113
Изобретение относится к автоматическому управлению, может найти применение в устройствах, предназначенных для привода синхронных генераторов транспортных средств и является дополнительным изобретением к основному авт. св. К 1160380.
Цель изобретения - повьппение точности устройства.
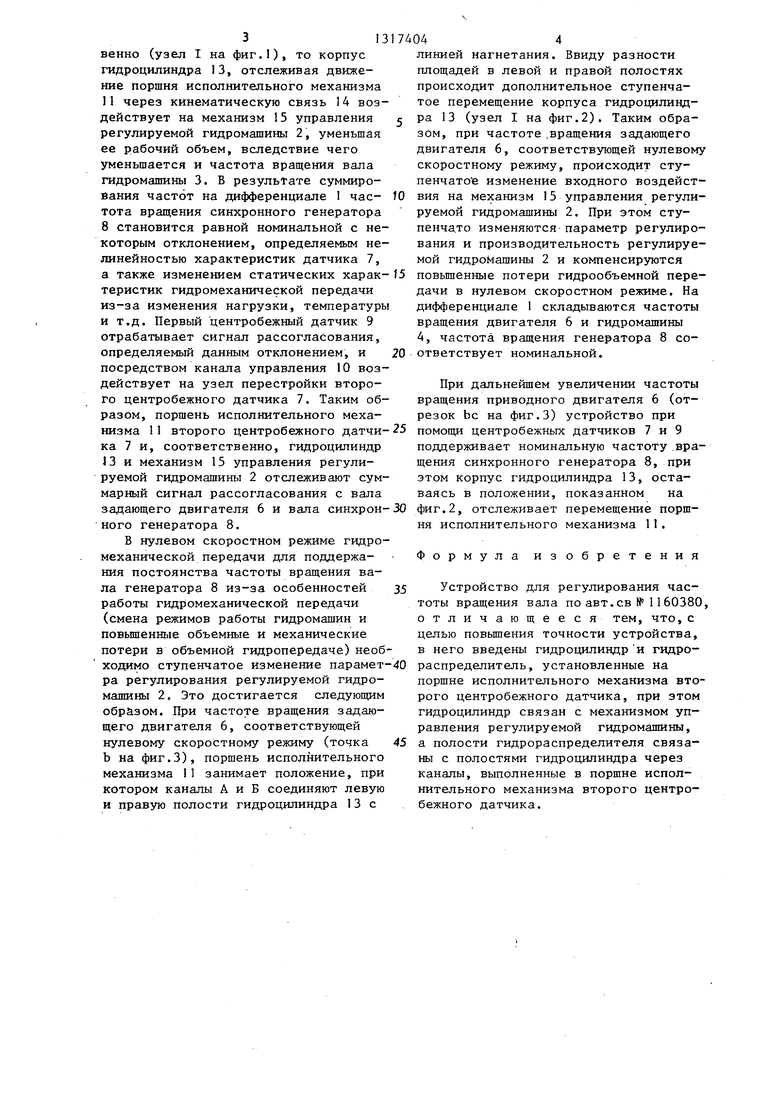
На фиг.1 изображена принципиальная схема предлагаемого устройства; на фиг.2 - узел I на фиг.1 (узел гидроусилителя и гидрораспредзлителя); на фиг.З - статические регулировоч- jHbie характеристики.
Устройство для регулирования час- готы вращения вала (фиг.1 и 2) содер кит трехзвенный дифференциал 1 и замкнутую объемную гидропередачу, состоящую из регулируемой гидромашины 2 и гидромашины 3, связанных между собою силовыми гидролиниями 4 и 5 Первое звено дифференциала I связано с задающим двигателем 6 и вторым центробежным датчиком 7. Второе звено дифференциала 1 связано с валом гидромашины 3, а третье - с синхронным генератором 8, ротором регулируемой гидромашиной 2 и первым центробежным датчиком 9, который в свою очередь соединен каналом 10 управления с узлом перенастройки второго центробежного датчика 7. Поршень исполнительного механизма 11 второго центробежного датчика 7 является одновременно золотником гидрораспределителя 12 и поршнем гидроцилиндра 13 корпус которого через кинематическую связь 1А связан с механизмом 15 управления регулируемой гидромашины 2, Гидрораспределитель 12 связан каналами А и Б с левой и правой полостями гидроцилиндра 13 соответственно.
Устройство работает следующим образом.
