Изобретение относится к электротехнике, к электроприводам с воя- вратно-поступательным перемещением и,может быть использовано в машинах для разрушения горных пород., в электроинструменте для создания ударной нагрузки в приводах для возвратно-поступательного перемещения различных механизмов, узлов и деталей.
Цель изобретения - повышение надежности путем исключения ложного срабатывания датчиков положения.
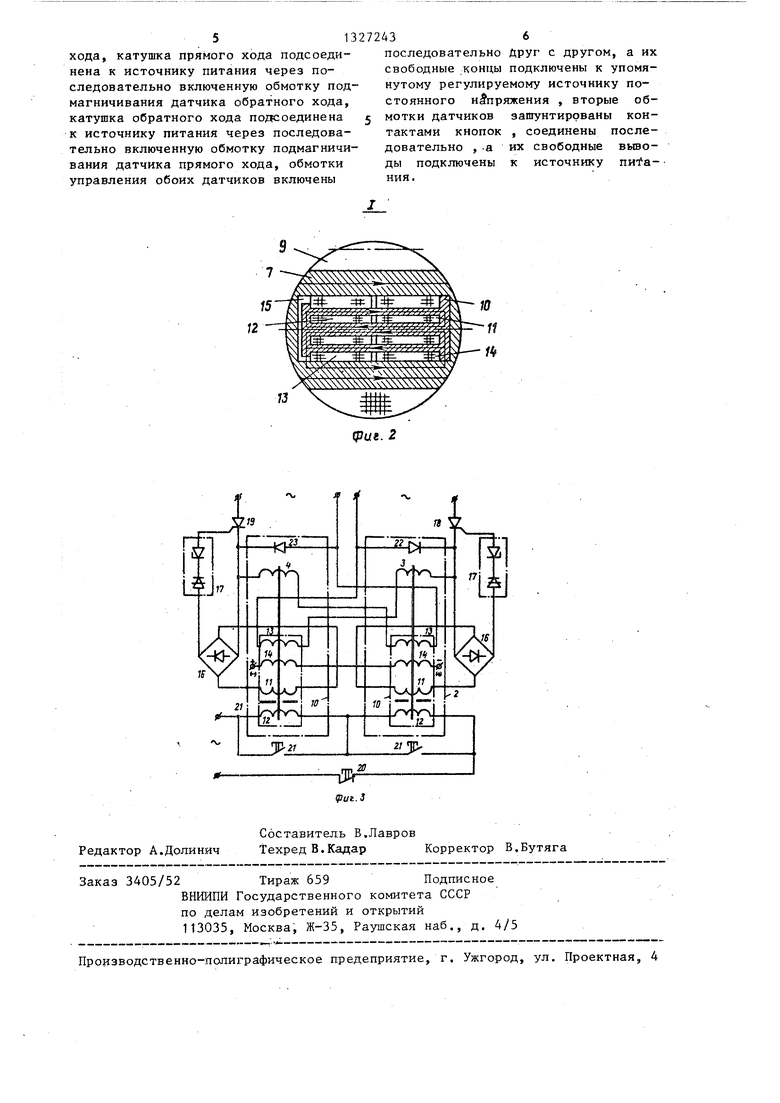
На фиг.1 показан электромагнитный двигатель возвратно-поступательного движения по оси симметрии, разрез; на фиг.2 - узел I, изображенный на фиг.1; на фиг.З - схема включения электропривода возвратно- поступательного движения.
Электропривод содержит электромагнитный двигатель возвратно-поступательного движения 1,включающий маг- нитбпровод, выполненный в виде двух секций 2 для катушки 3 прямого хода и катушки 4 обратного хода. Якорь 5 размещен в направляющих втулках 6 между торцами 7 секций магнитопроводов
нут воздушным зазором 15 между датчиком 10 и-расточкой в торце 7. Обмотка 11 датчика прямого хода подключена через диодный мост 16 и ключе; „ ,
вой элемент 17 к управляющему электроду силового тиристора 18 в цепи катушки 3 прямого хода. Обмотка 11 датчика обратного хода подключена
10 через другой диодный мост 16 и другой ключевой элемент 17 к управляющему электроду силового тиристора 19 в цепи катушки 4 обратного хода. Обмотки 12 датчиков соединены между со
15 бой и с размыкающим контактом кнопки 20 последовательно и подключены к источнику питания переменного напряжения. Обмотка 12 каждого датчика шунтируется кнопкой 21 с замыкающим
20 контактом. Катушка 3 прямого хода подсоединена к источнику питания переменного напряжения через последовательно включенную обмотку 13 под- магничивания датчика обратного хода
25 и тиристор 18. Катушка 4 обратного хода подсоединена к источнику питания переменного напряжения через последовательно включенную обмотку 13 подмагничивания датчика прямого хокатушки 3 и катушки 4. Передача уда- 30 Да и тиристор 19. Катушка 3 с обмоткой 13 зашунтирована обратным Диодом 22, а катушка 4 с обмоткой 13 - обратным диодом 23. Обмотки 14 управ ления обоих датчиков включены последовательно друг с другом, а их свободные концы подключены к регулируемому источнику постоянного напряжения. Обмотка 13 датчика обратного хода может также включаться па- 40 раллельно катущке 3 прямого хода. Аналогично обмотка 13 датчика прямого хода может включаться параллельно катушке 4 обратного хода.
