синусный генератор 7, цифровые сумматоры 8 и 9, аналоговый сумматор 10, генератор П опорной частоты, блок 12 функционального преобразования, блок 13 выбора каналов, блок ,1А преобразования напряжения в частоту, реверсивный счетчик 15, введены второй сннусно-косинусный генератор 6, аналого-цифровой преобразователь 16, блок 17 управления и обработки, компараторы 18 и 19. Выходные напряжения датчиков 1 и 2 демодулируются | в демодуляторе 3, ЦАП 4 и 5. Выход1
Изобретение относится к автоматик и вычислительной технике и может быт использовано для связи аналоговых источников информации с цифровым вычислительным устройством.
Цель изобретения - повьппение динамической точности преобразователя -. путем цифровой коррекции его частотной характеристики.
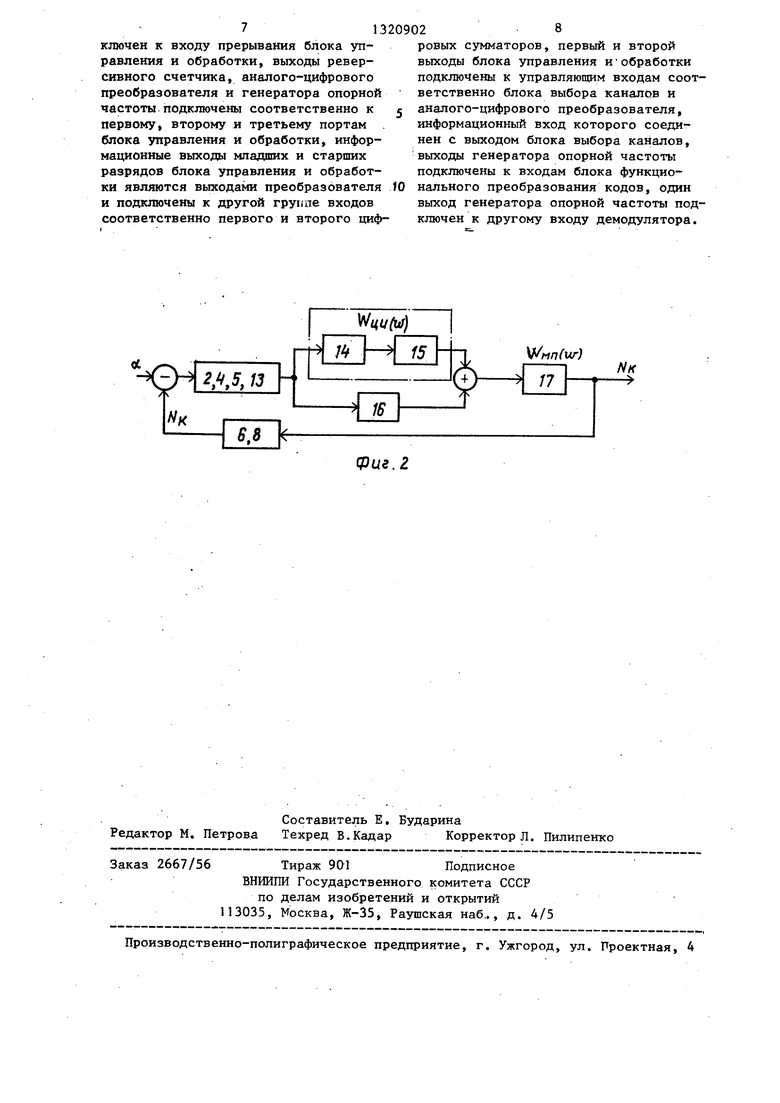
На фиг. 1 представлена блок-схема преобразователя; на фиг. 2 - математическая модель одной из реализаций канала точного отсчета преобразователя.
