132565
21 и 23 соединены с входами аналоге- цепи гибкой обратной связи по току вых ключей 17 и 18. Этим обеспечи- якоря в функций магнитного потока веется изменение постоянных времени электродвигателя, 7 ил.
1
Изобретение относится к электротехнике, а именно к электроприводам с упругой механической связью, требующим ограничения электрических и механических нагрузок в процессе пуска, торможения при рабочем процесе и может быть использовано,, например, в электроприводах механизмов экскаваторов, прокатных станов, металлорежущих станков.
Цель изобретения - повьшение надежности за счет увеличения эффективности демпфирования колебаний момента в упругой связи при регулируемом магнитном потоке возбуждения 1
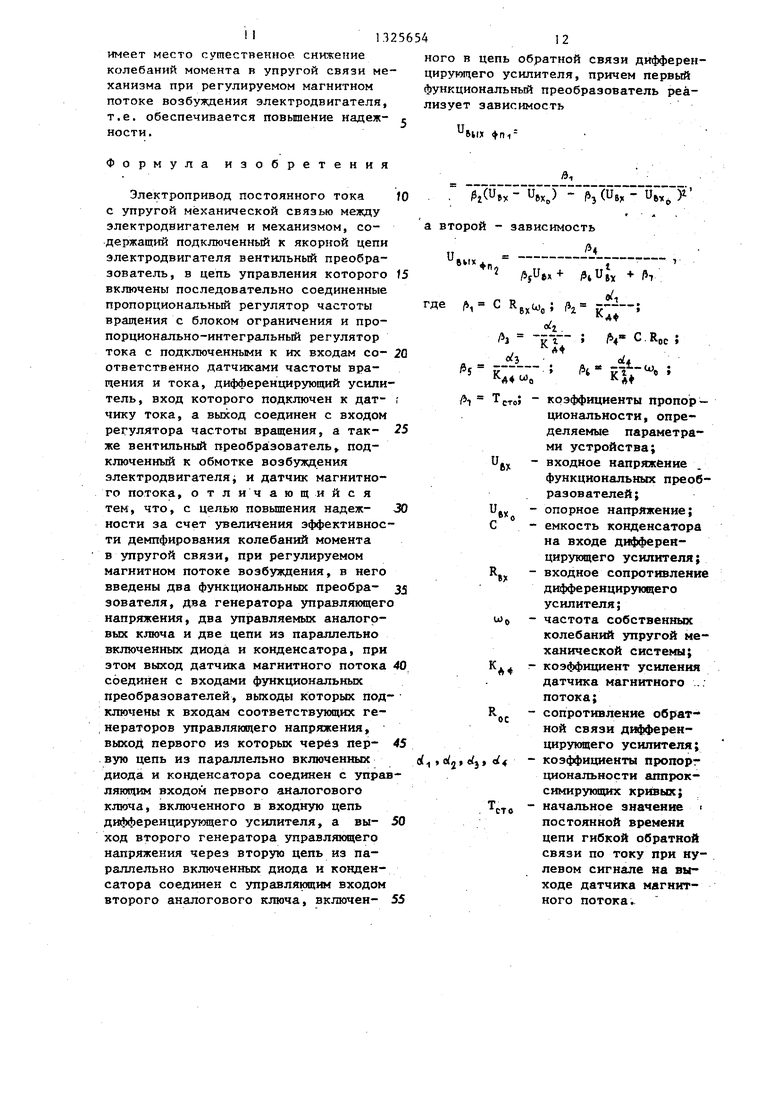
На фиг.1 приведена функциональная схема электропривода; на фиг.2 - амплитудно-частотные характеристики в виде отношения амплитуды момента в упругой связи М, к амплитуде возму,- щающего момента М,, в Функции отноВ
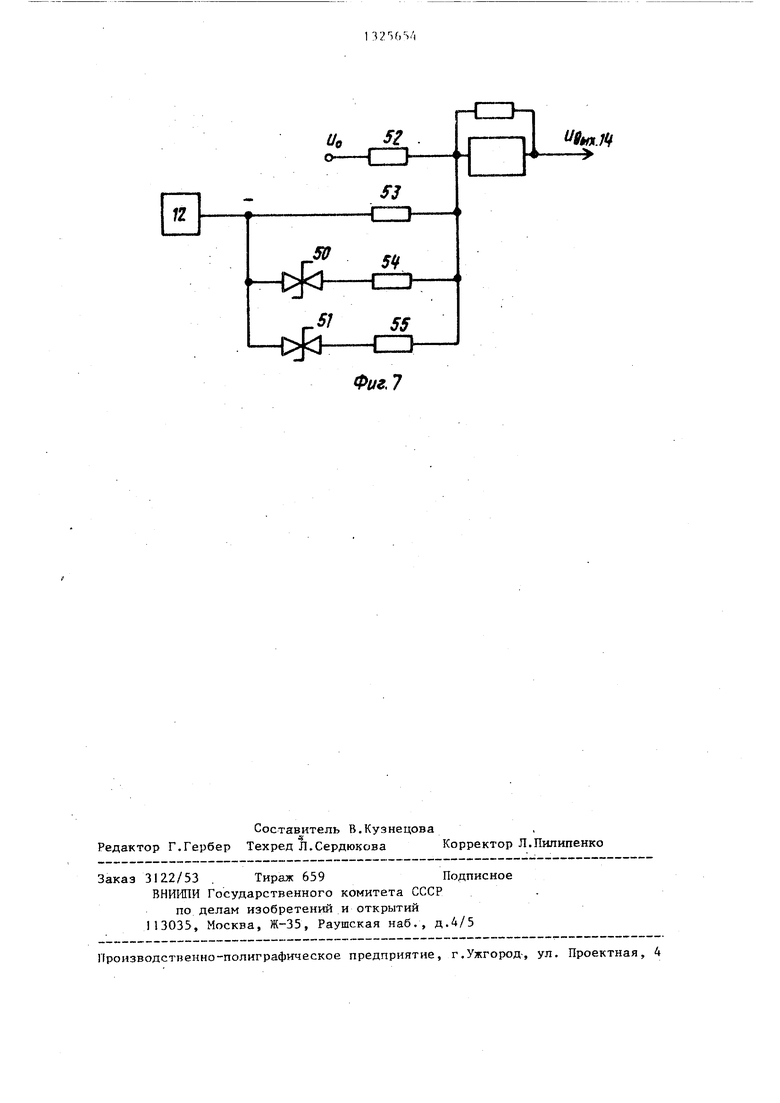
иения частоты возмущающего момента uJg к частоте собственньк колебаний и)дНеде№1фированной двухмассовой механической системы с упругой связью; на фиг.З - зависимости коэффициента динамичности момента в упругой связи М в режиме резонанса от обобщенного безразмерного параметра ц| ; на фиг.4 - оптимальные зависимости относительных значений постоянных времени Гс и и цепи гибкой обратной связи по току от параметра v на фиг.З - кривая выходного напряжения генераторов 15 и 6; на фиг.6 и 7 - примеры выполнения диодных функциональных преобразователей 13 и 14 соответственно.
Электропривод постоянного тока (фиг.П с упругой механической связь между электродвигателем 2 и механизмом 3 содержит подключенный к якорной цепи электродвигателя 2 вен- типьньй -преобразователь 4, в цепь управления которого включены последовательно соединенные пропорциональный регулятор 5 частоты вращения с .
