Изобретение относится к строительству, а именно к устройствам для контроля прочности дорожных одежд прн динамическом нагружении по величине упругого прогиба.
Целью изобретения является повышение точности контроля.
На фиг. 1 представлена обпдая схема устройства для контроля прочности дорожных одежд; на фиг. 2 -- узел I на фиг. 1 (конструкция измерителя вертикальных перемещений); на фиг. 3 - измерительное колесо при обкатывании им микропрофиля дороги Z (X); на фиг. 4 - структурная схе.ма синхронного фильтра; на фиг. 5 - временные диаграммы работы синхронного фильтра.
Устройство содержит транспортируемый автомобилем-тягачом прицеп 1 с установленным на нем вибратор(.м 2, обеспечивающим периодическое нагружение на спаренные колеса 3, виброизолированную тележку 4 с измерителем вертикальных перемещений, выполненным в виде подпружиненного относительно виброизолированной тележки двуплечего рычага 5, на свободном конце KOTOpoi o устанонле.чы датчик (i виброскорости и измерительное Ko.ieco 7 с закрен.ленным на нем датчиком 8 угловых нере.мещений. При этом измерительное колесо 7 выполнено из соединенных шарнирно планок 9 с роликами 10 в местах нх соединения, охваченными бесконечным гибким ободом 1 1 и дополнительных вертикальных планок, центральная планка 12 соединяет горизонтальные планки 9 между верхними и нижними роликами 10, а крайние планки 13 верхние и нижние ролики 10, прнчем одна из крайних планок 13 соединена с ползунком 14 датчика 8 угловых иере.мещений, жестко установленного на центральной планке 12. Двуплечий рычаг 5 11 арнирно соеди}1ен с виброизолнрованной тележкой 4, связанной с нрицепо.м 1 посредством вертикальных штанг 15.
Кроме того, устройство содержит датчик 16 скорости, выполненный в виде кату1н- ки нндукти ности, неподвижно закрепленной на вилке одного из колес тележки 4 и нтырей 17, размещенных по окружности этого колеса, умножитель 18, схему 19 ко.мпен- сацни, интегратор 20, синхронный фильтр 21, формирователь 22 синхроимпульсов, регистратор 23, счетчик 24 импульсов и измеритель 25 расстояния, при этом синхронный фнльтр 21 выполнен в виде распределителя 2() импу. 11)Сов, б. кжа 27 электронных ключей, блока 28 памяти и буферного усилителя 29.
Усгр() работает следующим образом.
Т1 )анс1;о)тируемый автомобилем-тягачом ниб11атор 2, установленный на прицепе 1, п| )оиз()диг нагружение дорожной одежды п .фиодической нагрузкой через спаренные к).нч-а 3. Совместное движение прицепа 1 с виб|11)изолир()ванной тележкой 4, из- мершель вертикальных неремещений, обеспечивается вертикальными штангами 15. Из меритель вертикальных неремеп1ений, состоя
5
0
5
0
5
0
5
0
5
щий из измерительного колеса 7 с датчика 8 и 6 угловых перемещений и виброскорости, установленного на свободном конце
двуплечего рычага 5, размещен в зоне приложения вибрационной нагрузки. Принцип действия устройства заключается в выделении сигнала прогиба дорожной одежды из одновременно воспринимаемых непрерывно движущимся измерителем вертикальных перемещений сигналов прогиба и микропрофиля дорожной одежды. С этой целью в устройстве применяют два датчика 6 и 8-дат- чик 6 виброскорости и датчик 8 угловых перемещений, причем первый предназначен для измерения суммарного сигнала, характеризующего величину прогиба и величину микропрофиля, второй служит для измерения только величины микропрофиля дорожной одежды. При движении измерителя вертикальных перемещений происходит перемещение резинового обода 1 1 вокруг вращающихся роликов К), при этом измерительное колесо 7 постоянно опирается на дорожное покрытие нижними роликами 10 посредством бесконечного обода 11. В результате перемещения измерителя датчик 6 виброскорости воснринимает и преобразует абсолютные перемещения измерительного колеса 7, представляющие сумму вертикальных перемещений, вызванных нагружением вибратора 2 и перемещений, связанных с обкатыванием гибким ободом 11 микронрофиля ДО- )) в э.1ек1рическпй сигна., пропорциональный скорости изменения суммы виброперемещений. В то же время при движении измерительного колеса 7, а именно нижних роликов 10 и обода 1 1 по неровностям происходит изменение угла между касательной точек оннрания нижних роликов 10 на дорожную одежду и центральной планкой 12. Угловые перемещения нижних роликов 10 восприни.мает датчик 8 перемещений, благодаря тому, что корпус датчика 8 жестко установлен на центральной планке 12, а его ползунок 14 механически связан с нижними роликами 10 посредством одной из крайних вертикальных планок 13 измерительного колеса 7. При движении измерителя по неровностям ползунок 14 начинает перемещаться. Эти перемещения приводят к изменению величины выходного сигнала датчика 8 угловых перемещечшй, который изменяется в зависимости от величины разности абсолютных перемещений нижних роликов 10, что в свою очередь пропорциональна производной микропрофиля по пространственной координате. При этом датчик 8 угловых перемещений не реагирует на перемещения дорожной одежды, создаваемые вибратором 2, так как вертикальные переме- цения не приводят к изменению положения ползунка 14 из-за того, что оба нижних ролика 10 испытывают равные вертикаль ные перемещения и их положение относительно центра площадки нагруження симметрично.
