1
Изобретение относится к робототехнике .
Цель изобретения - расширение тех нологических возможностей промышленного робота.
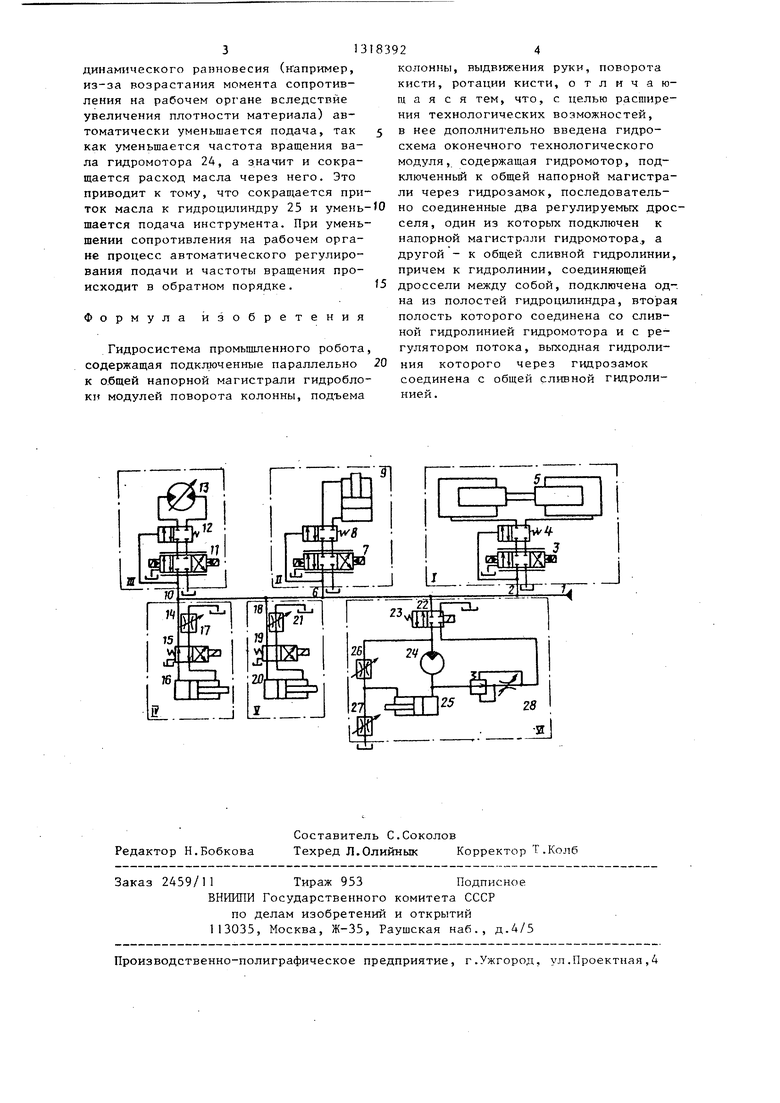
На чертеже представлена схема гид росистемы промьшшенного робота.
На схеме обозначены 1 - модуль поворота колонны; II - модуль подъема колонны; III - модуль выдвижения руки; IV - модуль поворота кисти; V - модуль ротации кисти; VI - оконечный технологический модуль.
Гидросистема содержит напорную магистраль I, от которой отведена гидролиния 2, питающая через гидрораспределитель 3 и гидрозамок 4 гидроцилиндр 5 поворота колонны. Гидролиния 6 питает через гидрораспределитель 7 и гидрозамок 8 гидроцилиндр 9 подъема колонны. Гидролиния 10 питает через гидрораспределитель 11 и гидрозамок 2 гидродвигатель 13 механизма подачи модуля выдвижения руки.
Гидролиния 14 питает через гидрозамок 15 гидроцилиндр 16 поворота кисти. Через регулируемьгй дроссель 17 жидкость идет на слив, Гидролиния 18 питает через гидрозамок 19 гидроцилиндр 20 ротации кисти. Через регулируемый дроссель 21 жидкость идет на слив. Гидравлическая система оконечного технологического модуля имеет гидролинию 22, которая питает через гидрозамок 23 гидромотор 24, обеспечивающий вращательное движение инструмента (непосредственно крепящегося к выходному валу гидромотора 24) и гидроцилиндр 25, обеспечивающий поступательное движение инструмента.
В сливную линию регулируемого дросселя 26 включен регулируемый дроссель 27 для создания подпора давления между регулируемым дросселем 26 и гидроцилиндром 25 подачи.
В сливн-ую ЛИН1-ПО гидромотора 24 включен регулятор 28 потока, характерной особенностью которого является стабилизация расхода масла, протекающего через него, что имеет существенное значение для осуществления режима резания.
Гидросистема работает следующим образом.