0
5
0
5
0
5
0
5
блоком ограничения и пропорционально-интегральный регулятор 6 тока с подключенными к их входам соответственно датчиками 7 и 8 частоты вращения и тока, дифференцирующий усилитель 9, выход которого подключен к датчику 8 тока, & выход соединен с входом регулятора 5 частоты вращения, а также вентильный преобразователь 10, подключенньй к обмотке 11 возбуждения электродвигателя, и датчик 12 магнитного потока. Электропривод, кроме того, содержит функциональные преобразователи 13 и 14, генераторы 15 и 16 управляющего напряжения, управляемые аналоговые ключи 17 и 18, имеющие общую точку 19, и две цепи из параллельно BKjm4eHH rx диода и конденсатора: первая - из диода 20 и конденсатора 21 , вторая - из диода 22 и конденсатора 23. При этом выход датчика 12 магнитного потока соединен с входами функциональных преоб- разователей 13 к 14, выходы которых подключены к входам соответствующих генераторов 5 и 16 управляющего напряжения, вькод первого из которых через цепь из параллельно включенных диода 20 и конденсатора 21 соединен с управляющим входом аналогового ключа 17, включенного во входную цепь . дифференцирующего усилителя 8, а выход генератора 16 управляющего напряжения через цепь из параллельно включенных диода 22 и конденсатора 23 соединен с управляющим входом аналогового ключа IВ, включенного в цепь -обратной связи дифференцирующего усилителя 9. Дифференцирующий усилитель 9 образован усилителем 24 во входную цепь которого включены ; езистор 25 и конденсатор 26, а в цепь обратной связи усилитель 27. Функциональ- ньтй преобразователь 13 реализует зависимость
U,
и,
ft
.хп.(,(и,,-и,„)
а функциоиальиъпт преобразователь 14 зависимость
, 54
b.4n HiM4,,,
где р, CRg, UV oi,dt
12
11
CR, C.Rj, ;
If
15« 0
6
I/I
11
w.