Для обеспечения высокой точности компенсации микропрофиля в суммарном сигнале, содержащем сумму прогиба и микропрофиля, в устройстве используется датчик скорости импульсного типа, частота выходного сигнала которого линейно связана с угловой скоростью его вращения. При движении устройства 17 из ферромагнитного материала, размещенные по окружности одного из колес виброизолированной тележки 4, проходя в зазоре неподвижной катушки 16, установленной на вилке колеса, модулируют величину ее индуктивности. Датчик скорости выдает на один из входов умножителя 18 дискретную последовательность импульсов с постоянной а.мплитудой и длительностью и частотой следования, пропорциональной скорости движения. На гой вход умножителя 18 поступает ana.ioio- вый сигнал с выхода датчика 8 угловых перемещений, амплитуда которого пронорцио- на.1ьна производной мик)()профи. 1Я ;1орож- ной одежды по пространственной координате. Умножитель 18 вьнкхпиен в виде (})ильт- ра нижних частот и к. 1юча, электрически управ; яемсмо частогно-моду. шронаниым сигналом, поступающим с выхода дискретного датчика скорсд ти, при том к;1юч пропускает сигнал на фильтр нижних частот только в момент действия имиульсо с выхода датчика скорости. Так как длите.тьность и.мпульсов постоянна, а частота следования пропорциона.1ьна скорости движения устройства, на выходе образуется импульсная пос.1едовател1)Ность по ширине (скорость) и амплитуде (разность перемен;ений). Таким образом, в )езультате операции умножения происходит преобразование сигнала, пропорциона.чьно1Ч) производной микрслфо- филя но пространственной координате в сигнал, пропорциона;1ьный производной микропрофиля во времени. Сигнал с выхода умножителя 13 псхчается на один из входов схемы 19 ко.мпенсации, на другой выход которого И(к ту11ает сиг нал, содержащий сумму скоростей изменения прогиба и микропрофиля. Д:гя реа. операции вычитания (компенсации) сигнал с датчика С) виброскорости подается в 11ротиво||)азе но OTHonie- нию к си1 на,:|у, постуиаюпк му с умножи- геля 18. С, выхода схем1 1 19 комненсании снимается си1на.1, 11ропо 1циональный скорс.)- сти измс нения нрошба дорожной одежды.
Принцип действия усгройства дополните.чьно пояснен г помощью фиг. 3, где схематически изображено измерительнск колесо 7, necyniee датчик 8 угловых перемешений и датчик () виброскорости при обкатьзжании им ммк|)онр(.)филя дс.)роги z:(x), при колесо 7 одновременно испытывает вертикальные не)е.меи1ения поверхности дороги W(t) (фи1-. 3, пунктиром), вызванные действием Г1ериодической нагрузки и перемеп1ении за счет обкат1)П1апия колесом 7 .микропрофиля 7. (х). Датчик Г) виброскорости воспринимает
обе ути составляющие перемещения, преобразуя их в сигнал, пронорциональный скорости изменения вибропеременцмшй, который определяется выражением
5л М Д2
di
S(t) W (t
11 -dTДатчик 8 угловых перемеп1ений (фиг. 3) реагирует только на с()ставляюп1ук) микропрофиля ф(х), описываемую выражением
/ 1 ()д.
