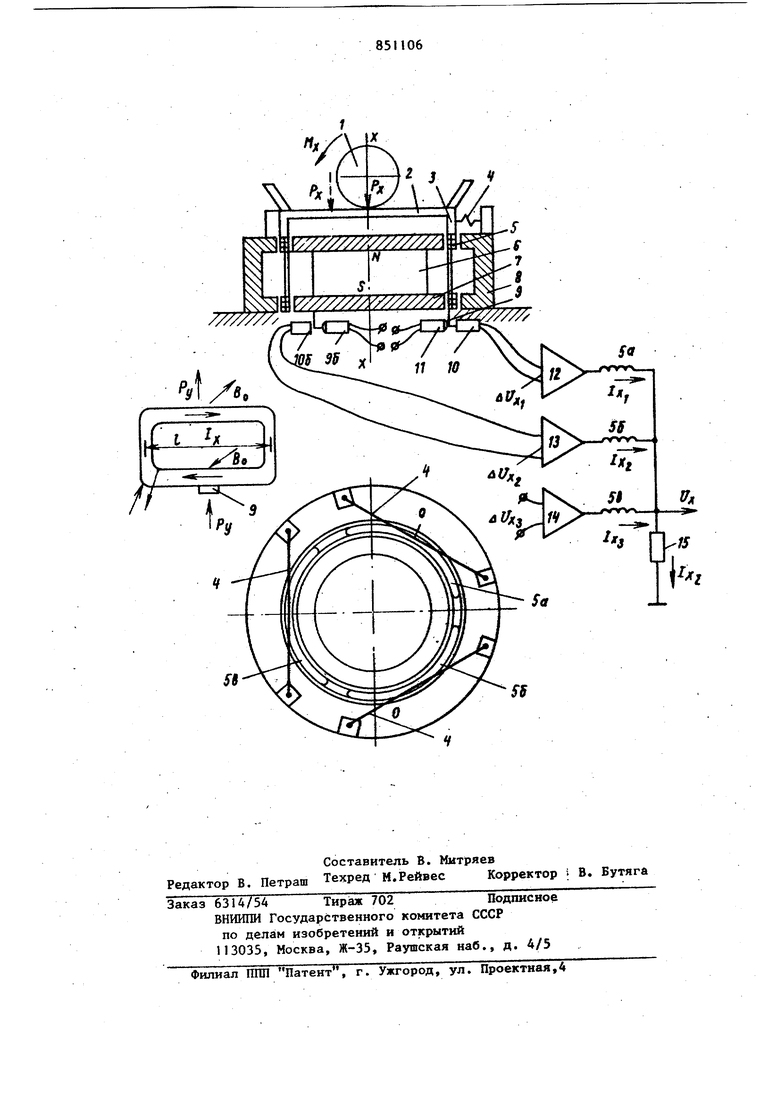
(54) ЭЛЕКТРОМАГНИТНЫЕ ВЕСЫ Изобретение относится к технике измерения массы, а более конкретно к точным весам с электромагнитным уравновешиванием. Известны электронные весы, содержащие чувствительный элемент,например, в виде коромысла с чашкой, и электрическую систему уравновешивания, выходной сигнал которых .представлен аналоговой величиной(на пряжение, ток)с цифровым отсчетным ус ройством на выходе l 3. Такие весы при достаточной точно ти имеют большое время измерения и достаточно сложны из-за наличия KOp мысла. Наиболее близким по технической сущности к предлагаемому являются электромагнитные весы, содержащие чувствительный элемент с грузоприем ной чашкой и системой подвески, электрическую систему уравновешиваиия с датчиками перемещения и усили телями и магнитную систему с цилиндрической силовой катушкой р}, Недостатком устройства такого типа является сравиительно низкая точность Измерения связанная с положением груза на платформе весов. Цель изобретения - упрощение системы подвески и исключение влияния эксцентричного положения груза. Для достижения поставленной цели в силовую катушку введены це менее трех рамочных обмоток, уложенных на цилиндрической поверхности катушки, активные сторошл рамочных обмоток расположены в двух рабочих зазорах магнитной системы, причем электрическая система уравновешивания выполнена с датчиками перемещения и усилителями по числу рамочных обмоток, одни концы которых включены на выход усилителей, а другие объединены на суммируиицем сопротивлении. На чертеже не показаны электромагнитные весы и схема включения рамочных обмоток.Р Измеряемый груз 1 мае сой W х or устанавливается на грузоприемную чашку 2, которая соединена жестко с каркасом 3 катушки силовой компенсации. Каркас 3 соединен с корпусом при помощи упругого подвеса, например треугольной системы растяжек 4, На каркасе 3 уложены три рамочных обмотки 5 (5а, 5 б к 5 в) Магнитная система содержит постоянный магнит 6 с дв-умя ПОЛЮСН1Л4И наконечниками 7 и магнитопровод 8. Посередине обмоток установлены флажки 9, с двух сторон которых установлена фотопара из фотодиода 10 и светодиода 11. Фотодиоды 1, (а,б,й)включе1Ш на вход усилителей 1 2 ( 3 и 14). К выходам усилителей подключены обмотки 5. Вторые концы обмоток подключены вместе к суммирующему резистору 15. С выхода р зистора 15 снимается выходное напряжениеНа цилиндрической катушке размещены, например, три(по числу опор рамочньо: обмотки, противоположные стороны которых размещены в двух кольцевых зазорах с противоположи радиаль ным направлением магнитиого поля в за зорах. При прохождении по обмотке тока 1 обеими сторонами обмотки создаются уравновешивакщие усилия Р Устанавливаются датчики перемещения каждой из обмоток, например фотодатчики, содержащие фотопару, закрепленную на корпусе, и флажок (диафрагму) на обмотке. При эксцентричном положении груза РХ на чашке различные усили в точках О вызывают соответствующие им пропорциональные перемещения, кото рые преобразуются датчиками перемещен в электринеские сигналы &Ux(AUj( Последние .