- коэффициенты пропорциональности, определяемые параметрами устройства (числовые индексы здесь и далее
при параметрах соответствуют порядковому номеру элемента на схеме);
- входное напряжение 25 функциональных преобразователей 13 и 14, равное выходному напряжению датчика потока
и
гг и jjg- опорное напряжение;
С C«j - емкость конденсатора 26 на входе дифференцирующего усилителя 9;
R R. - сопротивление резистора 25 на входе дифференцирующего усилителя
.9;
Wo частота собственных колебаний упругой механи- Q ческой системы;
Кдф - коэффициент усиления датчика 12 магнитного потока;
R 17 сопротивление резисто- « ра 27 в цепи обратной i связи дифференцирующе- , го усилителя;
i , о }, е 4 коэффициенты пропорциональности аппрокси- Q мирующих кривых (фиг.4);
- начальное значение . постоянной времени цепи гибкой обратной связи по току при нулевом сигнале на выходе датчика 12 магнитного потока (фиг.4).
Кривая 28 (фиг.2) соотлетстнуе.т амплитудно-частотной характеристике без гибкой отрицательной обратной связи, криный 29 и 30 получены при введении этой обратной связи, причем кривая 29 соответствует оптимапьному значению постоянной времени Т, при Тф э а кривая 30 - оптимальному сочетанию постоянных времени Т и Т цепи гибкой обратной связи с передаточной функцией
5
0
5
0
Q
W (р)
)Тст
(I)
1+ рТ,
Кривые 31-33 (фиг.З) соответствуют оптимальным значениям постоянной времени TJ.T (при Т - Т), изменяемым в функции величины магнитного потока возбуждения электродвигателя; кривые 34 - 36 получены при оптимальном сочетании постоянных времени TJ-T. и Тф. Кривые 31 и 34 соответствуют коэффициенту соотношения моментов инерции двигателя 1 и механизма К2 ---- 0,4; кривые
32 и 35 - Kj 0,6; кривые 33 и 36 Kj, 0,8. Кривые 37 и 38 (фиг.4.) соответствуют оптимальному сочетанию постоянных времени Т,, цепи гибкой связи
о
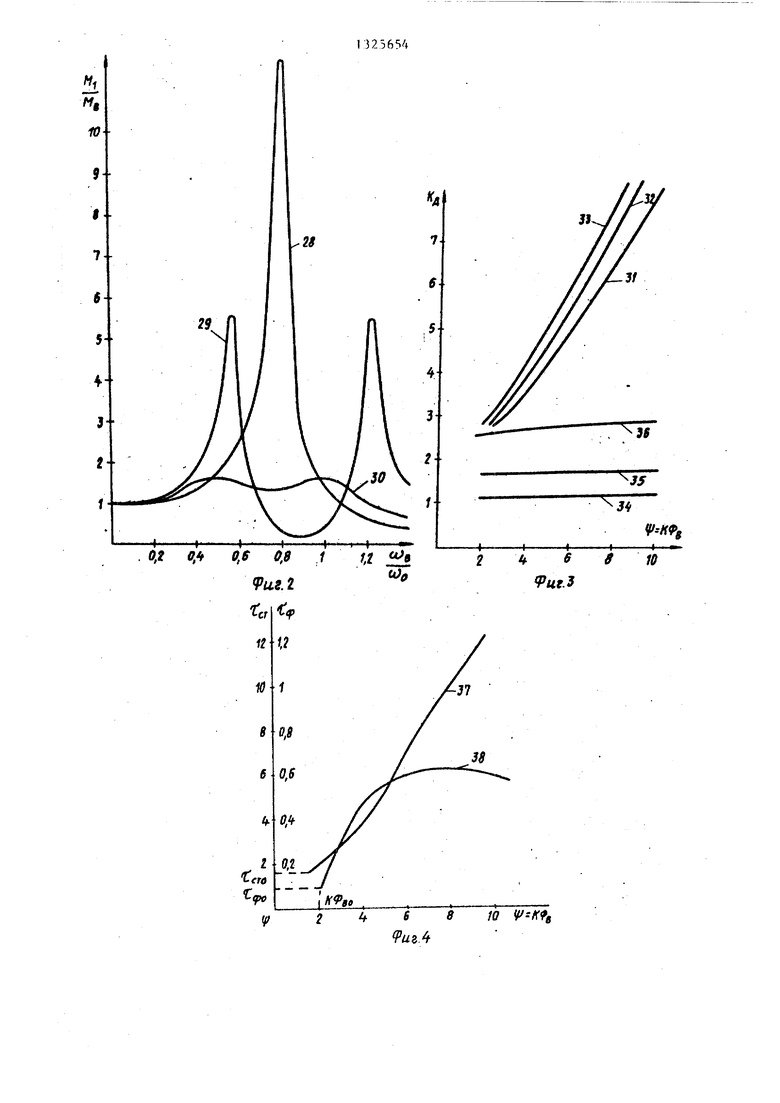
по току, имегацей передаточную функцию (О, при регулируемом магнитном потоке возбуждения ф(для коэффициента К 0,8). На фиг.5 - кривая 39 напряжения прямоугольной формы, вырабатываемого генераторами 14 и 15.
На фиг.6 приняты следующие обозначения: стабилизаторы 40-43, резисторы 44-48, инвертор 49; на фиг.7 - стабилитроны 50-51, резисторы 52-55.
Коэффициент динамичности
и Тф
К
MB
(2)
обобщенный безразмерный параметр
ц,
3,
(3)
где 6j - электромеханическая постоянная времени электродвигателя, которая для системы подчиненного регулирования с пропорциональным регу- i лятором частоты вращения определяет- ся зависимостью
ы-Хрс
Кдт
к