Таким образом на его выходе образуется сигнал, нропорциональный производной микропрофиля но пространственной координате. котг)рый пос-т п,-и-т на о/щн ич ii.);i(u; ()жпте;1я 18. На другой вход кото|пио подаегся сигна,, 11р((.1Нальный скорч
, V
С1И .шижепия V (t) ---- нроя (ведение- ruiU I
на.101 скорости V(i) и выходного cMi iia. ia ij ч) датчика 8 гл(||)|.|х персАимиений. об |i;i i юпичч я на пыхсче х мн.ж; IIMH 18, K;ii
j го liiriHo И1 tbiip iv.ii.i itlu)i) j iji -dx at От
нв/пн тся СИ на. юм. nponnp,iiU)Ha. ibHt i i ii(io- и 15(д1)й микропрофиля ПО вре.мепи. Ро- П льтируюп1ИЙ сигнал R(t) на выходе схемы И) компенсации соде|1/ки1 то.1ько искомую сое гаиляюшую нро1иба кимасно выраже
R(t) S (iW
(it
+ (И
(х)|.
. (И
0
Сигна.1, 11ропо|1циона:11.ньп 1 cKopociH и.- менения прогиба дорожной одежды, посту n;iei на вход ингеграгора 2(1, на выходе которого по.тучается сигна.I, пропорциопаль- ni,iii величине прогиба. Этот си1пал 11Н({)ормации о прогибе содержит также ос та- T()4fibie шумы, которые могут существенно снижат, точность измерений. Роль ( г ногч.) шума играет остаточный си на.1 от действия МИКрОН1)О(|)И. 1Я дорожной ОДеЖДЬГ /1.1Я
ок()ичате,;11,ной компенсации осгаточных шумов нри.менен синхронны фи,11,г|1 21, кого)1,1Й является ОПТИМИ. СГ)011СТВОМ, в
максимальрюй спепени испольи ннцим и.(вест- 0 НЫ1 часготные и i{)au)Bi)U |)а(личия между по.чезным сигналом и шумами (фиг. 4).
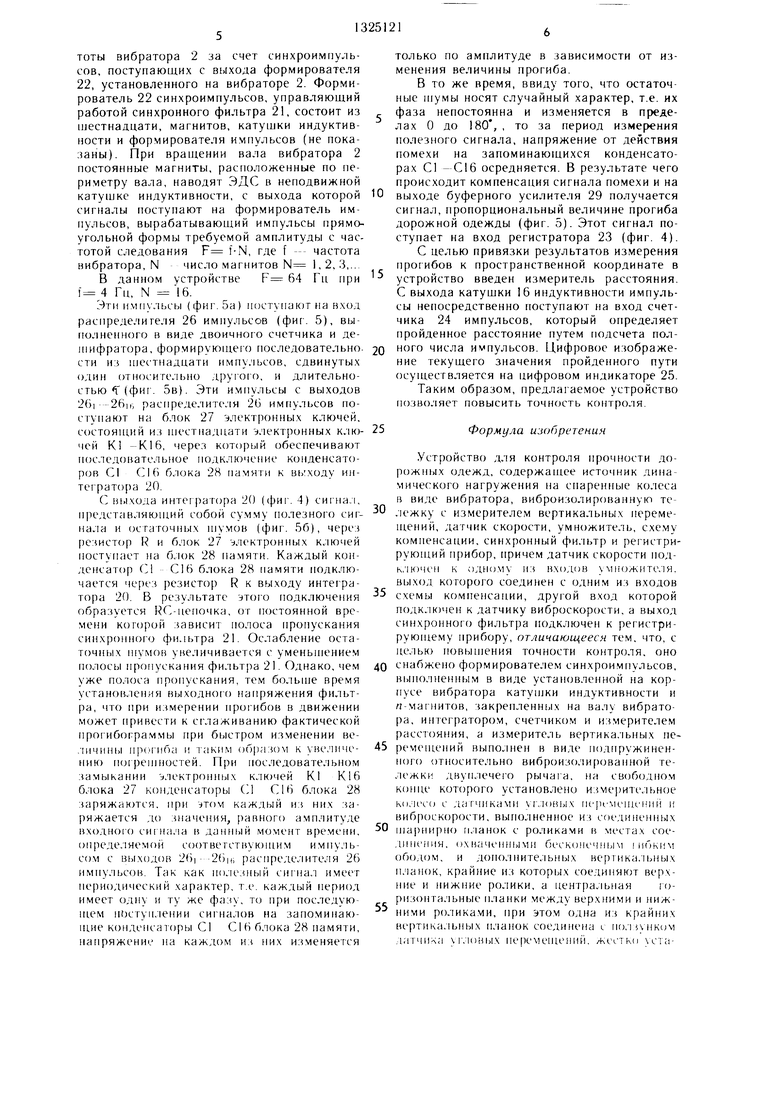
Так как по,-1езныи ciiriia.i нши 11е|411)ди- ческий ха)актер, а сгггна.г помехи с. гучай- Hbiif, синхрогцгый 1|)гг,1Г)Гр 21, насгроенньгй на частоту нагружения. пропускает по.гезный 5 сигнал, а сигнал, характерггзующий микро- 11ро(})и,1Ь, 11одав. 1яет. При том полоса пропускания синхронною фи,1ьтра 21 может менятгд Я в .(ависимости от и: мег1ен(гя частоты вибратора 2 за счет синхроимпульсов, поступающих с выхода формирователя 22, установленного на вибраторе 2. Формирователь 22 синхроимпульсов, управляющий работой синхронного фильтра 21, состоит из иестнадцати, магнитов, катушки индуктивности и формирователя импульсов (не показаны). При вращении вала вибратора 2 постоянные магниты, расположенные по периметру вала, наводят ЗДС в неподвижной кату1ике индуктивности, с выхода которой сигналы поступают на формирователь импульсов, вырабатывающий импульсы прямоугольной формы требуемой амплитуды с частотой следования F I-N, где f -- частота вибратора, N число магнитов N 1,2,3,..
