Изобретение относится к оборудованию для приема и вымотки гибких длинномерных изделий, например, в кабельной промышленности, и может быть использовано для приема и вымотки голых и изолированных жил кабелей, стренг и проводов.
На фиг. 1 показано предлагаемое устрой- k.CTBo; на фиг. 2 - контейнер с механизмом перемещения направляющего элемента, разрез; на фиг. 3 - каретка с тяговым приспособлением и дополнительным приводом.
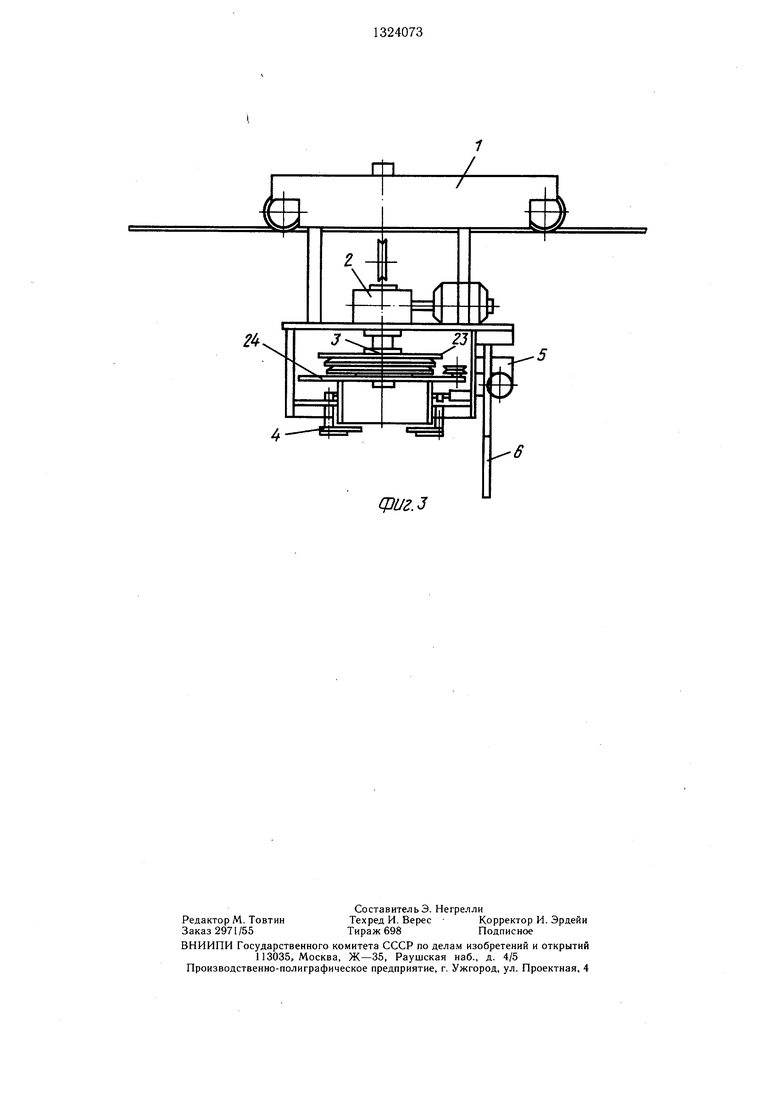
Устройство содержит каретку 1 с приводом 2, тяговым приспособлением 3, накопителем 4 и дополнительным приводом 5 с ведомым звеном 6, выполненным в виде зубчатой рейки, и по меньшей мере один приемный контейнер 7, выполненный в виде полого цилиндра 8 с расположенным в нем полым керном 9 с направляющим элементом 10, укрепленным на штанге 11. К штанге прикреплен конец 12 тросса 13, второй конец 14 указанного тросса укреплен на щтоке 15, установленном в зоне контейнера на эстакаде 16 и взаимодействующим с дополнительным приводом 5. Тросе 13 огибает поворотные ролики 17-20 и подвижный ролик 21, установленный на штоке 15, кинематически связанном в положении приема с дополнительным приводом 5. Шток 15 соединен с возвратной пружиной 22. Тяговое приспособление содержит тяговую шайбу 23, диск 24 с направляющими роликами. На каждом контейнере 7 установлен датчик заполнения (не показан).
Устройство работает следующим образом.