где 1 - момент инерции двигателя;
Кд, коэффициенты передачи датчиков тока и частоты вращения;
KPJ, коэффициент усиления регулятора частоты вра1чения;
коэффициент пропорциональности между моментом и током электродвигателя. Из зависимостей (3),(4) и (5) следует ,что величина параметра v пропорциональна магнитному потоку возбуждения элеткродвигателя Ф g
to
1 К-Фз,
где К коэффициент пропорциональности, который определяется соотношением
К -Siii-5 l CL . Ii ,
Относительные значения постоянных времени цепи гибкой связи по току определяются как
(4) ся по знаку напряжение прямнугч льной формы Ujj,, (кривая 39, фиг.5) с неизменным временем одного периода Т и регулируемым интервалом времени Т , 5 на котором напряжение U, положительно. Интервал времени t регулируется в зависимости от величины напряжения, поступающего на вход генераторов от функциональных преобразователей I3 и 14, т.е. в зависимости от величины магнитного потока возбуждения двигателя в, измеряемого датчиком 12. По мере возрастания напряжения на входе генераторов длительность интервала времени t уменьшается.
Когда выходное напряжение , генератора 15 положительное, оно через диод 20 поступает на управляющий вход ключа 17, и этот ключ размыкается . Когда выходное напряжение Uj, генератора 15 отрицательное - диод 20 оказьшается включенным в обратном направлении, при этом на управ- (7) эс ляющий вход ключа 17 напряжение не
поступает, KJno4 17 замкнут. При достаточно малом времени периода Т выходного напряжения генератора (фиг.5) эквивалентное значение сопротивления резистора 25 определяется соотноше15
(6)
20
30
Т
I
стШ, ,
, IOCS)
(9)
Электропривод работает следующим образом.
При изменении величины магнитного потока возбуждения g значение постоянной времени Т изменяется пропорционально изменению эквиваленного сопротивления резистора 25 во входной цепи усилителя 24, а значение постоянной времени Т - пропорционально изменению эквивалентного сопротивления резистора 27 в цепи обратной связи этого усилителя.. Для изменения эквивалентных сопротивлений резисторов 25 и 27 используют специализированные фильтры.
Эквивалентные значения сопротивлений резисторов 25 и 27 изменяются в зависимости от соотношения интервалов времени, соответствуняцих : замкнутому и разомкнутому состоянию ключей 17 и 18, включенных последовательно с этими резисторами и управляемых генераторами 15 и 16 уп-- равЛяющего напряжения, которые вы- рабатьгоают периодически изменяющеепостутаточ ходно эквив резис
нием
L.-
(10)
где R2S сопротивление резистора 25.