ра (усилия) от якоря 5 к исполнительному механизму 8 осуществляется толкателем 9. В системе управления электроприводом применены трансформаторные датчики 10 для контроля положения якоря при прямом и обратном ходе. Каждый датчик размещен в кольцевой расточке,, выполненной в торце 7 эксцентрично относительно оси симметрии электропривода. Датчик представляет собой броневой сердечник, на среднем стержне которого размещены обмотки 11 и 12 переменного тока. По внешнему диаметру броневого сердечника выполнена кольцевая расточка, в которой размещешз силовая обмотка 13 подмагничивания постоянного тока и обмотка 14 управления постоянного тока. Установка датчика 10 эксцентрично относитель-зо датчиков равны между собой. Равны
но оси электропривода уменьшает габариты и повышает эффективность работы датчика за счет уменьшения его диаметра и увеличения .кратности изменения напряжения на обмотках 12 и 11 при подмагничивании. Магнито- провод вокруг обмоток 11 и 12 замк,- .нут. КагНитопровод вокруг обмоток 13 и 14 может быть замкнут или разомкж3272432
нут воздушным зазором 15 между датчиком 10 и-расточкой в торце 7. Обмотка 11 датчика прямого хода подключена через диодный мост 16 и ключе; „ ,
вой элемент 17 к управляющему электроду силового тиристора 18 в цепи катушки 3 прямого хода. Обмотка 11 датчика обратного хода подключена
10 через другой диодный мост 16 и другой ключевой элемент 17 к управляющему электроду силового тиристора 19 в цепи катушки 4 обратного хода. Обмотки 12 датчиков соединены между со15 бой и с размыкающим контактом кнопки 20 последовательно и подключены к источнику питания переменного напряжения. Обмотка 12 каждого датчика шунтируется кнопкой 21 с замыкающим
20 контактом. Катушка 3 прямого хода подсоединена к источнику питания переменного напряжения через последовательно включенную обмотку 13 под- магничивания датчика обратного хода
25 и тиристор 18. Катушка 4 обратного хода подсоединена к источнику питания переменного напряжения через последовательно включенную обмотку 13 подмагничивания датчика прямого хоДа и тиристор 19. Катушка 3 с обмот
кой 13 зашунтирована обратным Диодом 22, а катушка 4 с обмоткой 13 - обратным диодом 23. Обмотки 14 управления обоих датчиков включены последовательно друг с другом, а их свободные концы подключены к регулируемому источнику постоянного напряжения. Обмотка 13 датчика обратного хода может также включаться па- раллельно катущке 3 прямого хода. Аналогично обмотка 13 датчика прямого хода может включаться параллельно катушке 4 обратного хода.
Эл ектропривод работает следующим образом.