Перед началом работ дросселями 26, 27 и регулятором 28 потока устаJO
)5
20
18392-2
навливаются в соответствии с заводской операционной картой технологического процесса значения давлений и расходов в отдельных магистралях 5 технологического модуля. В зависимости от необходимого режима обработки детали гидросопротивление дросселя 26 устанавливают меньшим гидросопротивления гидромотора 24 на величину, необходимую и достаточную для создания на рабочем органе соответствующего момента сопротивления. Величины гидросопротивлений гидромотора 24 и дросселя 26 для различных значений скорости гидромотора и различных параметров настройки дросселя определяются по их характеристикам или в результате экспериментальных проливок.
По заданной программе рука робота выходит в требуемую точку. Для чего включаются модуль I поворота колонны, модуль II подъема колонны и мо- ,, дуль III выдвижения руки. Расширяет рабочие возможности робота и модуль IV поворота кисти, после включения которого появляется возможность обрабатывания отверстий, расположенных под углом к плоскости детали.
Оконечньй технологический модуль, смонтированный на руке робота, устанавливается на некотором расстоянии от обрабатываемой детали и происходит включение его гидросистемы в напор- -5 ную магистраль 1 .
После включения гидросистемы при отсутствии контакта между инструментом и деталью автоматически осуществляется ускоренная подача инструмента в сторону детали, так как действительный с-уммарный момент сопротивления обработке в этом случае равен нулю ,и, следовательно, гидросопротивление гидромотора 24 незначительно. Это приводит к тому, что расход масла через гидромотор 24 много больше , расхода через регулятор 28.
По мере внедрения рабочего органа в обрабатьшаемую поверхность им воспринимается все более увеличивающийся момент сопротивления резанию. При достижении моментом сопротивления определенной величины, при которой гидросопротивление гидромотора 24 соответствует установленному для данного режима гидросопротивлению дросселя 26, наступает период динамического равновесия. При нарушении
30
40
45
50
55
динамического раниовесия (например, из-за возрастания момента сопротивления на рабочем органе вследствие увеличения плотности материала) автоматически уменьшается подача, так как уменьшается частота вращения вала гидромотора 2А, а значит и сокращается расход масла через него. Это приводит к тому, что сокращается приток масла к гидроцилиндру 25 и уменьшается подача инструмента. При уменьшении сопротивления на рабочем органе процесс автоматического регулирования подачи и частоты вращения происходит в обратном порядке.
Формула изобретения
Гидросистема промьщшенного робота содержащая подключенные параллельно к о.бщей напорной магистрали гидробло- кп модулей поворота колонны, подъема
колонны, выдвижения руки, поворота кисти, ротации кисти, отличающаяся тем, что, с целью расширения технологических возможностей, в нее дополнительно введена гидросхема оконечного технологического модуля, содержащая гидромотор, подключенный к общей напорной магистрали через гидрозамок, последовательно соединенные два регулируемых дросселя, один из которых подключен к напорной магистрали гидромотора., а другой - к общей сливной гидролинии причем к гидролинии, соединяющей дроссели между собой, подключена одна из полостей гидроцилиндра, вторая полость которого соединена со сливной гидролинией гидромотора и с регулятором потока, выходная гидролиния которого через гидрозамок соединена с общей сливной гидролинией.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод бурового станка | 1987 |
|
SU1460235A1 |
| Гидропривод бурильной установки | 1991 |
|
SU1788230A1 |
| Устройство управления грузоподъемным краном | 1980 |
|
SU965966A1 |
| АДАПТИВНАЯ МАШИНА ВРАЩАТЕЛЬНОГО БУРЕНИЯ | 2011 |
|
RU2473767C1 |
| СПОСОБ БУРЕНИЯ ПОРОДЫ С ПЕРЕМЕННЫМИ СВОЙСТВАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582691C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2061914C1 |
| Гидропривод вращательно-подающего механизма бурильной машины | 1988 |
|
SU1587186A1 |
| Гидравлический привод автомобильного подъемника | 1991 |
|
SU1789787A1 |
| Привод рабочих органов лесозаготовительной машины | 1980 |
|
SU970020A1 |
Изобретение относится к робототехнике. Целью изобретения является расширение технологических возможностей промьпиленньгх роботов за счет применения в системе оконечного технологического модуля. Это достигается тем, что технологический модуль имеет адаптивную гидросхему, содержащую гидромотор, гидроцилиндр, два регулируемых дросселя, регулятор потока, и которая в зависимости от нагрузки по двум параметрам (вращению и подачи) обеспечивает изменение режима работы вплоть до отвода инструмента назад. 1 ил. 5 (Л со 00 00 со N5
ч
Г/15
Редактор Н.Бобкова
Составитель С.Соколов
Техред Л.Олийнык Корректор Т.Колб
Заказ 2459/11 Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб. , д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Белянин П.Н | |||
| Промышленные роботы и их применение | |||
| - М.: Машиностроение, 1983, с.128, рис.42. |