В данном устройстве F 64 Гц fipH f 4 Гц, N 16.
Эти импульсы (фиг. 5а) постуггают на вход распределителя 26 импульсов (фиг. 5), выполненного в виде двоичного счетчика и дешифратора, формирующего последовательно, сти из щес тнадцати импульсов, сдвинутых один ()тносите. 1ьно дру| О1 о, и длительностью Т (фиг . 5в). Эти импульсы с выходов 26| -26iii распределителя 26 импульсов поступают на блок 27 электронных ключей, состоящий из и естнадцати :(лектронных ключей К1 -К16, через который обеспечивают юследовательное подключение конденсаторов С1 (16 блока 28 памяти к вь ходу интегратора 20.
С выхода интегратора 20 (фи1 4) си| на.1, представляющий собой сумму полезного сиг- Ha. ia и осгаточщ гх (фиг. 56), чере; ()езист(.|р R и блок 27 ылектроншэгх ключей поступает на б;к)к 28 памяти. Каждый конденсатор (1 С16 блока 28 памяти подключается через резистор R к выходу интегратора 20. В результате этого подключения образуется RC-цегючка, от постоянной времени которой зависит полоса пропускания синхронного фильтра 21. Ослабление оста- точн1)1х niyMf)Ei увеличивается с уменьшением полосы прог1ускания фильтра 21. Однако, чем уже полоса пропускания, тем больн1е время устано лен.чя выходно|-о напряжения фильтра, что при измерении прогибов в движении может привести к сглаживанию фактической прогибограммы при бь 1стром изменении ве- .лпчины прогиба и таким ()б);13ом к увеличению гклрепшостей. При последовательном замыкании электронных ключей К1 К16 блока 27 конденсаторы (1 С16 блока 28 заряжаются, при этом каждый и.ч них заряжается до значения, равного амплитуде входного cnina. ia в данн1 1Й момент вре.мени, определяемой соответствующим импульсом с выходов 2()| 2()|(; рас11реде;1ите;1н 26 имиульсов. Так как пп.-юзный си1 нал имеет периодический характер, т.е. каждый период имеет одну и ту же фазу, то при последующем н()ступ.1ении сигналов на запомииаю- щие конденсаторь) С1 CI6 блока 28 намяти, напряжение на каждом из них изменяется
только по амплитуде в зависимости от изменения величины прогиба.
В то же время, ввиду того, что остаточные П1умы носят случайный характер, т.е. их фаза непостоянна и изменяется в пределах О до 180, , то за период измер ения полезного сигнала, напряжение от действия помехи на запоминающихся конденсаторах С1 - С16 осредняется. В результате чего происходит компенсация сигнала помехи и на выходе буферного усилителя 29 получается сигнал, пропорциональный величине прогиба дорожной одежды (фиг. 5). Этот сигнал поступает на вход регистратора 23 (фиг. 4).
С целью привязки результатов измерения прогибов к пространственной координате в устройство введен измеритель расстояния. С выхода катущки 16 индуктивности импульсы непосредственно поступают на вход счетчика 24 импульсов, который определяет пройденное расстояние путем подсчета пол- ного числа импульсов. Цифровое изображение текущего значения пройденного пути осуществляется на цифровом индикаторе 25.
Таким образом, предлагаемое устройство позволяет повысить точность контроля.
