Изобретение относится к автоматическому управлению и может найти применение в устройствах, предназначенных для привода синхронных генераторов транспортных средств.
Цель изобретения - повышение точности устройства в переходных режимах при изменении частоты вращения задающего двигателя или нагрузки на генератор.
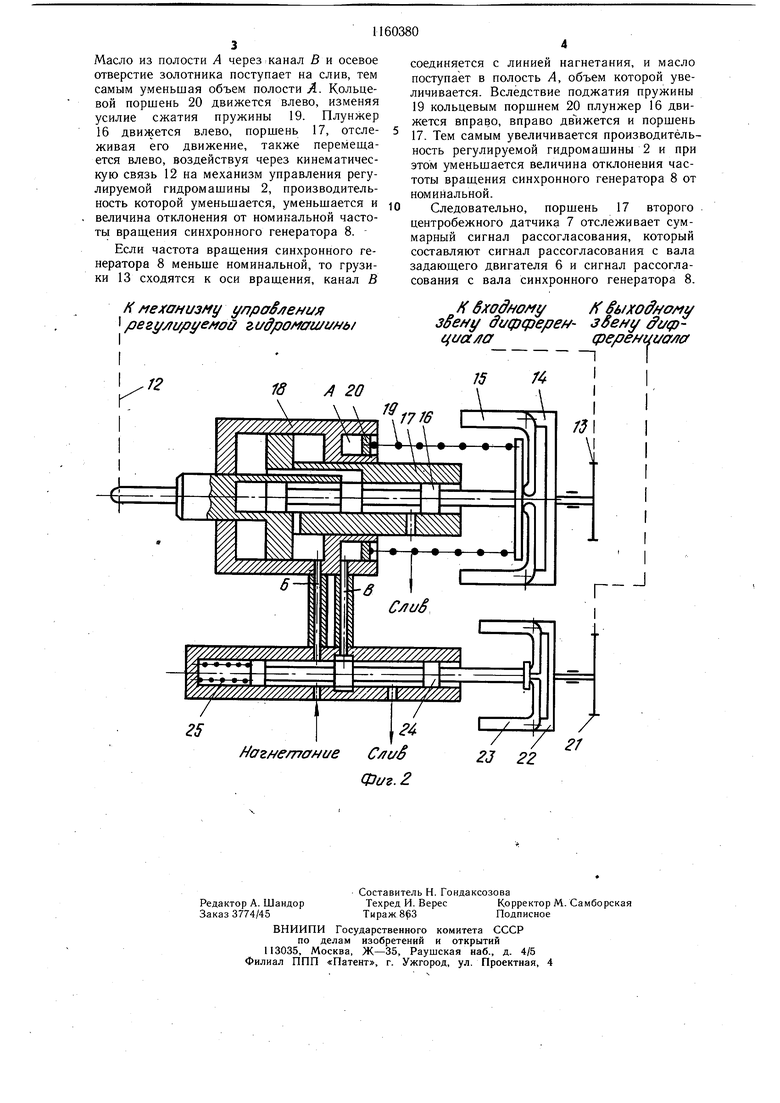
На фиг. 1 изображена принципиальная кинематическая схема устройства; на фиг. 2 - схема первого и второго центробежных датчиков.
Устройство содержит трехзвенный дифференциал 1 и замкнутую объемную гидропередачу, состоящую из регулируемой гйдромащины 2 и -гидромащины 3, связанных между собою силовыми гидролиниями 4 и 5. Первое звено трехзвенного дифференциала 1 связано с задающим двигателем 6 и вторым центробежным датчиком 7. Второе звено дифференциала 1 связано с валом гидромашины 3, а третье - с синхронным генератором 8, ротором регулируемой гидромащины 2 и первым центробежным датчиком 9, который, в свою очередь, соединен каналом
управления - гидролиниями 10 и 11 - с узлом перенастройки второго центробежного датчика 1. Исполнительный механизм датчика 7 посредством кинематической связи 12 соединен с механизмом управления регулируемой гидромашины 2.
Привод второго центробежного датчика 7 осуществляется через зубчатое колесо 13, связанное с водилом 14 грузиков 15, нижние концы которых опираются на плунжер 16, который расположен внутри порщня 1.7 (исполнительного механизма) сервомотора 18. Узел перенастройки датчика 7 состоит из пружины 19, опирающейся одним концом на плунжер 16, а другим - на кольцевой порщень 20, положение которого, и соответственно сжатие пружины 19, определяется объемом масла в полости Л.
Привод первого центробежного датчика 9 осуществляется через зубчатое колесо 21, связанное с водилом 22 грузиков 23, нижние концы которых поджаты к плунжеру 24 пружиной 25. Осевое отверстие золотника соединено каналом управления - гидравлическими каналами Б и В с порщневой полостью сервомотора 17 и полостью А соответственно.
Устройство для регулирования частоты вращения вала работает следующим образом.
При установившейся частоте вращения задающего двигателя 6, например минимальной, грузики 23 первого датчика 9 находятся в нейтральном положении, поясок плунжера 24 перекрывает канал В. Положение грузиков 15 второго датчика 7 определяется величиной центробежной силы вращения грузиков и силой поджатия пружины 19. Порщень 17 занимает положение, соответствующее положению плунжера 16 и через кинематическую связь 12 воздействует на механизм управления регулируемой гидромащины 2, устанавливая ее рабочий объем соответственно частоте вращения задающего двигателя 6. Регулируемая гидромащина 2, работающая в данном случае в насосном режиме, приводит во вращение вал гидро машины, 3. На зубчатом дифференциале 1 происходит суммирование частот вращения задающего двигателя 6 и гидромащины 3. Частота вращения синхронного генератора 8 соответствует номинальной с некоторым
5 отклонением, определяемым упругостью силовых гидролиний 4 и 5, а также инерционностью генератора 8 и присоединенных звеньев дифференциала 1.