При поданном напряжении питания ( на датчики 10 и в силовые цепи (обмотки 14 управления датчиков отклюены) напряжения на обмотках 12
между собой и выходные напряжения, снимаемые с обмоток 11 датчиков прямого и обратного хода. Постоянные напряжения на диодных мостах 16 не- 55 достаточны для переключения элементов 17 и открывания силового тиристора 1.8 или 19. Катушки 3 и 4 обесточены, подмагничивающие -обмотки 13 датчиков прямого и обратного хода
током не обтекаются. Якорь 5 находится в крайнем левом положении со стороны катушки 4. При нажатии кнопки 21 ее замыкающий контакт шунтирует обмотку 12 датчика обратного хода . Напряжения на обмотках 11 и 12 датчиков прямого хода возрастают, что приводит к переключению злемен- та 17 и включению тиристора 18. Катушка 3 прямого хода и подмагни- чивающая обмотка 13 датчика обратного хода обтекаются током. Катушка 3 перемещает якорь вправо. После остановки якоря магнитная индукция в магнитопроводе катушки прямого хода продолжает расти, а индуктивность обмотки 12 датчика прямого хода уменьшается. Напряжение на обмотке 11 указанного датчика уменьшается настолько, что ключевой элемент 17 закрывается и тиристор 18 отключается, обесточивая сатушку 3 и обмотку 13 датчика обратного хода. Напряжение на обмотках 12 и 11 датчика обратного хода возрастает настолько, что включается тиристор 1 в цепи катушки 4 и обмотки 13 датчика прямого хода. Якорь перемещается в левое положение в сторону катушки 4 обратного хода. Далее процесс переключения катушек 3 и 4 повтряется, обеспечивая возвратно-поступательное перемещение якоря. При включении катушки 4 катушка 3 не долна включаться. Этой цели слуткит обмотка 13, которая при включенной катушке 4 подмагничивает датчик прямого хода, не позволяя возрасти напряжению на -обмотке 11 в датчике прямого х(Уда до величины пробоя переключающего злемента 17 и включиться тиристору 18 в цепи катушки 3. Аналогично предотвращается включение тиристора 19 в цепи катушки 4, когда включен тиристор 18 в цепи катушки 3. Остановка привода осуществляется нажатием кнопки 20 с размыкаю- щим контактом. При этом обмотки 12 обесточиваются и тиристоры 18 и 19 отключаются.
При подаче регулируемого постоянного напряжения на обмотки 14 управления датчика прямого и обратного хода дополнительно подмагничиваются током указанных обмоток. В результате магнитная индукция постоянного пол я, с 6 Сдаваемая в каждом датчике током катушки 3 или 4, увеличивается или
72434
уменьшается. Таким образом изменяется момент запирания тиристора одной катушки и соответственно отпирания тиристора другой катушки, т.е. регулируется частота перемещения якоря, а следовательно - энергия удара. С применением предлагаемого устройства обеспечивается надежное возвратно-поступательное движение механизма независимо от массы якоря, величины его хода и скорости перемещения. Такая расширенная область применения избавляет от необходимости получения возвратно-поступательного движения путем использования электродвигателя с механическим преобразователем, имеюпцгм низкую энергию удара, невысокую надежность и повышенную стоимость.
10
15
20
Формула изобретения