Характеристики функциональных
преобразователей 13 и 14 определяются из условия обеспечения приведенного на фиг.4 оптимального сочетания постоянных времени Т. и Т ф цепи гибкой отрицательной обратной связи по току якоря при изменении магнитного потока возбуждения электродвигателя. Рассмотрим, как определяются, и реализуются эти характеристики,
Функциональный преобразователь 13 включен на выход датчика I2 магнитного потока возбзшдения двигателя, т,е. напряжение на его входе Uj, пропорционально магнитному потоку
и 6x1} - К„(11)
где К - коэффициент пропорциональности датчика потока. Интервал времени 1 , на котором напряжение U j,, ,j. положительно (фиг,5 ), зависит от выходного напряфункционального преобразова1 3 и,
ЯИХ 13
Г Т ( 1 и
5ЫЧ 1
2U,
),
(12
мещ
где и,
Смещ.
- постоянное по величине
напряжение смещения. Когда напряжение генератора 15 ,,. положительное, ключ 17 разомкнут, т.е. он разомкнут в течение интервала времени Т по уравнению (12).
При отрицательном напряжении
и. , ключ 17 замкнут. Эквивалентных г п
кое сопротивление резистора /5 Rj5 включенного последовательно с конденсатором 26 во входную цепь усилителя 24, определяется уравнением (10), т.е.
R -5 25
т.где Rji сопротивление резистора 25,
Постоянная времени Т цепи гибкой связи по току по уравнению (1), которая имеет передаточную функцию
W(p)
Т+рТф
зависит от сопротивления R,, Тф « С 2J Rj JJ ,
(15)
30 где и j, - напряжение на входе функционального преобразователя 13 при магнитном потоке Ф ФВР . Приравнивая правые части уравнегде Сц - емкость конденсатора 26. 35 ний (16) и (19), получаем характеристику функционального преобразователя 13, т.е. зависимость между его выходным и входным напряжениями
Подставив в уравнение (15) выражения (12) и (13), получим
1
Ч
С2гКп-2
(16)
40
вИМ1(8Пь)
2s 2Ucwem W,
oil
- /
кГ в
Уравнение (20 можно представить в виде
и
l(U
)(
где коэффициенты ft , деляются равенствами
/ij и р опре и и 2Uc(,; 0(1 d«
к;г
j vl
11
Таким образом, на рабочем участке при Ф J Фво характеристика
fO
т.е. постоянная времени Тф обратно пропорциональна вел тчине выходного напряжения функционального пт)еобра- зователя 13 .
Относительная величина постоянной времени 1ф- должна изменяться в функции магнитного потока Ф по зависимости реализуемой -кривой 38 (фиг.4). Эта зависимость может быть аппроксимирована уравнениями:
