Изобретение относится к автоматическому управлению и может быть ис- Иольэовано в устройствах, предназначенных для приводов синхронных гене- раторов транспортных средств.
Целью изобретения является повышение точности привода постоянной частоты вращения за счет уменьшения задержки сигнала управления путем исключения одного гидроусилительного (элемента из системы управления привода.
На чертеже изображена схема привода.
Привод состоит из трехзвенного дифференциала 1, регулируемой 2 и не- регулируемой 3 гидромашин, соединенных между собой гидролкниями, механизма управления регулируемой гидро- ,машины 4, состоящего из двуплечего ,рычага 5 и присоединенных к нему гидроцилиндров 6, гидроцилиндра 7 обратной связи и двух центробежных регуля- i торов . Первый центробежный регулятор 8 состоит из блока вращающихся грузиков 9, золотника 10, который через пружину 11 опирается на поршень узла 12 перенастройки, поршень дополни- телъно подпружинен пружиной 13. Вто- рой центробежный регулятор 14 состоит из блока 15 вращающихся грузиков, золотника 16, который через пружину 17 опирается на регулировочный винт 18. С входным звеном 19 диффе- ренциала соединены первый центробежный регулятор 8 и приводной двигатель 20, с выходным звеном 21 соединен второй центробежный регулятор и синхронный генератор 22, вал регулируе- мой гидромашины 2 может быть соединен как с входным, так и с выходным звеном, с третьим эвеном 23 соединен вал нерегулируемой гидромашины 3.
Полости гидроцилиндров 6 соедине- ны гидролиниями 24 и 25 с золотником первого регулятора 10. Запоршневое пространство узла 12 перенастройки первого регулятора соединено гидролиниями 26 и 27 с золотником 16 второ- го регулятора и гидроцилиндром 7 обратной связи.
Привод постоянной частоты вращени работает следующим образом.
В установившемся режиме, соответ- ствующем настройке регуляторов 8 и 14, их золотники 10 и 16 находятся в нейтральном положении, я механизм 4 управления регулируемой гидромапганы
поддерживает требуемое передаточное отношение объемной гидромеханической передачи, соответствующее отношению частоты вращения двигателя 20 и генератора 22.
При увеличении частоты вращения двигателя 20 грузики 9 регулятора 8 расходятся под действием центробежной силы и смещают золотник 10 из нейтрального положения вправо по схеме. Гидролиния 24 соединяется с напорной магистралью, гидролиния 25 - со сливной, при этом в гидроцилиндрах 6 возникает разность давления, под действием которой двуплечий рычаг 5 механизма 4 управления поворачивается вокруг своей оси (по часовой стрелке по схеме), при этом гидроцилиндр 7 обратной связи вытесняет рабочую жидкость в гидролинию 27 и перемешает поршень узла 1 2 перенастрой ки навстречу движению золотника ТО, и через пружину 1J устанавливает золотник 10 в нейтральное положение. При уменьшении частоты вращения Двигателя 20 грузики 9 сходятся, и зо - лотник 10 смещается влево по схеме. Гидролиния 24 соединяется со сливной магистралью, а гидролиния 25 - с напорной, при этом за счет разности давлений в гидроцилиндрах 6 двуплечий рычаг 5 поворачивается в противоположном направлении. Под действием пружины 13 поршень 12 смещается вправо по схеме и вытесняет рабочую жидкость по гидролинии 27 в полость освобождаемую гидроцилиндром 7 обратной связи. Натяжение пружины 1 1 ослабевает и под действием центробежно силы грузиков 9 золотник 10 возвращается в нейтральное положение.
Гидролинии 24 и 25 отсекаются от питания и слива, двуплечий рычаг 5 мханизма управления останавливается в положении, при котором передаточное отношение гидромеханической передачи изменяется настолько, чтобы поддержать частоту вращения выходного вала 21 близкой к номинальной.