Электропривод возвратно-поступательного движения, содержащий электромагнитный двигатель возвратно-поступательного движения, включакиций магнитопровод с катушками прямого-и обратного хода, якорь в направляющих и средство передачи удара, и систему управления, включающую источник питания переменного напряжения, трансформаторные датчики положения якоря прямого и обратного хода с двумя обмотками, размещенными на торцах магнитопровода, два силовых тиристора, через которые катушки прямого и обратного хода подключены к источ- нику питания, и кнопку с замыкакяцим контактом, отличающийся тем, что, с целью повышения надежности путем исключения ложного срабатывания датчиков положения, система управления снабжена дополнительной кнопкой с замыкающим контактом, двумя диодными мостами и регулируемым источником постоянного напряжения, каждый из датчиков снабжен силовой обмоткой подмагничивания постоянного тока и обмоткой управления постоянного тока, первая обмотка датчика .: прямого хода подключена через диодный мост к управляющему электроду тиристора в цепи катушки прямого хода, первая обмотка датчика обратного хода подключена через другой диодный мост к управляняцему электроду тиристора в цепи катушки обратного
хода, катушка прямого хода подсоединена к источнику питания через последовательно включенную обмотку под- магничивания датчика обратного хода, катушка обратного хода подсоединена к источнику питания через последовательно включенную обмотку подмагничи- вания датчика прямого хода, обмотки управления обоих датчиков включены
последовательно Друг с другом, а их свободные концы подключены к упомянутому регулируемому источнику постоянного напряжения , вторые обмотки датчиков зашунтиррваны контактами кнопок , соединены последовательно , -а их свободные выводы подключены к источнику питания.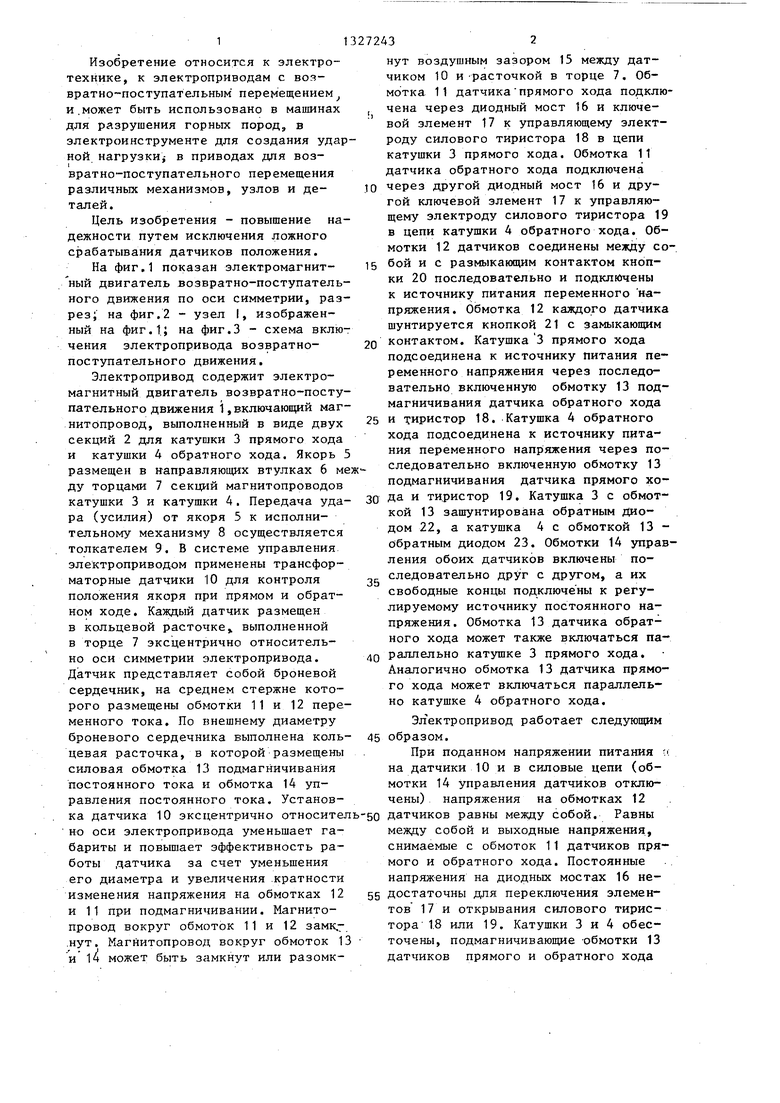

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты от перегрузки электродвигателя постоянного тока | 1980 |
|
SU951541A1 |
| Электропривод возвратно-поступательного движения | 1987 |
|
SU1515275A1 |
| Устройство для пуска реверсивного электродвигателя | 1984 |
|
SU1259453A1 |
| ЭЛЕКТРОПРИВОД УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2017319C1 |
| Преобразователь постоянного напряжения | 1981 |
|
SU974526A1 |
| Устройство для измерения разности давлений | 1982 |
|
SU1064172A1 |
| Тиристорный преобразователь постоянного напряжения для управления двигателем постоянного тока | 1979 |
|
SU855893A1 |
| Устройство для пуска реверсивного электродвигателя | 1987 |
|
SU1443108A1 |
| Электропривод | 1990 |
|
SU1830611A1 |
| ЭЛЕКТРИЧЕСКИЙ МОЛОТ | 1989 |
|
RU2018652C1 |
Изобретение относится к электротехнике, к приводам с возвратно-поступательным перемещением. Цель состоит в повьшении надежности путем исключения ложного срабатывания датчиков положения. Электропривод содержит электромагнитный двигатель 1 возвратно-поступательного движения, содержащий магнитопровод с катушками прямого 3 и обратного 4 ходов. Система управления содержит трансформаторные датчики 10 для контроля положения якоря при прямом и обратном ходе. Катушки прямого 3 и обратного 4 ходов подсоединены к источнику питания переменного напряжения соответственно через последовательно включенные обмотки подмагничивания 13 датчиков прямого или обратного ходов и тиристор. При подаче регулируемого постоянного напряжения на обмотки управления 14 датчики прямого и обратного ходов дополнительно подмаг- ничиваются током указанных обмоток. Таким образом, изменяется момент запирания тиристора одной катушки и соответственно отпирания тиристора другой катушки, т.е. регулируется частота перемещения якоря, а следовательно, и энергия удара. 3 ил. (Л 4( 6 fI 5 21 I I I ///1///77У ;N . эдр г f J 7т / v 4 3 6 ,L,,,L,A 1 ///АШ р ч N1 Р / фигЛ . 
;
От
7J
(рие. 2
Составитель В.Лавров Редактор А.Долинич Техред В.Кадар Корректор В.Бутяга
.. --.-ер-- - - - - - --- -- - .
Заказ 3405/52 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предеприятие, г. Ужгород, ул. Проектная, 4
| Электропривод | 1980 |
|
SU991557A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромагнитный молот | 1980 |
|
SU877626A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
