:о X)
4: О СП СЛ
Изобретение относится к весоизме- р|ительной технике.
j Цель изобретения - повышение точности.
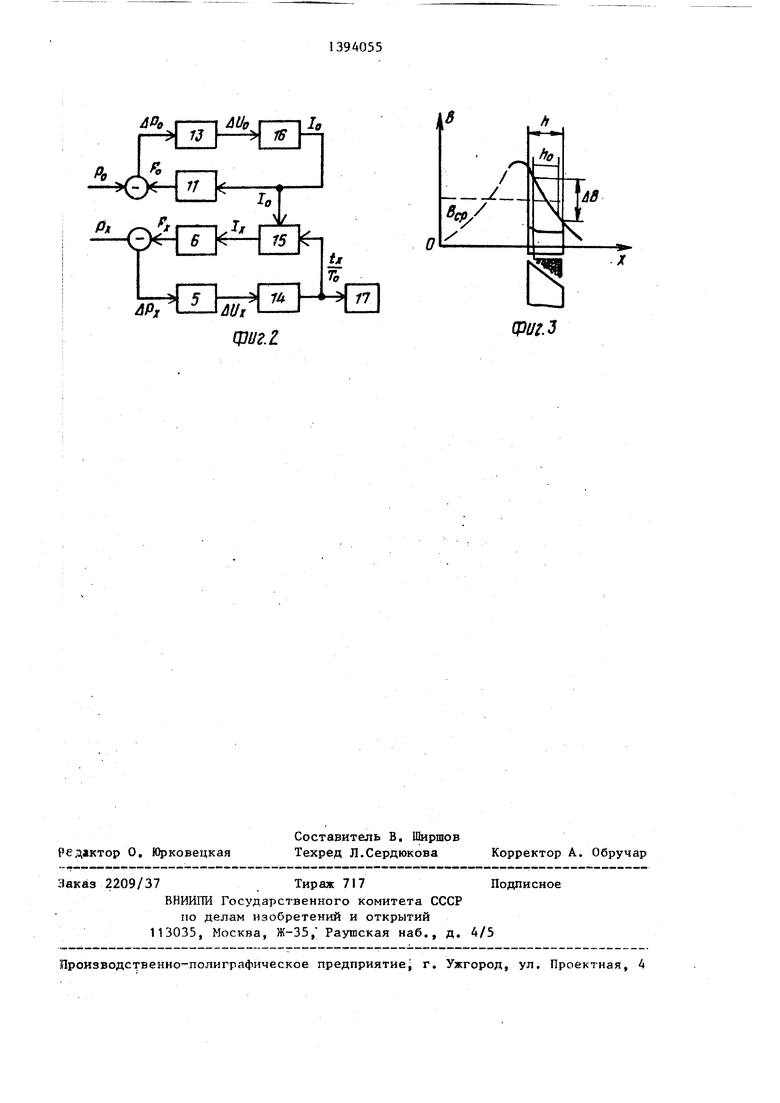
I На фиг. 1 показаны весы с злектро- г|1агнитным уравновешиванием, общий .вид $а фиг. 2 - структурная схема весов; йа фиг, 3 - кривая магнитной индукции в наружной краевой области зазора
Бесы с электромагнитным уравнове- 1 1иванием содержат чувствительный элемент 1 с грузоприемной чашкой.2 для измеряемого груза 3 массой т , систе- .у упругой подвески чувствительного элемента 4, датчик перемещения чувст- зительного.элемента, например емкостг1Ый датчикр образованный пластинами 5 1змерительную катушку 6 силовой компенсации, расположенную в рабочем зазоре магнитной системы. Магнитная система содержит постоянный магнит 7 |с верхним полюсш 1м наконечником 8 и магнитопроводом 9. В нижнем зазоре, образованном магнитопроводом 9 и нижним полюсным наконечником.10, располо |жена эталонная катушка 11, несущая подвижный электрод 13 емкостного дат- |чика перемещения эталонной катушки И jПоследняя закреплена, например с поI мощью трех радиально натянутых растя- :жек 12. Измерительная катушка 6 скреп i лена с пластиной 5 и с амой системы ; упругой Подвески, Пластина 5 емкост- I ного датчика электрически соединена
(фиг. 2) с преобразователем 14 напряжения &Ux во временной интервал, соединенным с модулятором 15. Электрод 13 емкостного датчика перемещения подключен к усилителю 16, токовый выход усилителя 16 ,- к входу модулятора 15, вь1ход которого подключен к измерительной катушке 6. К усилителю 16 тока подключена эталонная катушка 11, к выходу преобразователя 14 - отсчетный прибор 17.
Весы работают следующим образом.
Эталонная катушка заданной массы Ид, т.е. весом Р moq, расположена (фиг, 1) в нижнем зазоре магнитной системы со скошенным магнитопроводом что обеспечивает постоянный градиент
dB
магнитной индукции
QX
const в за
ется усилителем 16 в постоянный ток 1, который проходит по катущке 11 с длиной витков 1, создавая электромагнитное усилие
FO- fx
lolo
(В +.Ьх),
о
где В.