а) При Ф( 7
Ч
Ф
во
(Ф, - Ф,)., - (Ф,- ,
(17)
20
где «.1 и C/J - козффициенты пропорци-;
ональности. б) При Ф Фбо
(13)
Г const Сфо
(18)
5
С учетом уравнения (I1) уравнение (17) можно представить в виде
н . 1 Г fu
R,i
)
- exc) - -- (..- и
(19)
-вхи
(15)
. 3
(16)
35
40
К (xii bfo
12
r
(20)
функционального преобразователя 13 енд 1э°° (Ичз ) описывается уравнением (21) . На начальном участке при Ф( вв выходе функционального преобразователя 13 поддерживается неизменное максимальное напряжение .1, . соответствукядее постоявО 15 mQKC/-
„ Фo
НОЙ времени Т , Это иапря5 женив, согласно уравнению (16) определяется зависимостью
и
лг ц а НС
SlL5i 2y Mtuj
Тфо
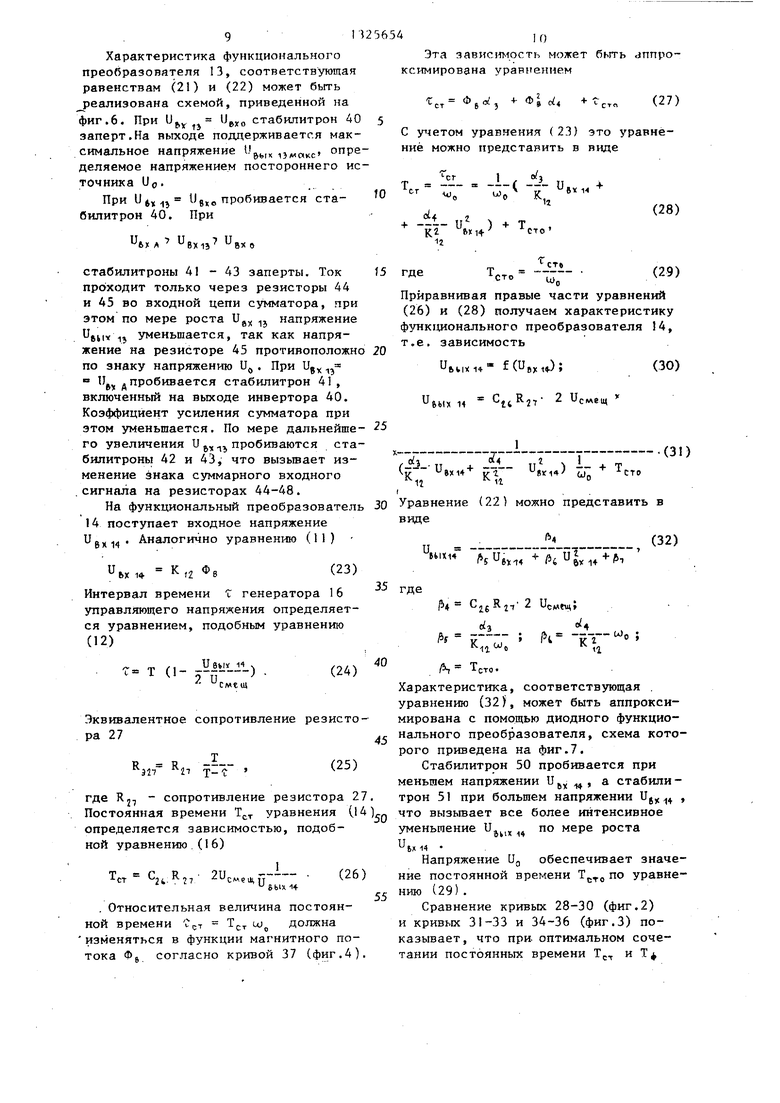
Характеристика функционального преобразователя 13, соответствующая равенствам (21) и (22) может быть реализована схемой, приведенной на
фиг.6. При Uj, стабилитрон 40 заперт.На выходе поддерживается максимальное напряжение l- .x тз/иокс опре.- деляемое напряжением постороннего источника DO.
При и 4 иgje пробивается стабилитрон 40. При
U6,.
8X1,7 и,,.
стабилитроны 41-43 заперты. Ток J5 где проходит только через резисторы 44 и 45 во входной цепи сумматора, при этом по мере роста U j напряжение ebiv и уменьшается, так как напряжение на резисторе 45 противоположно 20 по знаку напряжению U,. При Uj Uj дпробивается стабилитрон 41, включенный на выходе инвертора 40. Коэффициент усиления сумматора при этом уменьшается. По мере дальнейше- 25 го увеличения U j,, пробиваются стабилитроны 42 и 43, что вызьшает изменение знака суммарного входного сигнала на резисторах 44-48.
На функциональный преобразователь 30 14 поступает входное напряжение
Прир (26) функ т.е.
и
вх It
и,
Аналогично уравн
К,2 Фв
лх 1 - (2 В
Интервал времени t ген управляющего напряжения ся уравнением, подобным (12)
и env 11
Т (12 и
-)
CMtm
Эквивалентное сопротивление резисто- ра 27
47
Т
т(25)
где Rj - сопротивление резистора 27 Постоянная времени Т. уравнения (14 определяется зависимостью, подобной уравнению.(16)
2U
I
смет Vj
(26)
БЬ Х. 14
. Относительная величина постоянной времени Т, со, должна изменяться в функции магнитного потока j согласно кривой 37 (фиг.4).