По сигналу от пустого контейнера 7 каретка 1 перемещается по эстакаде 16 и устанавливается над контейнером, в этот момент включается дополнительный привод 5, ведомое звено которого 6 сообщает поступательное движение щтоку 15, последний, опускаясь, перемещает ролик 20, который в свою очередь действует на тросе 13. При этом конец 12 тросса, перемещаясь вверх, тянет за собой штангу 11 и укреп0
ленный на ней направляющий элемент 10. После этого начинается укладка витков, сформированных тяговой шайбой 23 и направляющим элементом 10, в контейнер 7. После заполнения контейнера по сигналу датчика заполнения вновь включается дополнительный привод 5, отводя ведомое звено 6 от щтока 15. Последний под действием пружины возврата 22 возвращается в исходное положение, а направляющий элемент 10 под действием собственного веса опускается, каретка 1 перемещается к свободному контейнеру и цикл работы в режиме приема повторяется. Наполненный контейнер готов для работы в режиме вымотки, 5 так как направляющий элемент 10 опущен и не создает дополнительного трения при выматывании изделия.
Таким образом предлагаемое устройство обеспечивает автоматический переход от приема изделия к вымотке при поддержании одинакового диаметра всех витков и упорядоченной их укладки в контейнере, что исключает закручивание и обрывность изделия при вымотке.
0
25
Формула изобретения
Устройство для непрерывного приема и вымотки гибких длинномерных изделий, содержащее горизонтально перемещающуюся каретку с приводом и тяговым приспособлением, по меньшей мере один приемный контейнер, выполненный в виде полого цилиндра с расположенным в нем патым керном с направляющим элементом, отличающееся тем, что, с целью обеспечения автоматизации и повышения качества путем исключения закручивания изделия, снабжено дополнительным приводом, установленным на каретке, и механизмом перемещения направляющего элемента, установленным в зоне контейнера, при этом направляющий
элемент выполнен подвижным вдоль оси керна, а механизм перемещения направляющего элемента имеет кинематическую связь с дополнительным приводом.