При изменении частоты вращения задающего двигателя 6, например возрастании (отрезок аЬ на фиг.З), происходит согласованное изменение параметра регулирования регулируемой гидромашины 2 и передаточного отношения гидромеханической передачи соответственно изменению частоты вращения задающего двигателя 6 и сигналу рассогласования действительной и номинальной частот вращения синхронного генератора 8. В нулевом скоростном режиме (точка b на фиг.З) осу42
ществляют ступенчатое изменение параметра регулирования регулируемой гидромашины 2, амплитуда которого определяется величиной потерь в гидрообъемной передаче. При этом ступенчато изменяется частота.вращения гидромашины 3. На дифференци.але 1 складываются частоты вращения задающего двигателя 6 и гидромашин1л 3, частота вращения синхронного генератора 8 соответствует номинальной. При дальнейшем возрастании частоты вращения двигателя 6 (отрезок be на фиг.З) опять осуществляется согласованное изменение параметра регулирования регулируемой гидромашины 2 и передаточного отношения гидромеханической передачи соответственно изменению частоты вращения задающего двигателя 6 и сигналу
рассогласования действительной и номинальной частот вращения синхронного генератора 8. Таким образом на всем диапазоне изменения частоты вращения задающего двигателя 6 (отрезок ас на
фиг.З) частота вращения синхронного генератора 8 соответствует номинальной .
При установившейся частоте приводного двигателя 6, например минимальной (отрезок od на фиг.З), рабочая жидкость из линии нагнетания поступает по каналу Б в правую полость гидроцилиндра 13 и вытесняется по каналу А из левой полости на слив. Гидроцилиндр 13 занимает положение, показанное на фиг.1, воздействуя при зтом через кинематическую связь 14 на механизм 15 управления, который устанавливается в положение, соответствующее частоте вращения задающего двигателя 6. Регулируемая гидромашина 2 приводит во вращение вал гидромашины 3, на дифференциале 1 происходит суммирование частот вращения задающего двигателя 6 и вала гидромашины 3. Частота вращения синхронного генератора 8 соответствует номинальной.
При изменении частоты вращения задающего двигателя 6, например возрастания (отрезок аЬ на фиг.З), изменяется частота вращения второго центробежного датчика 7. Поршень исполнитеп;ьного механизма :1 1 в данном случае движется влево. Так как на данном режиме левая и правая полости гидроцилиндра 13 остаются соединенными с линиями слива и нагнетания соответственно (узел I на фиг.1), то корпус гидроцилиндра 13, отслеживая движение поршня исполнительного механизма 11 через кинематическую связь 14 воздействует на механизм 15 управления регулируемой гидромашины 2, уменьшая ее рабочий объем, вследствие чего уменьшается и частота вращения вала гидромашины 3. В результате суммирования частот на дифференциале 1 час- тота вращения синхронного генератора 8 становится равной номинальной с некоторым отклонением, определяемым нелинейностью характеристик датчика 7, а также изменением статических характеристик гидромеханической передачи из-за изменения нагрузки, температуры и т.д. Первый центробежный датчик 9 отрабатывает сигнал рассогласования, определяемый данным отклонением, и посредством канала управления 10 воздействует на узел перестройки второго центробежного датчика 7. Таким образом, поршень исполнительного механизма 11 второго центробежного датчи- ка 7 и, соответственно, гидроцилиндр J3 и механизм 15 управления регулируемой гидромащины 2 отслеживают суммарный сигнал рассогласования с вала задающего двигателя 6 и вала синхрон- ного генератора 8.
В нулевом скоростном режиме гидромеханической передачи для поддержания постоянства частоты вращения вала генератора 8 из-за особенностей работы гидромеханической передачи (смена режимов работы гидромашин и повьш1енные объемные и механические потери в объемной гидропередаче) необходимо ступенчатое изменение парамет ра регулирования регулируемой гидромашины 2, Это достигается следующим образом. При частоте вращения задающего двигателя 6, соответствующей нулевому скоростному режиму (точка Ъ на фиг.З), поршень исполнительного механизма 11 занимает положение, при котором каналы А и Б соединяют левую и правую полости гидроцилиндра 13с
линией нагнетания. Ввиду разности площадей в левой и правой полостях происходит дополнительное ступенчатое перемещение корпуса гидроцилиндра 13 (узел I на фиг.2). Таким образом, при частоте .вращения задающего двигателя 6, соответствующей нулевом скоростному режиму, происходит сту- пенчато е изменение входного воздействия на мехаьшзм I5 управления регулируемой гидромашины 2. При этом ступенчато изменяются параметр регулирования и производительность регулируемой гидромашины 2 и компенсируются повыщенные потери гидрообьемной передачи в нулевом скоростном режиме. На дифференциале 1 складываются частоты вращения двигателя 6 и гидромашины 4, частота вращения генератора 8 соответствует номинальной.
