11
Изобретение относится к горному делу, а именно к автоматического управлению режимом работы горных машин
Целью изобретения является повышение безопасности труда при работе комбайна в очистных забоях со слабыми кровлями и произво;1 1тельности комбайна за счет устранения времени на ликвидацию последствий обрушения.
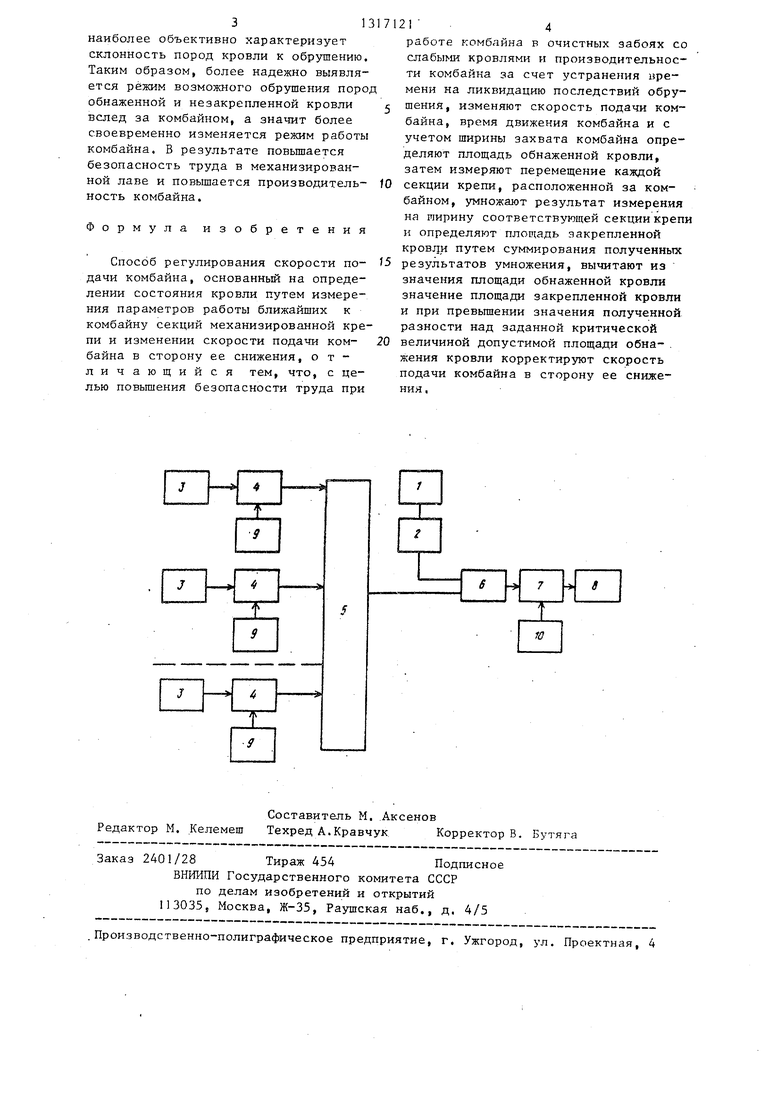
. На чертеже представлена структурная схема устройства для осуществления способа регулирования скорости подачи комбайна,
Устройство включает датчик 1 скорости комбайна, интегратор 2 датчики 3 перемещения секций крепи, блоки 4 умножения, первый сумматор 5, второй сумматор 6, элемент 7 сравнения, исполнительный элемент 8,, источники 9,10 опорного сигнала. Причем входы каждого блока 4 умножения присоединены к соответствующим датчикам 3 перемещения и блокам 9 опорного сигнала, а выходы всек бло ков 4 умножения присоединены к входам первого сумматора 5, выход ко-- торого присоединен к первому входу второго сумматора б, к второму входу которого присоединен выход интегратора 2, к входу которого присоединен выход датчика 1 скорости подачи комбайна. Выход второго сумматора 6 присоединен с первому входу элемента 7 сравнения, к второму входу которого присоединен выход источника 10 опорного сигнала. Выход элемента 7 сравнения присоединен к исполнительному элементу 8,
Способ регулирования скорости подачи комбайна осуществляется следующим образом,
При работе комбайна по выемке угля сигнал с датчика 1 скорости поступает на вход интегратора 2, сигнал на выходе которого определяется по формуле
(1)
2„ BJV,. dt,
где В - ширина захвата комбайна;
V - скорость подачи комбайна;
tn - время движения комбайна, и пропорционален площади обнажения кровли.
Сигнал на выходе каждого блока 4 умножения пропорционален величине площади крепления кровли соответствующей секции т; 1, где Ш; - пе12.
перемещение секции i-й крепи; 1; - ширина секции крепи,
перемещения получается с выхода датчиков 3 перемещения а сигнал, пропорциональный ширине секции крепи а устанавливается на выход источника 9 соответствующего опорного сигнала.
На выходе первого сумматора 5 сигнал пропорционален площади крепления
п
(2)
SKP SIm.l..
1
где п - число секции крепи.
