Известные механизмы для наблюдения величины перемещенин исполнительного органа машины не обеспечивают достаточной четкости отображения неремещений.
Предлагаемый механизм позволяет повысить четкость отображения перемещений исполнительного органа и обеспечивает согласованное действие защелок соседних дисков. Это достигается тем, что каждый из лимбов механизма связан с ведущей осью непрерывной упругой связью и жестко скреплен с диском, снабженным пазами для фиксирующей его положения запделки- Защелка последующего диска связана с защелкой предыдущего диска.
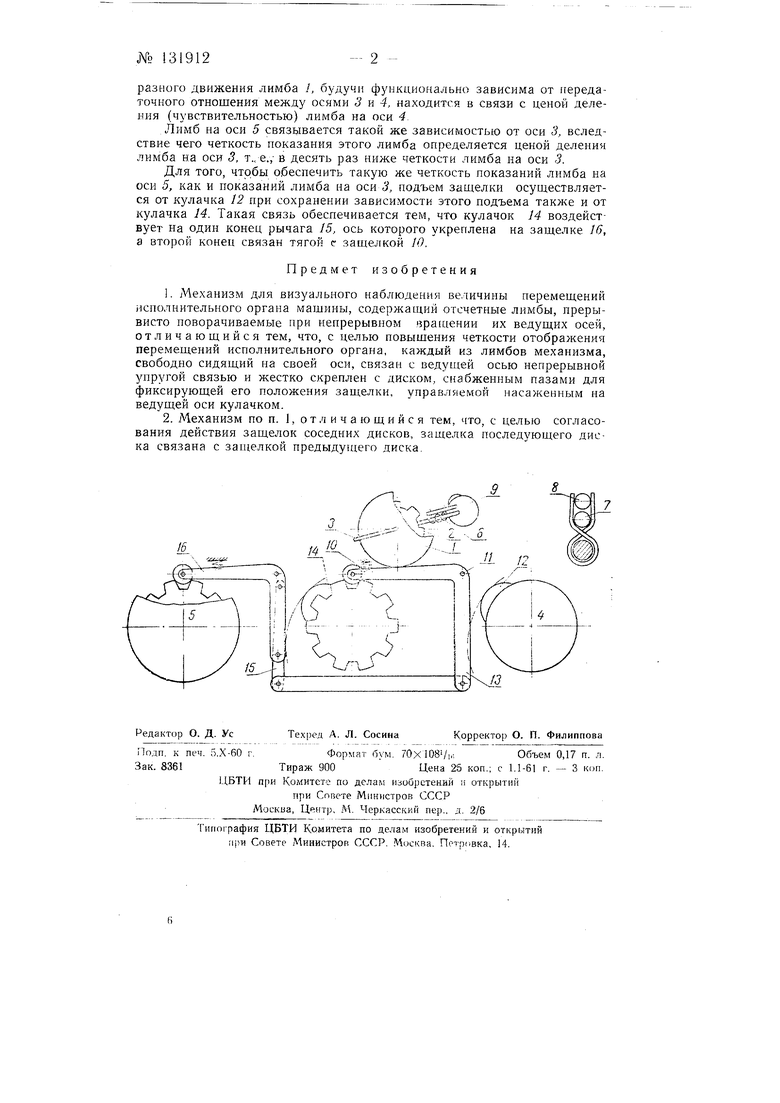
Кинематическая схема механизма дана на рисунке.
Механизм состоит из нескольких элементов, отображающих в принятой системе счисления величину перемещения исполнительного органа машины.
Лимб / скреплен с диском 2 и свободно враи1ается на оси 3, связанной с осями 4 и 5 непрерывной передачей.
Упругая связь лимба / с осью 3 при ее вращении в обоих направлениях осуществляется посредством пружины 6, надетой на ось 3 таким образом, что оба конца ее упираются в штифт 7 диска 2 и ограничиваются штифтом 8 кулачка Я который скреплен с осью 3. Диск 2 снабжен десятью пазами, предназначенными для его фиксирования при помощи за1целки 0, поворачиваемой вокруг ос // кулачком 12, который скреплен с осью 4, вращающейся в десять раз быстрее оси 3.
Такое устройство обеспечивает прерывистое вращение лимба / при непрерывной передаче между осями 3 и 4, причем скачок лимба на следующее положение совершается при каждом нажатии кулачка 12 на рычаг 13. Четкость подъема защелки, а следовательно, и начала скачкооб