2565410
Эта зависимость может быть аппроксимирована уравнением
т Ь
-ст I
+ Ф
(27)
С учетом уравнения (23) это уравнение можно представить в виде
Т
СГ
(j)
К
ВХ
1г
J
--- и )
кг Ь
-12
+ Т
сто
(28)
сто
(29)
где
Приравнивая правые части уравнений (26) и (28) получаем характеристику функционального преобразователя 14, т.е. зависимость
и
6ИХ 14f(UBxi);
(30)
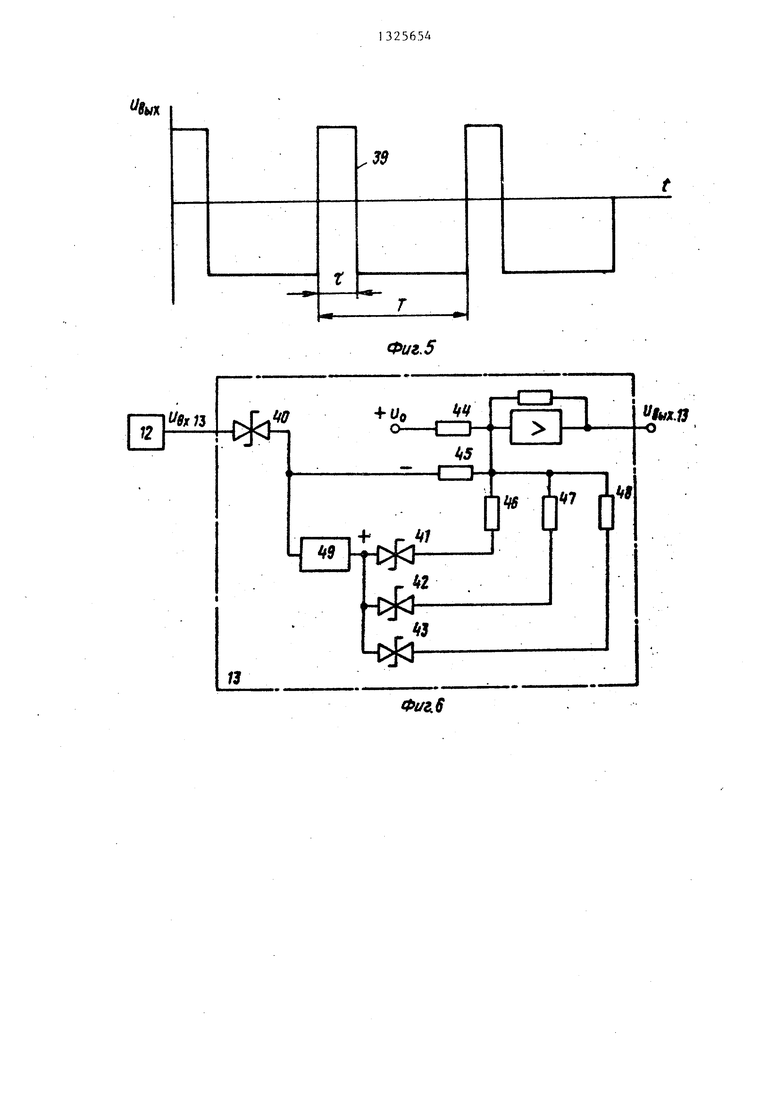
Характеристика, соответствующая . уравнению (32 У, может быть аппроксимирована с помощью диодного функцио- нального преобразователя, схема которого приведена на фиг.7.
Стабилитрон 50 пробивается при
меньшем напряжении U
ЬХ -W
а стабили
трон 51 при большем напряжении Uj , что вызывает все более интенсивное уменьшение U по мере роста
.
Напряжение Ug обеспечивает значение постоянной времени Т по уравнению (29) .
Сравнение кривых 28-30 (фиг.2) и кривых 31-33 и 34-36 (фиг.З) показывает, что при оптимальном сочетании постоянных времени Т, и Т
II1325654
имеет место сугаественное. снижение колебаний момента в упругой связи механизма при регулируемом магнитном потоке возбу}вдения электродвигателя, т.е. обеспечивается повышение надеж- - ности.