При дальнейшем увеличении частоты вращения приводного двигателя 6 (отрезок be на фиг.З) устройство при помощи центробежных датчиков 7 и 9 поддерживает номинальную частоту .вращения синхронного генератора 8, при этом корпус гидроцилиндра 13, оставаясь в положении, показанном на фиг.2, отслеживает перемещение поршня исполнительного механизма 11.
Формула изобретения
Устройство для регулирования частоты вращения вала по авт. ев № 11 60380 отличающееся тем, что, с целью повышения точности устройства, в него введены гидроцилиндр и гидрораспределитель, установленные на поршне исполнительного механизма второго центробежного датчика, при этом гидроцилиндр связан с механизмом управления регулируемой гидромашины, а полости гидрораспределителя связаны с полостями гидроцилиндра через каналы, выполненные в порщне исполнительного механизма второго центробежного датчика.
f 1
f ozHe/na t/e Слив
J
Фиг.г
4i«,M-,iVv,
,.
tar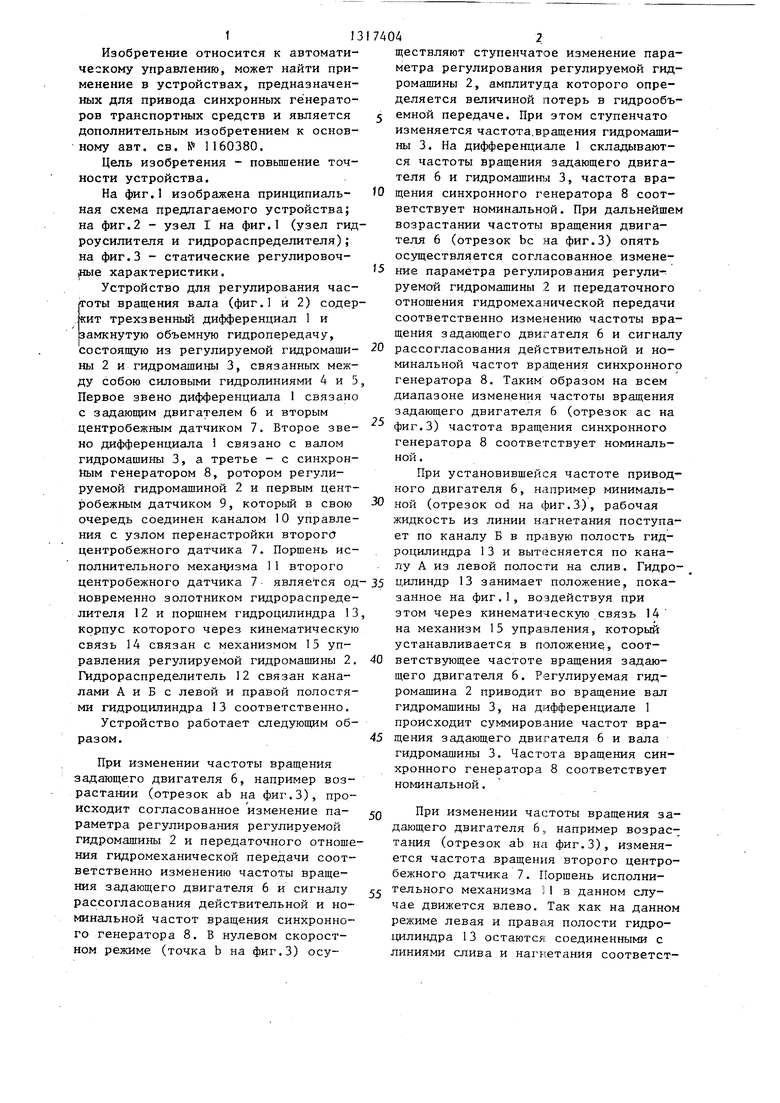
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения вала | 1983 |
|
SU1160380A1 |
| Привод постоянной частоты вращения вала | 1988 |
|
SU1552151A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| Устройство для автоматического поддержания стабильной частоты вращения синхронного генератора | 1979 |
|
SU855298A1 |