усиливаются усилителями тока(12-14). Выосодные токи усилителей 1« , 1 и1 поступают в соответствую J создают ycилияFy i ZCWБoI где I - длина активной, стороны обмотки; W число обмоток; В -индукция в зазоре. Усилия Ру,РуаИ Fy уравновешивают составляющие Pj Ру и P;i в опорах 0. Таким образом, с достаточной точностью .-,a.. 2tWBoax r4 -1,i3 2EwBoI. Выходное напряжение иj( РО Ij и не зависит от места установки его на грузоприемной чашке. По сравнению с круглой катушкой суммарнаяактивная длина рамочных обмоток практически равна длине круглой катушки, а длина пассивньпс витков (.боковые, не создающие уравновешивающего усилия) может быть сделана небольшой(О,2 - 0,3)t особенно, в наиболее перспективных магнитных системах с большой коэрцитивной силой постоянных магнитов. Таким образом, основиые характеристики магнитоэлектрического уравновешивающего преобразователя практически не изменяются, в то время как важнейший конструктивный узел электро-, магнитных весов - упругий параллелограмм сил существенно упрощается, поскольку исключается основное требование - независимость показаний от точки приложения силы. Таким об)азом, независимость от условий нагружения позволяет параллелограмм сил с успехом заменить обычной простейшей. подвеской в виде, например тре:угольной системы растяжек. Формула изобретения . Электромагнитные весы, содержащие чувствительный элемент с грузоприемной чашкой и системой подвески,элЪктрическую систему уравновешивания с датчиками перемещения и усилителями и магнитную систему с цилиндрической силовой катушкой, о т л ич ающи еся тем, что, с целью упрощения системы подвески и исключения влияния эксцентричного положения груза, в силовую катушку введены не менее трех рамочных обмоток, уложенных на цилиндрической поверхности катушки, активные стороны рамочных обмоток расположёны в двух рабочих зазорах магнитной системы, причем электрическая система уравновешивания выполнена с датчиками перемещения и усилителями по числу рамочных обмоток, одни концы которых включены на выход усилителей, а другие объединены на суммируняцем сопротивлении. Источиики информации, принятые во внимание при экспертизе 1.Патент США № 3786883, кл. 177-164, 1976. 2.Патент ФРГ N1809108, кл. в 01 G 7/02, 1968 (прототип
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1394055A1 |
| Электромагнитные весы | 1986 |
|
SU1337671A1 |
| Трехопорные электромагнитные весы | 1985 |
|
SU1290082A1 |
| Электромагнитные весы | 1987 |
|
SU1597586A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Электромагнитные весы | 1983 |
|
SU1150492A1 |
| Весы с электромагнитным уравновешиванием | 1981 |
|
SU993036A1 |
| Весоизмерительное устройство | 1988 |
|
SU1719915A1 |
| Электромагнитные весы | 1979 |
|
SU838388A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1987 |
|
SU1446483A1 |