фиг.1
4f(риг.з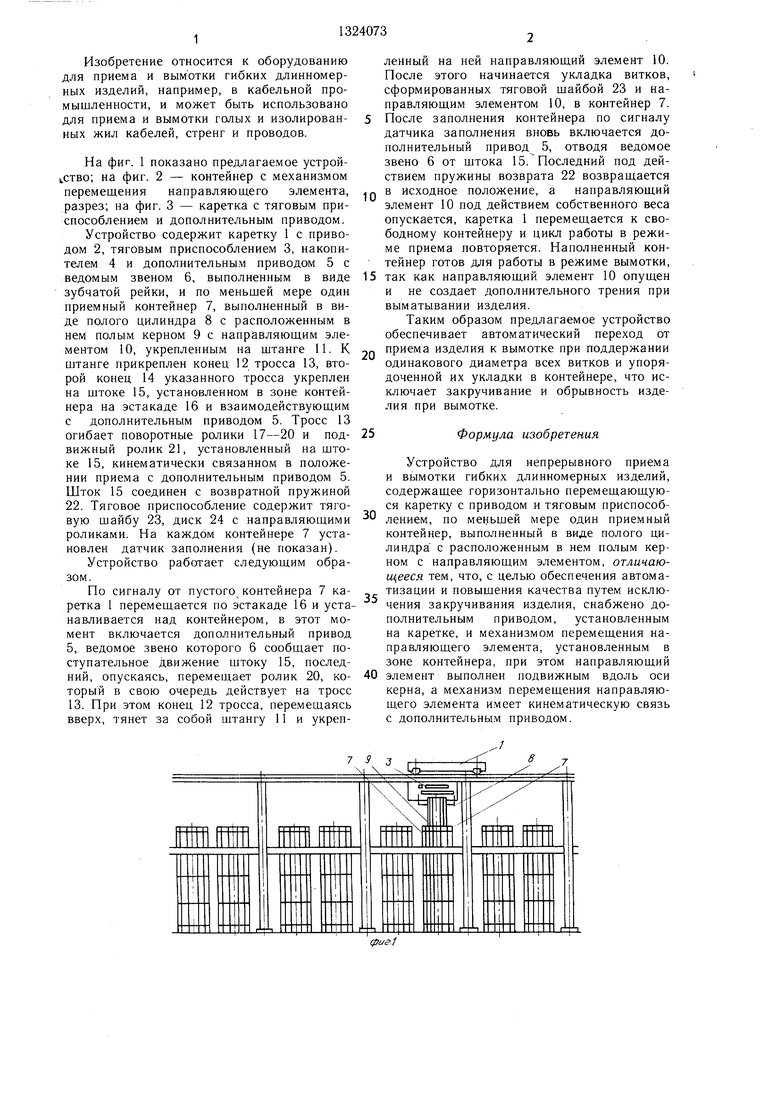
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВАЯ УСТАНОВКА | 2012 |
|
RU2522472C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ, ЗАГРУЗКИ И РАЗГРУЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ В ГРУЗОВУЮ КАБИНУ САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2248308C2 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
| Устройство для погрузки и разгрузки контейнеров и поддонов из транспортных средств | 1985 |
|
SU1281491A1 |
| СТЕНД ЦЕПНОГО ПРИВОДА СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2021 |
|
RU2783050C1 |
| УСТРОЙСТВО ДЛЯ ХИМИКО-ТЕРМИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ | 2002 |
|
RU2221897C1 |
| Установка для загрузки и разгрузки стержневых изделий из транспортных средств | 1977 |
|
SU709482A1 |
| СПОСОБ БЕСКРАНОВОЙ ПЕРЕГРУЗКИ И ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ И ИЗДЕЛИЙ БОЛЬШОЙ МАССЫ С ПЛОСКИМ ОСНОВАНИЕМ В САМОЛЕТ И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348569C1 |
| СПОСОБ ОТБОРА ПРОБ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2812193C1 |
| Грузозахватное устройство для автоматической загрузки длинномерных деталей | 1974 |
|
SU549398A1 |
Изобретение относится к электротехнике, в частности к кабельной технике. Цель изобретения - обеспечения автоматизации и повышение качества путем исключения закручивания изделия. По сигналу от пустого контейнера каретка перемешается по эстакаде 16 и устанавливается над контейнером. В этот момент включается дополнительный- привод, ведомое звено 6 которого сообшает поступательное движение штоку 15. Последний, опускаясь, перемешает ролик 20, который в свою очередь действует на трос 13. После заполнения контейнера по сигналу датчика заполнения вновь включается дополнительный привод, отводя ведомое звено 6 от штока 15. Затем цикл работы в режиме приема повторяется. 3 ил. ю (Л GO Ю О со S,3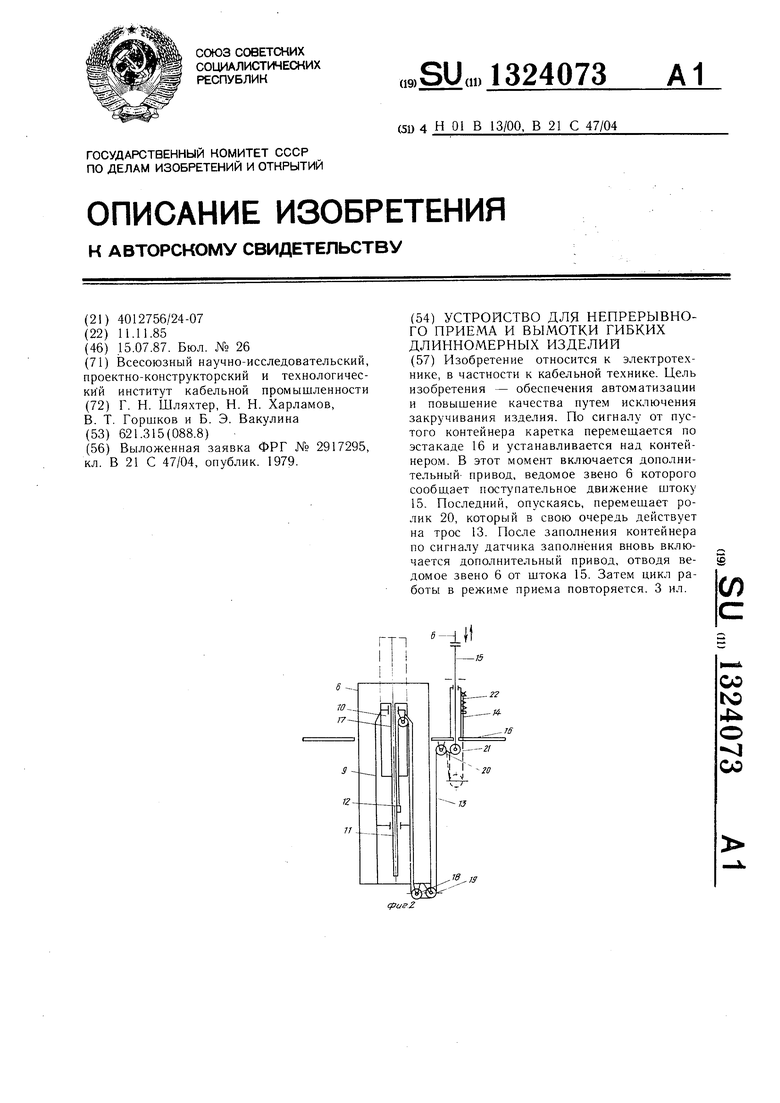
| Выложенная заявка ФРГ № 2917295, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