Преобразователь угла поворота вала в код содержит синусно-косинусный датчик 1 грубого отсчета (СКДГО), синусно-косинусный датчик 2 точного отсчета (СКДТО), демодулятор 3, циф- роаналоговые преобразователи (ЦАП) 4 и 5, синусно-косинусные генераторы 6 и 7, цифровые сумматоры 8 и 9, аналоговьй сумматор 10, генератор 11 опорной частоты, блок 12 функциональ- ного преобразователя кодов, блок 13 выбора каналов, блок 14 преобразования напряжения в частоту (ПНЧ), реверсивный счетчик 15, аналого-цифровой преобразователь (ЛЦП) 16, блок 17 управления и обработки, компараторы 18 и 19.
Синусно-косинусные генераторы 6 и 7 представляют собой функциональный преобразователь кода .в коды си- нуса и косинуса, выходы которого подключены к цифровым входам соответствующих ЦАП, на выходе ЦАП установные сигналы рассогласования между углом и кодом с выходов демодулятора 3 и аналогового сумматора 10 через блок 13 поступают на вход цифрового интегратора, образованного блоками 14, 15, и вход АЦП. Полученные коды обрабатьгоаются блоком 17 для обеспечения заданных динамических характеристик и по цепи обратной связи выходной код блока 17 воздействует на напряжение возбуждения датчиков 1 и 2, компенсируя фазовый угол поворота датчика. 2 ил.
лены усилители мощности. Генератор 11 опорной частоты представляет собой последовательно соединенные генератор импульсов и делитель частоты. Блок 17 управления и обработки, который может быть выполнен, например, на микро-ЭВМ 1АРХ-186, содержит арифметико-логический блок, контроллеры доступа к памяти и прерываний, счет- чик микрокоманд, генератор синхросигналов, буферные регистры.
Преобразователь представляет собой импульсную следящую систему, которая в зависимости от углового рассогласования образуется блоками 9,
7,1,3, 13, 14, 15, 16, 17, 9 или
8,6, 2, 4, 5, 10, 13, 14, 15, 16, 17, 8.
Преобразователь работает следующим образом.
Генератор 11 вырабатывает цифровой эквивалент аргумента cot, который блоком 12 функционального преобразования кода преобразуется в код функции cos ot и sin cot, а цифровыми сумматорами 8 и 9 и синусно-косинусными генераторами 6 и 7 - в аналоговые напряжения возбуждения датчиков 2 и 1 UQsin(cot-N), UgCosCot-Njc) и UpSin((ot-N), UgCos(cot-N) соответственно, где К - коэффициент электрической редукции. На цифровой сумматор 8 поступает п младших разрядов выходного кода и, а на цифровой сумматор 9 -т старших разрядов кода N, число разрядов которого Р п + m - 1.
Р П
При этом К 2 , Цифровой сумматор
совместно с синусно-косинусным генератором выполняют функцию цифроана- логового преобразования цифрового
кода N.. или К в аналоговые значения ts
фазы напряжения возбуждения соответствующего датчика 2 и 1 угла. .
Выходные фазомодулированные напряжения датчика 2 точного отсчета и sin(cot-Nn+oi-) и U cosCwt-Njj+oi) перемножаются цифроаналоговыми преобразователями 4 и 5 на коды взаимно ортогональных функций coswt и sin cot. После вычитания в аналоговом сумматоре 10 на его выходе образуется напряжение
У,, .(o6- У,).
Напряжение с вторичной обмотки
t5 ко. Выходное напряжение аналогового сумматора 10 отлично от нуля и на вы ходе компаратора 18 (сдвоенный компа ратор с окном) появляется сигнал, разрешающий по входу стробирования
датчика 1 грубого отсчета U,cos(ut - 20 работу компаратора 19, который фор N + об) поступает на вход демоду.)1ято- ра 3, который в качестве опорного использует напряжение старшего разряда генератора 11. Выходное напряжение демодулятора 3 после фильтрации с помощью входящего в его состав фильтра нижних частот имеет вид
25
(-N+o6). Поскольку канал грубого отсчёта необходим для исключения Неоднозначности отсчетов, то использован только лишь один демодулятор 3 в режиме релейного синхронного детектирования.