- среднее значение ин- дукции на экране зазора;
ho - высота катушки; / U.X - смещение катушки. Таким образом, электромагнитное усилие F характеризуется постоянной составляющей F,, 1„К.,В„1-. и переменной составлягацей f.
w.ux, за50 5 g
5
5
0
висящей от перемещения лх эталонной катушки, где w.. AB/h - отрицательная жесткость.
Вес эталонной катушки Р , длина витков 1с, и ток IP рассчитываются таким образом, чтобы постоянная составляющая FJ, уравновешивала вес Pj,, т,е, FO Р., l IpKoBo, а переменная f компенсировала усилие от жесткости w упругого подвеса (растяжки) при перемещении на лх, т.е. f . Усилие f является усилием отрицательной жесткости, которое создается соответствующим направлением тока 1, обеспечивающим в то же время уравновешивание PQ .
При отсутствии измеряемого груза массой га, т.е. Р , измерительная система нагружена собственным весом Р пассивной тары, которая вызывает начальное смещение а х измерительной катушки, что приводит к изменению емкости между пластинами 5, преобразующейся в электрический сигнал ли,д, которьй усиливается, выпрямляется и преобразователем 14 напряжения во временной интервал преобразуется в относительную длительность Ц/Тд, где Tj- период широтно-импульс- ной модуляции,
в течение времени t в измерительной катушке 6 протекает ток 1, среднее значение импульсного тока 1 -, to
Т.
Создает уравиовещива1сяцее усиto
лив F 1,Бд1„гг- , где 1,- длина

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитные весы | 1986 |
|
SU1337671A1 |
| Электромагнитные весы | 1979 |
|
SU838388A1 |
| Электромагнитные весы | 1979 |
|
SU800666A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Электромагнитные весы | 1979 |
|
SU851106A1 |
| Электромагнитные весы | 1979 |
|
SU838389A1 |
| МАНОМЕТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ И ВОСПРОИЗВЕДЕНИЯ МАЛЫХ ДАВЛЕНИЙ ПОРШНЕВОЙ ПАРОЙ, ОБРАЗОВАННОЙ СТРУКТУРНО-СОПРЯЖЕННЫМИ МАГНЕТИКАМИ (ВАРИАНТЫ) | 2011 |
|
RU2489692C1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1352235A1 |
| ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА | 2023 |
|
RU2816442C1 |
| Электромагнитные весы | 1987 |
|
SU1597586A1 |
Изобретение относится к области весоизмерительной техники. Цель изобретения - повышение точности. При наложении груза 3 чувствительный элемент 4 смещается вниз, что вызывает пропорциональное изменение емкости пластин 5, которая преобразуется в напряжение. Оно усиливается и преобразуется в изменение относительной длительности. Среднее значение тока в катушке создает электромагнитные усилия, уравновешивающие силу Р тяжести груза. Измеряемая сила Р пропорциональна .временной длительности и не зависит от индукции. Косоугольный рабочий зазор и обмотка эталонной катушки 11 с переменным по высоте числом слоев витков позволяют эффективно использовать зазор и получить постоянные значения отрицательной жесткости при перемещении катушки до 1 мм и более. Расположение эталонной катушки 11 в зазоре с линейным изменением индукции позволяет обеспечить астатический характер уравновешивания массы эталонной катушки 11. 3 ил. с (Л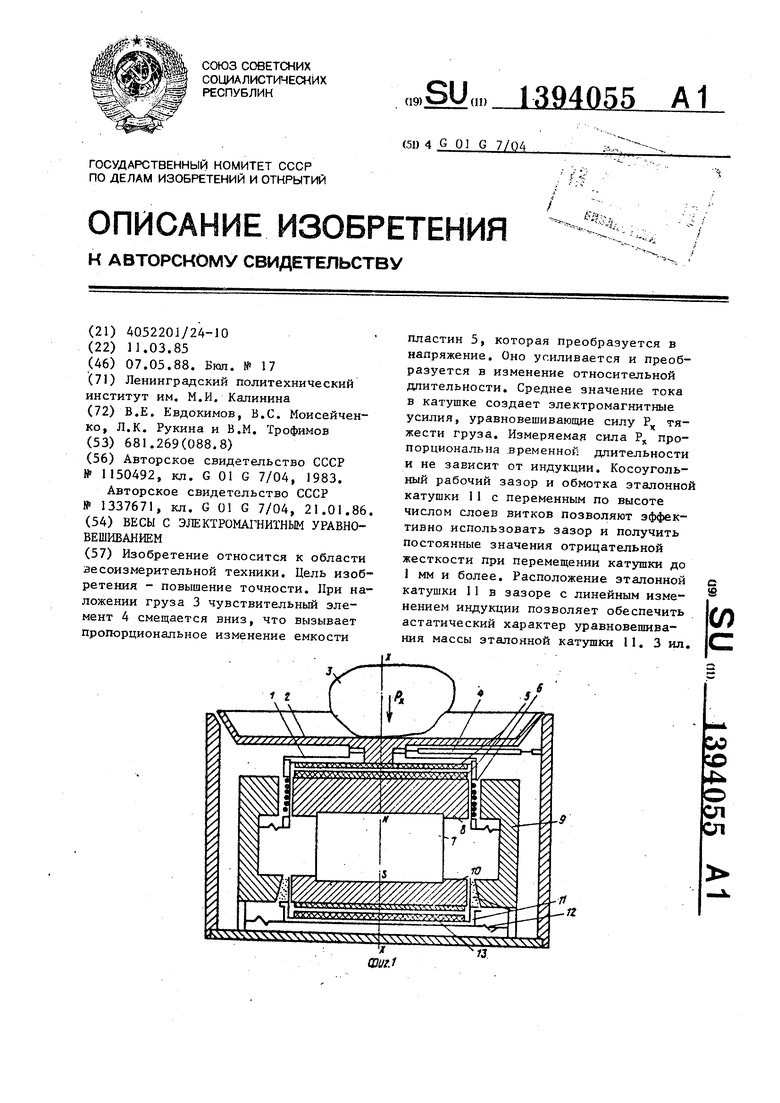
зоре, и высота его h h высоты эталонной катушки (фиг. 3). Под действием заданного постоянного веса Р катушка 11 смещена вниз, и сигнал uU электрода 13 усиливается и преобразукатушки 6.