Вследствие нелинейности характеристик гидромеханической передачи, упругости трубопроводов, большой инерционности генератора 22 частота вращения выходного вала 21 будет от личаться от номинальной. В случае ее увеличения грузики 15 регулятора 14 под действием центробежной силы сместят золотник 16 из нейтрального
51
положения вправо по схеме, при этом гидролиния 26 соединится со сливом и поршень узла 12 перенастройки под действием пружины 13 сместится от золотника 10 регулятора 8, в результате чего ослабнет сила натяжения пружины 11, и золотник 10 смесятся из нейтрального положения вправо. Рабочая жидкость поступает в механизм управления и поворачивает его по часовой стрелке. Изменяется общее передаточное отношение гидрообъемной передачи и частота вращения выходного вала 21 возвращается к номинальной, при этом центрбежная сила грузиков 15 уменьшается и золотник 16 вернется в нейтральное положение. Одновременно гидроцилиндр 7 обратной
связи, вытесняя рабочую жидкость в
гидролинию 27, смещает поршень узла 12 пе ренас тройки в сторону эолотника 10 и возвращает его в нейтральное положение . В случае снижения частоты вращения выходного вала 21 грузики 15 сближаются, золотник 16 смещается влево, гидролиния 26 соединяется с напорной гидролинией, поршень 12 перемещается влево, смещая золотник 10 также влево. Рабочая жидкость поступает в механизм 4 управления и поворачивает его против часовой стрелки по схеме. Изменяется общее передаточное отношение гидрообъемной пе- педачи, и частота вращения выходного вала 21 возвращается к номинальному, при этом золотник 16 возвращается в нейтральное положение, и под действием гидроцилиндра 7 обратной связи золотник 10 тоже возвращается в нейт- ральное положение.
Формула изоб р-е тения Привод постоянной частоты вращения вала, содержащий трехзвенный диффе
C
5
0
0
5 0
5
5J
ренциал, регулируемую и нерегулируемую гидромашины, соединенные между собой гндролнниямн, механизм управления регулируемой гидромагаины, состоящий из двуплечего рычага с кинематически присоединенными к нему гидроцилиндрами, первый центробежный регулятор, состоящий из блока вращающихся грузиков, золотника и узла перенастройки, причем блок вращающихся грузиков связан с золотником, подпружиненным относительно узла перенастройки, второго центробежного регулятора, состоящего из блока вращ :ощихся грузиков и золотника, связанных между собой, причем первое ЗВРНО дифференциала - входное - соединено с блоком вращающихся грузиков первого центробежного регулятора, второе звено - выходное - соединено с блоком пра- щающихсч грузиков второго центробежного регулятора , третье звено соединено с валом нерегулируемой гидромашины, вал регулируемой гидромашины соединен с первым или с вторым звеном дифференциала, узел перенастройки первого