| Устройство для автоматическогопОддЕРжАНия СТАбильНОй чАСТОТыВРАщЕНия ВыВОдНОгО ВАлА гидРОМЕХАНичЕСКОйпЕРЕдАчи | 1978 |
|
SU794282A1 |
| Система приводов трактора | 1983 |
|
SU1131686A1 |
| Устройство для автоматического поддержания числа оборотов выводного вала гидромеханической передачи | 1977 |
|
SU700729A1 |
| Гидропривод с расширенным диапазоном регулирования скорости | 2024 |
|
RU2841596C1 |
| Стенд для испытаний объемных гидромеханических передач на неустановившихся режимах работы | 1989 |
|
SU1707303A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
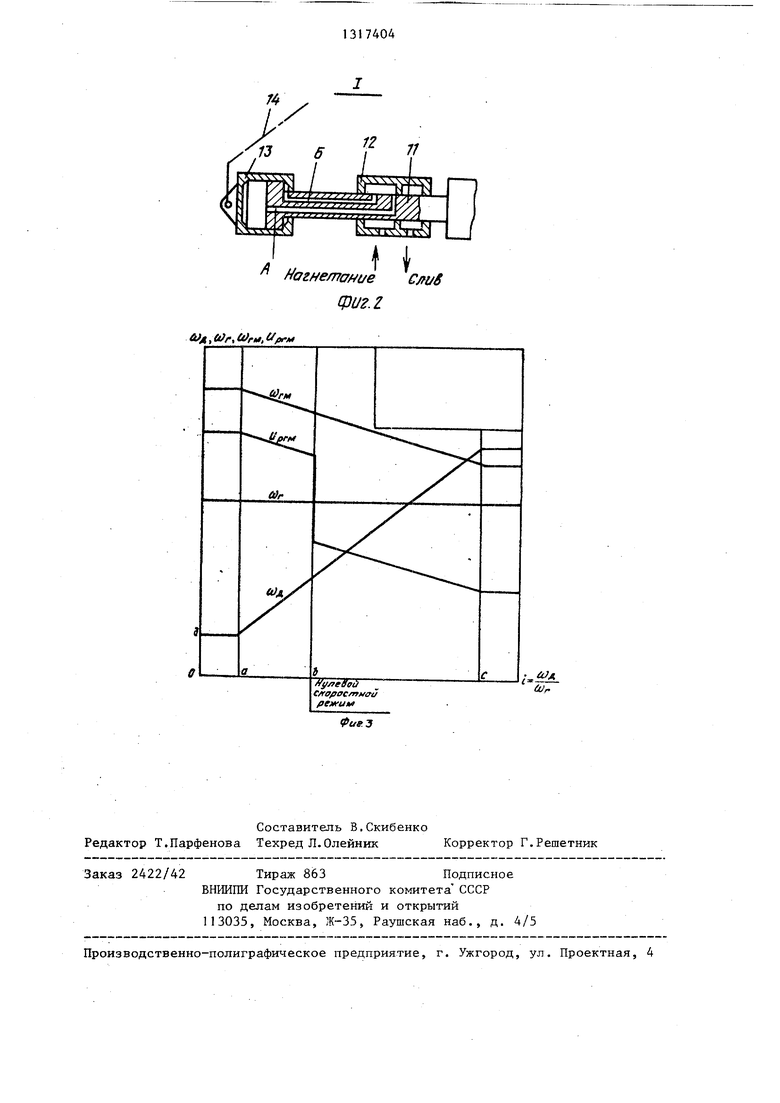
Изобретение относится к автоматическому управлению, может быть применено в устройствах, предназначенных для привода синхронных генераторов, и является дополнительным к . основному авт. св. № 1160380. Цель изобретения - повьшение точности уст ройства. В нулевом скоростном режиме гидромеханической передачи осуществляется ступенчатое изменение параметра регулирования гидромашиш, для чего введены гидроцилиндр 13 и гидро распределитель 12, при этом полости гидрораспределителя гидравлически связаны с полостями гидроцилиндра через каналы А и Б, выполненные в поршне исполнительного механизма вто рого центробежного датчика. 3 ил. ig (Л д 4; 14)
| Устройство для регулирования частоты вращения вала | 1983 |
|
SU1160380A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