как
РО ± t
IcKoBo
- 1394055
где+л.- др«йф нуля эталоннойсисте- жек) и обеспечить астатический харакмы уравновешивания,тер уравновешивания веса эталонной
токатушки. При отсутствии жесткостир р 11(РО t &р)эталонная катушка находится в полоТ т 1дКоТджении безразличного равновесия и прио- 1тведенный к входу механический (смещеВ отсчетном приборе 17 счетчик
нне Подвижной части Л х„) дрейф нуля предварительно сбрасывается на число,„ - j
не сказывается на результате преобра- дополнением к которому является число - j
10зования РЛ в ток 1,, так как л„ импульсов, соответствующее длитель- ч
ности t . (o - .
Таким образом, при отсутствии Р, Отсутствие погрешностей дрейфа ну О в отсчетном приборе 17 регистри- этапонной системы уравновешивания
руются нулевые показатели при ±й„ 0. -также и составляющую погреш- При Л f О отсчетный прибор 17 регист- ностк-чувствительности измерительной
рирует этот дрейф, обуславливающий уравновешивания, вызываемую
погрешность нуля.
При наложении груза 3 массой т чувствительный элемент смещается вниз ормула изо регения
9П
на расстояние дх, что вызывает про-
порциональное изменение емкости плас- электромагнитным уравнове- тин 5, которая преобразуется в напря- пшванием, содержащие чувствительный жение ли,. Напряжение iU, усилива- элемент на упругом подвесе с грузо- ется и преобразуется преобразователем , приемной чашкой, магнитную систему 14 в изменение относительной дпитель- постоянного магнита с верхним ности t,/T,. Среднее значение тока в ™ полюсными наконечниками и
магнитопроводом, катушку силовой комкатушке 1у создает электромаг- пенсации, расположенную в кольцевом u,,m ,«« , „ °зазоре между верхним полюсным наконечНИТНОб
1 бР + А ) 30 НИКОМ и магнитопроводом, датчик поло- FH - 1, ВдХдГг- -, „ ™ - , женин чувствительного элемента, эталонную катушку с емкостным датчиком
уравновешивающее силу тяжести Р гру- положения и электрическую схему урав- за, т.е. РХ Гц. Таким образом, изме- новешивания и отсчета, к которой под- ряемый вес Р пропорционален времен- .5 ключены катушка силовой компенсации, ной длительности ty и не зависит от эталонная катушка и датчики положения, индукции В.отличающиеся тем, что.
Косоугольный рабочий зазор и обмот- с целью повьш1ения точности, между ка эталонной катушки с переменным по нижним полюсным наконечником и магни- высоте числом слоев витков позволяет 40 топроводом образован кольцевой зазор эффективно использовать зазор и полу- с линейно меняющейся по высоте шири- чить большие постоянные значения отри- ной, который с внутренней стороны ог- цательной жесткости при перемещениях раничен цилиндрической поверхностью катушки до 1 мм и более. Расположение нижнего полюсного наконечника, а с .эталонной катушки в зазоре с линейным 45 наружной стороны - поверхностью усе- изменением индукции позволяет за счет ченного конуса, при этом эталонная отрицательной жесткости скомпенсиро- катушка вьшолнена с линейно изменя- вать практически полностьк механичес- ющимся числам витков в слое и распо- кую жесткость упругого подвеса (растя- ложена в этом зазоре.
;/
4
VUti
s
h
t-
ho
&B
Фиг.з
| Электромагнитные весы | 1983 |
|
SU1150492A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электромагнитные весы | 1986 |
|
SU1337671A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