5
0
5
Формула изобретения
Устройство для контроля прочности дорожных одежд, содержащее источник динамического нагружения на спаренные колеса в виде вибратора, виброизолированную те- , 1ежку с измерителем вертикальных перемещений, датчик скорости, умножитель, схему компенсации, синхронный фи. 1ьтр и регистрирующий прибор, причем датчик скорости подключен к одно.му из в.ходов умножителя. выход которого соединен с одним из входов схемы компенсации, другой вход которой
подключен к датчику виброскорости, а выход синхронного фильтра подключен к регистри- руюн1ему прибору, отличающееся тем, что, с целью новышения точности контроля, оно
0 снабжено формирователем синхроимпульсов, вьпюлненным в виде установленной на корпусе вибратора катуп ки индуктивности и «-магнитов, закренленных на валу вибратора, интегратором, счетчиком и измерителем расстояния, а измеритель вертика, 1ьных пе5 ремен1ений выполнен в виде подпружиненного относительно виброизолированной тележки двуплечего рычага, на свободном конце которого установлено изме)ительное колесо с датчиками хт.ловых псргмепд иий и виброскорости, выполненное ин соединенных
0 niajHUipiio планок с роликами в местах сое- .(. иия, ()хваченн1 1ми бесконечным IHOKIIM ободом, и доио.чните.чьных вертикальных планок, крайние из которых соединяют верхние и (жжние ро. жки, а центра.1ьная горизонтальные планки между верхними и ниж ними ролика.ми, при это.м одна из крайних вертикальных п.чаггок соединена L Г1о.-1)унком .датчика чг ловых ne)c ierneHini. жестко установленного на центральной планке, причем датчик скорости подключен к входу счетчика, датчик угловых перемещений соединен с другим входом умножителя, а выход
схемы компенсации подключен через интегратор к одному из входов синхронного фильтра, другой вход которого подключен к формирователю синхроимпульсов.
12
Ъ
ю
(риг. 2.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки прочности дорожных одежд | 1983 |
|
SU1101490A1 |
| Устройство для контроля прочности дорожной одежды | 1984 |
|
SU1183594A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНОЙ ОДЕЖДЫ | 1998 |
|
RU2148691C1 |
| Устройство для контроля дорожных одежд | 1987 |
|
SU1700128A1 |
| Устройство для динамических испытаний дорожных одежд | 1985 |
|
SU1641926A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДОРОЖНЫХ ОДЕЖД | 1999 |
|
RU2170298C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНЫХ ОДЕЖД | 1996 |
|
RU2114242C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНЫХ ОДЕЖД | 1996 |
|
RU2117722C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ДОРОЖНЫХ ОДЕЖД | 1997 |
|
RU2134738C1 |
| Устройство для создания динамической нагрузки на дорожные покрытия | 1980 |
|
SU885398A1 |


Изобретение относится к строительству, конкретно к устройства.м для контроля прочности дорожны.х одежд при дина.миче- ском нагружении но величине yiipyi oi o прогиба. Устройство содержит прицеп 1 с уста- новлениы.ми на нем вибратором 2, обеспечивающим периодическое нагружение на спаренные колеса 3, виброизолированную тележку 4 с измерителем вертикальных перемещений, выполненным в виде подпружиненного относительно виброизолированной тележки двуплечего рычага 5, на свободном конце которого установлены датчик 6 виброскорости и измерительное колесо 7 с закрепленными на нем датчиком 8 угловых пере- меп;ений. Измерительное колесо 7 выполнено из соединенных шарнирно планок с ро.чика- ми в местах их соединения, охваченными бесконечным гибким ободом, и дополнительных вертикальных планок. Центральная планка соединяет горизонтальные планки между верхними и нижними роликами, а крайние планки - верхние и нижние ролики, причем одна из крайних планок соединена с ползунком датчика 8 угловых перемещений, жестко установленного на центральной нланке. Двуплечий рычаг 5 шарнирно соединен с виброизолированной тележкой 4, связанной с нрицепом 1 посредством вертикальных штанг 15. Кроме того, устройство содержит датчик 16 скорости, выполненный в виде катушки индуктивности, неподвижно закреплен РЮЙ на вилке одного из колес тележки 4, и штырей 17, размеп1енных по окружности колеса, умножитель 18, схему 19 компенсации, интегратор 20, синхронный фильтр 21, формирователь 22 синхроимпульсов, регистратор 23, счетчик 24 импульсов и измеритель 25 расстояния. 5 ил. (Л оо го ел ГчЭ
-дар II npfwppppppfppppppppppppp
I
-Г1 X
I
Сг
| Устройство для измерения прогиба дорожной одежды в движении | 1982 |
|
SU1024545A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ разделки точных отверстий для разъемных и неразъемных металлических соединений агрегатов машин, собираемых в стапелях | 1954 |
|
SU101490A1 |
