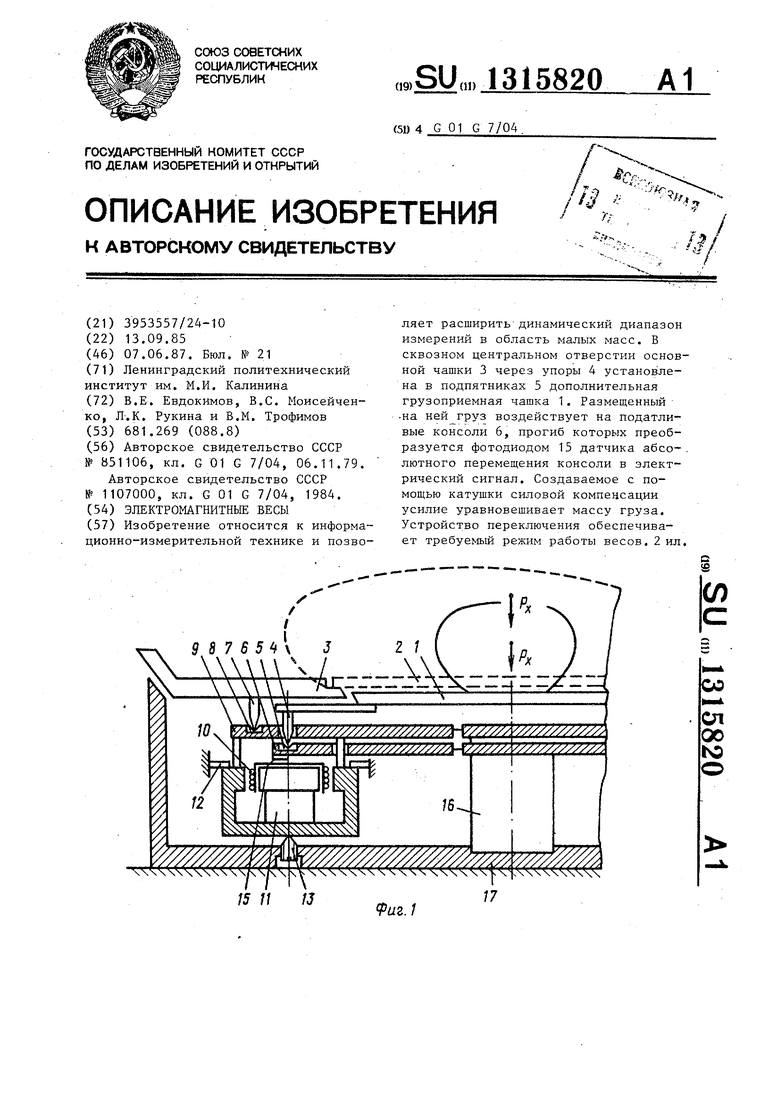
| Электромагнитные весы | 1979 |
|
SU851106A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Трехопорные электромагнитные весы | 1983 |
|
SU1107000A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