Формула изобретения
Электропривод постоянного тока с упругой механической связью между электродвигателем и механизмом, содержащий подключенный к якорной цепи электродвигателя вентильный преобразователь, в цепь управления которого включены последовательно соединенные пропорциональный регулятор частоты вращения с блоком ограничения и пропорционально-интегральный регулятор тока с подключенными к их входам со- ответственно датчиками частоты вращения и тока, дифференцирующий усилитель, вход которого подключен к дат- чику тока, а выход соединен с входом регулятора частоты вращения, а так- же вентильный преобра зователь , подключенный к обмотке возбуждения электродвигателяi и датчик магнитного потока, отличающийся тем, что, с целью повышения надеж- ности за счет увеличения эффективности демпфирования колебаний момента в упругой связи, при регулируемом магнитном потоке возбуждения, в него введены два функциональных преобра- зователя, два генератора управляющег напряжения, два управляемых аналоговых ключа и две цепи из параллельно включенных диода и конденсатора, при этом выход датчика магнитного потока соединен с входами функциональных преобразователей, выходы которых под ключены к входам соответствующих генераторов управляющего напряжения, выход первого из которых через пер- вую цепь из параллельно включенных диода и конденсатора соединен с упраляющим входом первого аналогового ключа, включенного в входную цепь дифференцирующего усилителя, а вы- ход второго генератора управляющего напряжения через вторую цепь из параллельно включенных диода и конденсатора соединен с управлякицим входом второго аналогового ключа, включен-
12
ного в цепь обратной связи дифференцирующего усилителя, причем первый функциональный преобразователь реализует зависимость
и
SHX tm
Й1
v - P3(us, - и;,; )
а второй - зависимость
и
А4
(kix
и + /i, Л...
А
де /4, С ), ; г jj
Л
.
Aj - ос 5
/
г---- ; Ai ;
А
Т сто коэффициенты пропорциональности, определяемые параметрами устройства;
вх
и
ex,
tf
и.„ - входное напряжение
функциональных преобразователей;
-опорное напряжение;
-емкость конденсатора на входе дифференцирующего усилителя;
-входное сопротивление дифференцирующего усилителя;
Шо - частота собственных
колебаний упругой механической системы;
К - коэффициент усиления датчика магнитиого .. потока;
Rj - сопротивление обратной связи дифферен- цирукицего усилителя; 1 efj, оС - коэффициенты пропорг циональности аппроксимирующих кривых;
-начальное значение постоянной времени цепи гибкой обратной связи по току при нулевом сигнале на выходе датчика магнитного потока.
сто
JK
3S
J
f--/f J
-
jr
7
9ut.y
t-er 12
Ю 8 6
f
t
ff,2
K9,o
68
игА
Ш V -fffg
12
%;з
1
13
-ООтФ -ф
Фиг.5
JH
5
В
iWx.fl о
Ф -ф
ТП
42
41
Фиг, ft
Составитель В.Кузнецова Редактор Г.Гербер Техред Л.Сердюкова
Заказ 3122/53 . Тираж 659Подписное
ВНИШИ Государственного комитета СССР.
по делам изобретений и открытий 13035, Москва, Ж-35, Раушская наб,, д.4/5
Производстненно-полиграфическое предприятие, г.Ужгород-, ул. Проектная, 4
Фиг, 7
Корректор Л.Пилипенко
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
| Устройство для управления и защиты преобразователя | 1986 |
|
SU1403281A2 |
| Измерительный преобразователь активной мощности | 1989 |
|
SU1659890A1 |
| Устройство для защиты трехфазного асинхронного электродвигателя от перегрузки | 1985 |
|
SU1310943A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| Электропривод постоянного тока | 1986 |
|
SU1436255A1 |
| Устройство для фазового управления тиристорным регулятором | 1981 |
|
SU1005267A1 |
| Устройство для управления и защиты преобразователя | 1985 |
|
SU1336171A1 |
| МАГНИТОМЕТР СО СВЕРХПРОВОДЯЩИМ КВАНТОВЫМ ИНТЕРФЕРОМЕТРИЧЕСКИМ ДАТЧИКОМ | 2011 |
|
RU2481591C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
Изобретение относится к электротехнике и может быть использовано в приводах с упругой механической связью. Целью изобретения является повьшение надежности за счет увеличения эффективности демпфирования колебаний момента в упругой связи . при регулируемом магнитном потоке электродвигателя. Устройство содержит датчик магнитного потока 9, выход которого соединен с входами функциональных преобразователей 13 и 14, выходы которых соединены с входами генераторов 15 и 16. Выходы генераторов 15 и 16 через параллельно- включенные диоды 20 к 22 и конденсаторы 71 (Л apF Lff.-l Со Ю сл а СП 1
| Борцов Ю.А., Соколовский Г.Г | |||
| Тиристорные системы электропривода с упругими связями | |||
| - Л.: Энергия, 1979, с.59,82 | |||
| 0 |
|
SU203038A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ольховиков Б.В | |||
| и др | |||
| Оптимизация САР тиристорного электропривода подъема при случайной нагрузке | |||
| Известия вузов | |||
| Горный журнал, 1982, 9, с. | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