центробежного регулятора гидравлически связан с золотником второго центробежного регулятора, отличающийся тем, что, с целью повышения точности привода постоянной частоты вращения за счет уменьшения задержки сигнала управления путем исключения одного гидроусилительного элемента из системы управления привода, гидроцилиндры механизма управления гидравлически связаны с выходом золотника первого центробежного регулятора, двуплечий рычаг механизма управления связан с гидроцилиндром обратной связи, соединенным гидроли- - нией с узлом перенастройки первого центробежного регулятора.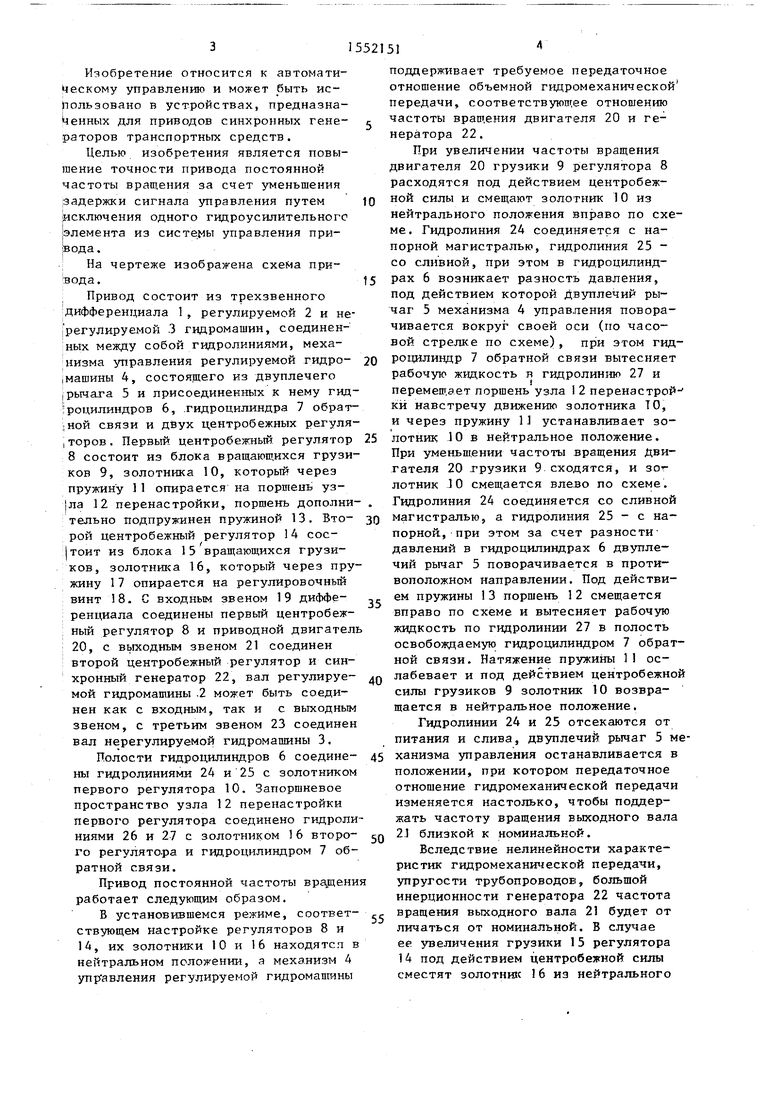

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения вала | 1983 |
|
SU1160380A1 |
| Гидромеханический ходоуменьшитель землеройной машины | 1983 |
|
SU1089214A1 |
| Устройство для регулирования частоты вращения вала | 1986 |
|
SU1317404A2 |
| Устройство для автоматического поддержания стабильной частоты вращения синхронного генератора | 1979 |
|
SU855298A1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| Гидромеханический ходоуменьшительдля зЕМлЕРОйНОй МАшиНы | 1979 |
|
SU819285A1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
| Гидрообъемный ходоуменьшитель транспортного средства | 1980 |
|
SU878612A1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ ГИДРОМАШИНА С РЕГУЛИРУЕМЫМ РАБОЧИМ ОБЪЕМОМ | 2004 |
|
RU2275531C1 |
| Ходоуменьшитель транспортного средства | 1980 |
|
SU925689A2 |
Изобретение относится к автоматическому управлению и может быть использовано в устройствах, предназначенных для приводов синхронных генераторов транспортных средств. Цель изобретения - повышение точности привода постоянной частоты вращения за счет уменьшения задержки сигнала управления путем исключения одного гидроусилительного элемента из системы управления привода. Привод состоит из: трехзвенного дифференциала 1, регулируемой 2 и нерегулируемой 3 гидромашин, механизма 4 управления регулируемой гидромашины, двуплечего рычага 5, гидроцилиндров 6, гидроцилиндра обратной связи 7, первого центробежного регулятора 8, блока 9 вращающихся грузиков, золотника 10, пружины 11, поршня 12 узла перенастройки, пружины 13, второго центробежного регулятора 14, блока 15 вращающихся грузиков , золотника 16, пружины 17, винта 18, входного звена 19 дифференциала 19, приводного двигателя 20, выходного звена 21 дифференциала, синхронного генератора 22, третьего звена 23 дифференциала, гидролиний 24 - 27. 1 ил.
| Объемные гидромеханические передачи: расчет и конструирование/ /Под ред | |||
| Е.С.Кисточкина.-Л.: Машиностроение, 1987, с | |||
| Аппарат для передачи фотографических изображений на расстояние | 1920 |
|
SU170A1 |
| ГИДРОМЕТРИЧЕСКАЯ ВЕРТУШКА | 1939 |
|
SU60380A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