При возрастании частоты вращения задающего двигателя 6 возрастает частота
вращения зубчатого колеса 13 и соответственно водила 14, увеличивается центробежная сила грузиков 15, пружина 19 сжимается. В этом случае плунжер 16 перемещается влево, порщень 17, отслеживая его движение, также перемещается влево и через кинематическую связь 12 воздействует на механизм управления регулируемой гидромащины 2, уменьшая ее рабочий объем, вследствие чего уменьщается частота вращения гидромащины 3. Частота вращения синхронного генератора 8 становится равной номинальной с некоторым отклонением.
Так как зависимость перемещения порщня 17 от частоты вращения зубчатого колеса 13 и соответственно задающего двигателя 6 близка к линейной, и к линейной также близка регулировочная характеристика гидромеханической передачи (зависимость угла наклона управляюшего органа механизма управления регулируемой гидромашины 2 от частоты вращения задающего двигателя 6),
0 то подбором передаточного отношения кинематической связи 12 обеспечивается примерное постоянство частоты вращения синхронного генератора 8 с некоторым отклонением на всем диапазоне изменения частоты вращения задающего двигателя 6.
Таким образом, вследствие нелинейности характеристик второго центробежного датчика 7, а также изменения статических характеристик гидромеханической передачи из-за изменения нагрузки, температуры и
0 т.д., частота вращения синхронного генератора 8 отклоняется от номинальной в определенных пределах. Первый центробежный датчик 9 отрабатывает этот сигнал рассогласования следующим образом.
В случае превышения частоты вращения синхронного генератора 8 номинальной, грузики 23 датчика 9 расходятся, перемещая плунжер 24 влево и открывая канал В. Масло из полости А через канал В и осевое отверстие золотника поступает на слив, тем самым уменьшая объем полости Л. Кольцевой поршень 20 движется влево, изменяя усилие сжатия пружины 19. Плунжер 16 движется влево, поршень 17, отслеживая его движение, также перемещается влево, воздействуя через кинематическую связь 12 на механизм управления регулируемой гидромашины 2, производительность которой уменьшается, уменьшается и величина отклонения от номинальной частоты вращения синхронного генератора 8. Если частота вращения синхронного генератора 8 меньше номинальной, то грузики 13 сходятся к оси вращения, канал В К механизму управления I рег1// ируемо1} г(/дро/ ашинь/ Нагне/77анае C Ф соединяется с линией нагнетания, и масло поступает в полость А, объем которой увеличивается. Вследствие поджатия пружины 19 кольцевым поршнем 20 плунжер 16 движется вправо, вправо движется и поршень 17. Тем самым увеличивается производительность регулируемой гидромашины 2 и при этом уменьшается величина отклонения частоты вращения синхронного генератора 8 от номинальной. Следовательно, поршень 17 второго центробежного датчика 7 отслеживает суммарный сигнал рассогласования, который составляют сигнал рассогласования с вала задающего двигателя 6 и сигнал рассогласования с вала синхронного генератора 8. / Sxodnofii/ /С 6/xoffffo/ i/ зёени дi/фqJepef - зоену г/фi4i a/ia(pepenuuffj cf 15 74 : 
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод постоянной частоты вращения вала | 1988 |
|
SU1552151A1 |
| Устройство для регулирования частоты вращения вала | 1986 |
|
SU1317404A2 |
| Гидромеханическая передача | 1975 |
|
SU564479A1 |
| Гидромеханический ходоуменьшительдля зЕМлЕРОйНОй МАшиНы | 1979 |
|
SU819285A1 |
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Инерционная гидромеханическая передача | 1983 |
|
SU1110973A1 |
| Механизм поворота гусеничной машины | 1987 |
|
SU1527071A1 |
| Ходоуменшитель транспортного средства | 1977 |
|
SU673477A1 |
| Устройство для автоматическогопОддЕРжАНия СТАбильНОй чАСТОТыВРАщЕНия ВыВОдНОгО ВАлА гидРОМЕХАНичЕСКОйпЕРЕдАчи | 1978 |
|
SU794282A1 |
| Устройство для автоматического поддержания стабильной частоты вращения синхронного генератора | 1979 |
|
SU855298A1 |
УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА, содержащее трехзвенный дифференциал, первое звено которого связано с валом задающего двигателя, второе звено связано с валом гидромащины, гидравлически соединенной с регулируемой гидромашиной с механизмом управления, ротор которой кинематически связан с третьим звеном трехзвенного дифференциала, которое связано с синхронным генератором и первым центробежным датчиком с каналом управления, отличающееся тем, что, с целью повышения точности устройства, в него введены втьрой центробежный датчик и узел перенастройки второго центробежного датчика, вал второго центробежного датчика кинематически связан с первым звеном трехзвенного дифференциала, исполнительный механизм связан с механизмом управления регулируемой гидромашины, а канал управления первого центробежного датчика соединен с узлом перенастройки второго центробежного дат(Л чика. о: о оо 00 Нагнетание | c/iuS
| Гавриленко Б | |||
| А | |||
| Гидравлический привод | |||
| М., | |||
| «Машиностроение, 1968, с | |||
| ВОДЯНОЙ ЦЕПНОЙ ДВИГАТЕЛЬ | 1923 |
|
SU481A1 |
| Устройство для автоматическогопОддЕРжАНия СТАбильНОй чАСТОТыВРАщЕНия ВыВОдНОгО ВАлА гидРОМЕХАНичЕСКОйпЕРЕдАчи | 1978 |
|
SU794282A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