Выходные напряжения каналов грубо30
мирует импульс в момент перехода через нуль выходного напряжения датчика 2 угла грубого отсчета. Под воздействием этого импульса блок 17 осуществляет прерьгоание выполнения основного режима работы и выполняет режим согласования отсчетов. В выходной регистр блока 17 заносится код генератора 11, соответствующий моменту прихода импульса на прерывание, реализуя тем самым метод бегущей стробирующей метки. Этот код приближенно соответствует угловому положению датчика 1, поэтому
го и точного отсчетов через блок 13 35 следящая система грубого отсчета
выбора каналов поступают на вход бло- изменяет код до тех пор, когда выка 14 преобразования напряжения в
частоту ПНЧ для преобразования их в
последовательный код с последующим
суммированием в реверсивном счетчике
15. Блок 14 совместно с реверсивным
40
ходное напряжение демодулятора 3 уменьшается до нуля, т.е. Uabix э Ujsin(K-oi) О, откуда N ; tA с точностью до величины младшего разряда грубого отсчета, т.е. N об + + NK/2.
счетчиком 15 производит цифровое интегрирование сигнала рассогласования следящей системы. Одновременно этот
ходное напряжение демодулятора 3 уменьшается до нуля, т.е. Uabix э Ujsin(K-oi) О, откуда N ; tA с точностью до величины младшего раз ряда грубого отсчета, т.е. N об + + NK/2.
Как только Ugbix-v- О (код АПП 16
сигнал подвергается цифровому преоб- - также уменьшился до нуля), блок 17
разованию в аналого-цифровом преобразователе 16. Выходные коды реверсивного счетчика 15 и АЦП 16 поступают на соответствующие входы блока 17, который осуществляет выбор канала отсчета (согласование отсчетов цифровую обработку сигналов пропорционального (через АЦП) и интегрального (через ПНЧ и реверсивный счетчик) управления следящей системой, цифровую коррекцию ее частотной характеристики, выработку и фиксацию выходного кода N, который поступает
209024
в цифровые сумматоры 8 и 9. Тем самым замыкается обратная связь в соответствующей следящей системе.
В зависимости от величины углово5 го рассогласования следящая система образуется блоками 9, 7, |, 3, 13, 14, 15, 16, 17, 9 при /N-oi/i 360°/2 либо блоками 8, 6, 2, 4, 5, 10, 13, 14, 15, 16, 17, 8 при / N-06/ 360°/2 .
W При включении преобразователя по команде блока 17 блок 13 выбора каналов включает в следящую систему канал грубого отсчета, так как угловое рассогласование достаточно велиt5 ко. Выходное напряжение аналогового сумматора 10 отлично от нуля и на выходе компаратора 18 (сдвоенный компаратор с окном) появляется сигнал, разрешающий по входу стробирования
работу компаратора 19, который фор
мирует импульс в момент перехода через нуль выходного напряжения датчика 2 угла грубого отсчета. Под воздействием этого импульса блок 17 осуществляет прерьгоание выполнения основного режима работы и выполняет режим согласования отсчетов. В выходной регистр блока 17 заносится код генератора 11, соответствующий моменту прихода импульса на прерывание, реализуя тем самым метод бегущей стробирующей метки. Этот код приближенно соответствует угловому положению датчика 1, поэтому
ходное напряжение демодулятора 3 уменьшается до нуля, т.е. Uabix э Ujsin(K-oi) О, откуда N ; tA с точностью до величины младшего разряда грубого отсчета, т.е. N об + + NK/2.
Как только Ugbix-v- О (код АПП 16
0
5
с помощью блока 13 выбора каналов включает в следящую систему канал точного отсчета и приступает к выполнению основного режима работы, который предусматривает на начальном этапе оптимальный по быстродействию переходный процесс из точки N cJ- + в точку W a j с точностью до величины младшего разряда точного отсчета.
При этом напряжение рассогласова- ния на выходе сумматора Ю равно нулю, компаратор IS запирает по входу
стробирования компаратор 19 и,импульс на прерывание не вырабатывается.