На выходе сумматора б получаем сигнал, пропорциональный разности Зр-Зцр, т.е, фактической площади обнажения непосредственной кровли вслед за комбайном. В элементе 7
сравнения сигнал, пропорциональный площади обнажения кровли вслед за комбайном, сравнивается с заданной величиной, устанавливаемой сигналом (i выхода источника 10 опорного сигнала, и, если фактическая площадь обнажения кровли превышает заданную, то на выходе элемента 7 сравнения появляется сигнал, который через исполнительный орган 8 воздействует
на скорость подачи комбайна, корректируя ее в сторону снижения. При этом При сохранении скорости крепления уменьшается скорость обнажения кровли и уменьшается площадь обнаженной непосредственной кровли вслед за комбайном. При достижении площади обнаженной кровли заданной или уменьшении ее меньше заданной сигнал на выходе элемента 7 сравнения исчезнет, а исполнительный элемент 8 обеспечи
вает повьш1ение скорости подачи комбайна.
Анализ причин и условий внезапных обрушений и вывалов горных пород показал, что они наиболее часто происходят в результате запоздалой установки крепи, вследствие чего при продолжении выемки увеличивается площадь обнаженной кровли. Причем существует критическая величина площади обнажения неза:крепленной кровли, при превышении которой происходит обрушение пород кровли,
В предложенном способе обеспечи- 5-5 вается прямой контроль площади обнажения непосредственной кровли вслед за проходом комбайна, параметр которой в условиях слабых пород кровли
наиболее объективно характеризует склонность пород кровли к обрушению. Таким образом, более надежно выявляется режим возможного обрушения поро обнаженной и незакрепленной кровли вслед за комбайном, а значит более своевременно изменяется режим работы комбайна, В результате повышается безопасность труда в механизированной лаве и повышается производительность комбайна.
Формула изобретения
Способ регулирования скорости подачи комбайна, основаиньй на определении состояния кровли путем измерения параметров работы ближайших к комбайну секций механизированной крепи и изменении скорости подачи ком- байна в сторону ее снижения, отличающийся тем, что, с целью повышения безопасности труда при
Составитель М. Аксенов Редактор М, Келемеш Техред А.Кравчук, Корректор В. Бутя га
Заказ 2401/28 Тираж 454Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
10
20
17121 4
работе комбайна в очистных забоях со слабыми кровлями и производительности комбайна за счет устранения времени на ликвидацию последствий обрушения, изменяют скорость подачи комбайна, время движения комбайна и с учетом ширины захвата комбайна определяют площадь обнаженной кровли, затем измеряют перемещение каждой секции крепи, расположенной за ком- байном, умножают результат измерения на ширину соответствующей секции крепи и определяют площадь закрепленной KpoBJ H путем суммирования полученньтх результатов умножения, вычитают из значения площади обнаженной кровли значение площади закрепленной кровли и при превышении значения полученной разности над заданной критической величиной допустимой площади обна- . жения кровли корректируют скорость подачи комбайна в сторону ее снижения ,
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля величины обнажения кровли | 1983 |
|
SU1213193A1 |
| СПОСОБ КАРИМАНА ПОДЗЕМНОЙ РАЗРАБОТКИ ИСКОПАЕМЫХ | 2003 |
|
RU2269003C2 |
| Способ управления кровлей в очистном забое с механизированной крепью | 1988 |
|
SU1671888A1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС | 1992 |
|
RU2068098C1 |
| СПОСОБ РАЗРАБОТКИ ПОЛОГОГО УГОЛЬНОГО ПЛАСТА | 2004 |
|
RU2273733C1 |
| СПОСОБ КРЕПЛЕНИЯ КРОВЛИ В ОЧИСТНЫХ ЗАБОЯХ | 1997 |
|
RU2134789C1 |
| СПОСОБ КОНТРОЛИРУЕМОГО СОБЛЮДЕНИЯ ЗАЗОРА МЕЖДУ ВЕРХНИМ ПЕРЕКРЫТИЕМ И УГОЛЬНЫМ ЗАБОЕМ В ОЧИСТНЫХ ЗАБОЯХ | 2008 |
|
RU2470156C2 |
| Секция механизированной крепи | 1983 |
|
SU1245711A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2013 |
|
RU2543245C2 |
| СПОСОБ ПОДДЕРЖАНИЯ СОПРЯЖЕНИЙ ЛАВЫ С ОКОНТУРИВАЮЩИМИ ВЫЕМОЧНЫЙ СТОЛБ ВЫРАБОТКАМИ В ЗОНАХ ЛЕГКООБРУШАЕМОЙ КРОВЛИ | 1992 |
|
RU2047764C1 |
Изобретение относится к автоматическому управлению режимом работы горных машин. Цапь изобретения - повышение безопасности труда при работе комбайна (К) в очистных забоях со слабыми кровлями, и производитель.ности К за счет устранения времени на ликвидацию последствий обрушения. Способ обеспечивает прямой контроль площади S обнажения непосредственной кровли вслед за проходом К, которая наиболее объективно характеризует склонность пород кровли к обрушению. Для этого измеряют ширину В захвата К, скорость V подачи К и время ta движения к. При этом . Затем измеряют перемещение т каждой .-и секции, расположенной за;К, умножают ее на ширину 1, зтой секции и определяют площадь S кр 1;, где п закрепленной число кровли S р 2Z. и, г секций кровли. Фактическую площадь обнажения непосредственной кровли за К определяют по разности Зд-З, Сравнивают эту разность с заданной критической допустимой площадью обнажения кровли. Если больше заданной, то корректируют скорость К в сторону ее снижения. 1 ил. е S (Л :о таЛ. tsD 
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ УГЛЕДОБЫВАЮЩИХ МАШИН | 1966 |
|
SU214463A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Однопроцессный способ изготовления например, женских носков | 1952 |
|
SU96839A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