В зависимости от требований к преобразователю по быстродействию и ве-г личине динамической погрешности блок 17 желаемый вид частотной характеристики следящей системы канала точного отсчета. На фиг. 2 изображена математическая модель одной
из реализаций импульсной следящей системы На этой схеме W,(w)
К,
(1+Т,У)(1-ТаУ)
- передаточная
М W функция, реализуемая блоком 17;
I -Т W
W...(w) К, - передаточная
ЦП {- -tf
функция цифрового интегратора; ПФК - преобразователь код-фаза. Совокупность, блоков 2, 4, 5, 10 (см. фиг. эквивалентна блоку с выходным напряжением, изменяющимся по закону 10 sin(()i,-N)t), на входе которого действует угловая ошибка (об-N). Следовательно, его передаточный коэффициент К 10/1Г. Окончательно передаточную функцию импульсной следящей системы можно записать в виде
„(,,, о) К (.l)(l-T.v)
V
Таким образом, при реализации изобретения с цифровым интегратором в качестве корректирующего устройства, производящего вычисления в соответствии с алгоритмом
N(n) а,М(п-1) + а.Н(-п--2} + + Ъ,Ш(п-1) + b,jN(n-2)
где N(n), N(n-l), N(n-2) - значения выходного кода, вычисленные в соответствующих тактах;
.N(n-l), W(n-2) - суммарный код цифрового интегратора и АЦП, измеренный в соответствующих тактах, преобразователь приобретает свойства астатической следящей системы третьего порядка, в которой отсутствуют динамические ошибки по скорости и .ускорению при изменении входного уг ла об с постоянным ускорением.
Для устранения инструментальной погрешности блок управления и обра
г5 W
15
20
) 30
эс 40
50
45
55
ботки предусматривает в основном режиме коррекцию выходного кода с помощью поправок, записанных в постоянную память указанного блока на этапе метрологической аттестации преобразователя.
Формула изобретения
Преобразователь угла поворота вала в код, содержаш 1й синусно-косинус- ный датчик грубого отсчета, выход которого подключен к одному входу демодулятора, выход демодулятора подключен к одному информационному входу блока выбора каналов, синусно-коси- нусный датчик точного отсчета, входы которого соединены с выходами перво г- го синусно-косинусного генератора, а первый и второй выходы подключены к анашоговым входам первого и второго цифроаналоговых преобразователей , соответственно, цифровые входы первого и второго цифроаналоговых преобразователей соединены с соответствующими выходами блока функционального преобразования кодов, а выходы подключены к входам аналогового сумматора, выход которого подключен к другому информационному входу блока выбора каналов, выход блока выбора каналов подключен к входу блока преобразования напряжения в частоту, выходы которого подключены к входам реверсивного счетчика, генератор опорной частоты, выходы которого подключены к одним группам входов первого и второго цифровых сумматоров, отличаю щ.и и с я тем, что, с целью повьшения динамической точности преобразователя, в него введены второй синусно-косинусный генератор, первый и второй компараторы, аналого-цифровой преобразователь и блок управления и обработки, выходы первого и .второго цифровых сумматоров подключены к входам соответственно первого и второго синусно-косинусного генераторов, выходы второго синусно-косинусного генератора подключены к входам синусно-косинусного датчика грубого отсчета, выход аналогового сумматора через первый компаратор подключен к стро- бирующему входу второго компаратора, информационный вход которого соединен с выходом синусно-косинусного датчика грубого отсчета, а выход подключей к входу прерывания блока управления и обработки, выходы реверсивного счетчика, аналого-цифрового преобразователя и генератора опорной частоты подключены соответственно к первому, второму и третьему портам . блока управления и обработки, информационные выходы мпадших и старших разрядов блока управления и обработки являются выходами преобразователя и подключены к другой группе входов соответственно первого и второго цифСоставитель Е, Бударина Редактор М. Петрова Техред В.Кадар Корректор Л. Пилипенко
2667/56
Тираж 9Q1Подписное
ВНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
ровых сумматоров, первый и второй выходы блока управления иобработки подключены к управляющим входам соответственно блока выбора каналов и аналого-цифрового преобразователя, информационный вход которого соединен с выходом блока выбора каналов, выходы генератора опорной частоты подключены к входам блока функционального преобразования кодов, один выход генератора опорной частоты подключен к другому входу демодулятора.
цц(и)
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь кода в угол поворота вала | 1985 |
|
SU1312741A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1088045A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU645190A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| Многоканальный преобразователь перемещения в код | 1987 |
|
SU1495994A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| Преобразователь перемещения в код | 1988 |
|
SU1531221A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2012 |
|
RU2517055C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для связи аналоговых источников информации с цифровым вычислительным устройством. С целью повышения динамической точности путем коррекции частотной характеристики в преобразователь, содержащий синусно-косинусный датчик 1 грубого отсчета, синусно-косинусньй датчик 2 точного отсчета, демодулятор 3, цифроаналоговые преобразователи (ЦАП) 4 и 5, первый синусно-косл ьо о со о to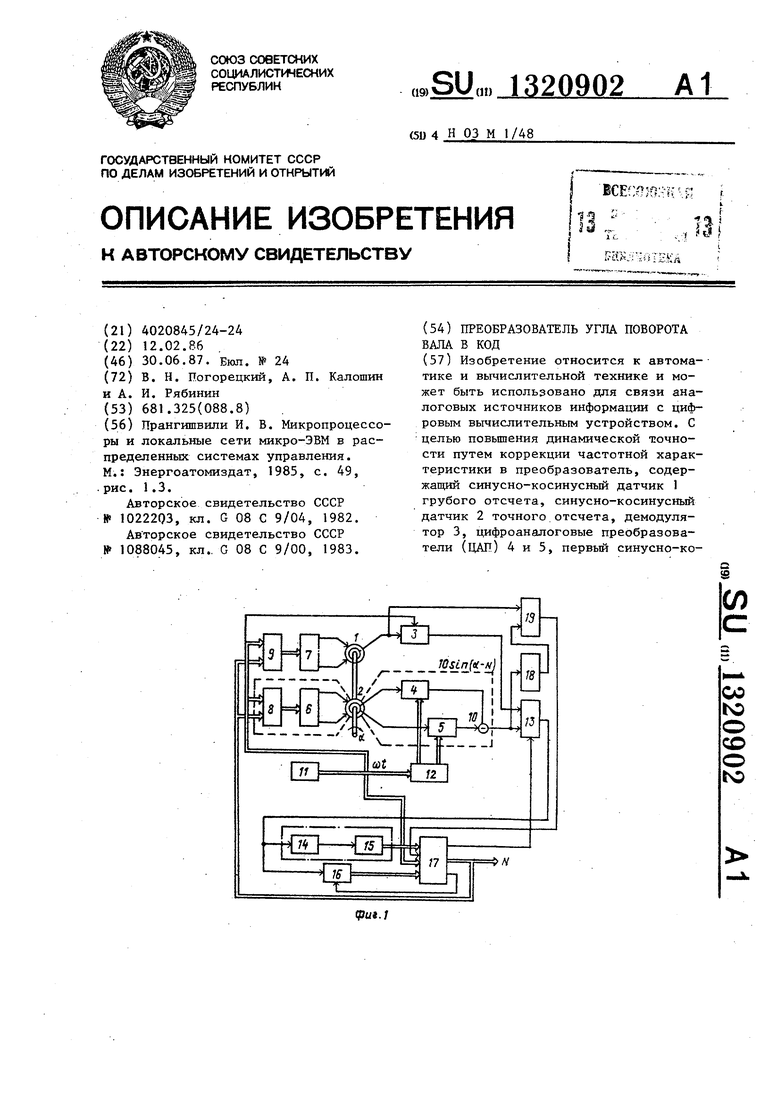
| Прангишвили И | |||
| В | |||
| Микропроцессоры и локальные сети микро-ЭВМ в распределенных системах управления | |||
| М.: Энергоатомиздат, 1985, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Устройство для определения на расстоянии направления ветра | 1928 |
|
SU10222A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1088045A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
