(54) ЭЛЕКТРОПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136294A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2125760C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2096896C1 |
| Электропривод | 1975 |
|
SU597051A1 |
| Электропривод | 1990 |
|
SU1830611A1 |
| Электропривод возвратно-поступательного движения | 1987 |
|
SU1515275A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1989 |
|
SU1731018A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1991 |
|
RU2046540C1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
Изобретение относится к устройствам управления и измерения параметров электромагнитных машин возвратно-поступательного движения, применяемых для забивки свай, дробления негабаритов, разрушения мерзлого грунта, а также применяемых в приводе компрессоров, прокатных станов источников сейсмических колебаний и ., которые находят широкое применение в различных отраслях промыш тенности, в частности предназначено для измерения перемещения и скорости якоря электромагнитного двигателя возвратно-поступательного движения, и, следовательно, может быть использовано в системах регулирования этих величин в указанных двигателях.
Известен электромагнитный двигатель , содержащий якорь, закрепленный в направляющей, и катушку с полюсами I 1 .
Однако это устройство не позволяет осуществлять контроль за положением якоря.
Известно устройство контроля положения якоря электромагнитного механизма/ содержащее силовую и управляющую части. Силовая часть включает рабочие катушки силовых электромагнитов и перемещакадийся возвратно-поступательно якорь. Управляющая часть устройства содержит вспомогательный источник высокочастотных импульсов, ключи, логический элемент и датчик тока в виде шунта на резисторе. Устройство предназначено для контроля положения якоря в процессе работы механизма. Б катушки электромагнитов попеременно по10дают импульсы тока, создающие импульсы электромагнитных сил,-под действием которых перемещается якорь. Для контроля положения якоря во включенную катушку подают импульсы от допол15нительного высокочастотного источника и контролируют токи высокой частоты в этой катушке, амплитуды которых обратно-пропорциональны индуктивности катушки, меняющейся при перемеще20нии якоря. Такое решение требует дополнительного источника, что усложняет устройство и снижает его функциональные возможности123.
25
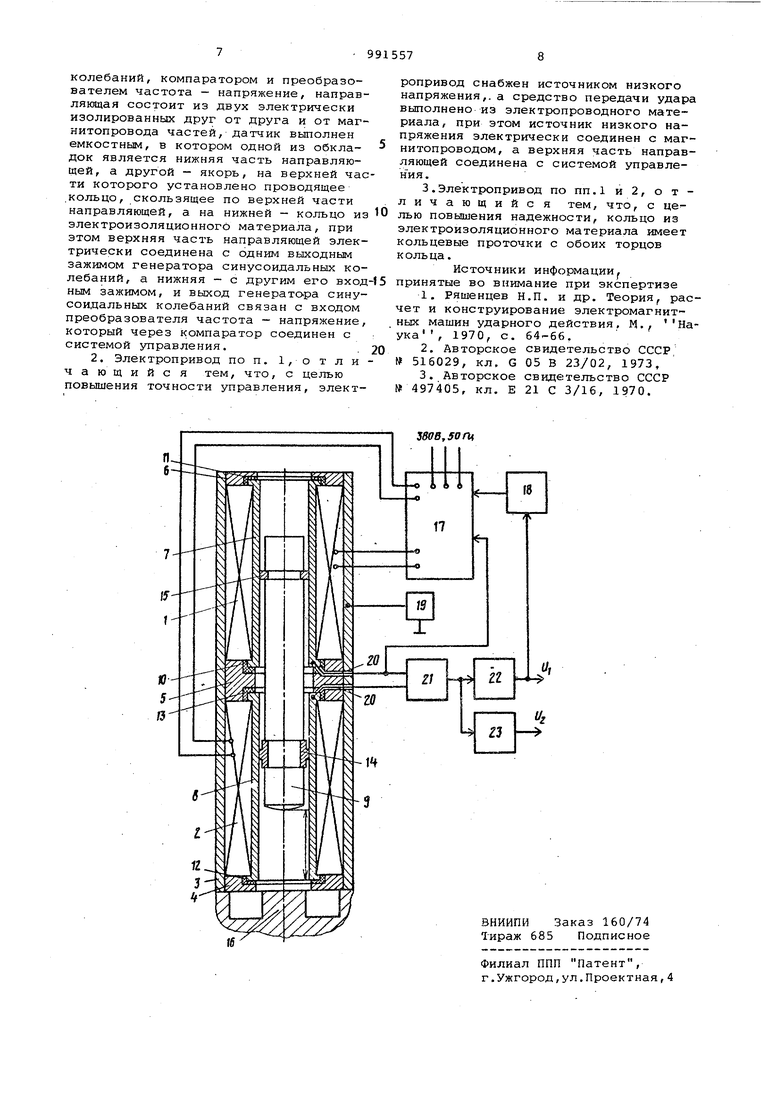
Кроме того, согласно способу изменения производится дополнительный нагрев обмоточного провода и магнитопровода катушки токами высокой частоты, что снижает энергетические пара30 метры электромагнитного двигателя. Наиболее близким к изобретению яв ляется электропривод, содержащий сис тему управления и электромагнитный двигатель возвратно-поступательного движения, включающий магнитопровод с катушками прямого и обратного хода, якорь, установленный в направляющих, ,цатчик положения и средство передач ,удара, контактирующее с магнитопрово дом и якорем в его конечном положении 3 . Недостаток устройства состоит в том, что усложняется конструкция эле тромагнитного двигателя за счет допо нительных измерительных катудаек. Кро ме того, информация о положении якоря поступает только в дискретные моменты времени, что не позволяет реги стрировать весь процесс движения яко ря и затрудняет автоматическое регулирование работы электромагнитного двигателя возвратно-поступательного движения. Все это снижает эффективность работы машины. Целью изобретения является повыше ние точности и эффективности работы. Эта цель достигается тем, что эле ктропривод снабжен генератором синусоидальных колебаний, компаратором и преобразователем частота - напряжение, направляющая, в которой установ лен якорь, состоит из двух электрически изолированных друг от друга и от магнитопровода частей, датчик положения якоря выполнен емкостным, в котором одной из обкладок является нижняя часть направляющей, а другой якорь, на верхнейчасти которого установлено проводящее кольцо, скользя щее по верхней части направляющей, а на нижней - кольцо из электроизоляционного материала, при этом верхняя часть направляющей электрически соеди нена с одним выходным зажимом генера тора синусоидальных колебаний, а ниж няя - с другим его входным зажимом, выход генератора синусоидальных коле баний связан со входом преобразователя частота - напряжение, который через компаратор соединен с системой управления. Кроме того, для повышения точное ти управления электропривод может быть снабжен источником низкого напряжения, а средство передачи удара выполнено из электропроводного материала, при этом источник низкого напряжения электрически соединен с магниФопроводом, а верхняя часть направляющей соединена с системой управления. При этом с целью повышения надежности в электроприводе электроизоляционное кольцо якоря может иметь коль цевые проточки с обоих торцов кольца На чертеже изображен электропривод. Электропривод состоит из электромагнитных катушек обратного 1 и прямого 2 ходов, заключенных в -ферромагнитный магнитопровод 3 с полюсами 4-6. Во внутренней полости катушек по направляющей, состоящей из двух частей 7 и 8, выполненных из немагнитного электроподводящего материала, перемещается ферромагнитный якорь 9. Часть 7 награвляющей расположена в плоскости катушки 1 и закреплена в полюсах 5 и б через специальные кольцевые диэлектрические прокладки 10 и 11, которые обеспечивают электрическую изоляцию направляквдей 7 от полюсов и «корпуса двигателя. Направляющая 8 расположена в полости катушки 2 и закреплена в полюсах 4 и 5 через диэлектрические прокладки 12 и 13, которые обеспечивают ей электрическую изоляцию от полюсов и корпуса двигателя. Таким образом, направлякадие 7 и 8 и золированы и друг от друга. Якорь 9 имеет подшипники скольжения в виде колец 14 и 15, каждое из которых движется в своей направляющей. Кольцо 14 перемещается в направляквдей 8, оно выполнено из диэлектрического материала, обладающего мальм коэффициентом трения по материалу направляющей, например из фторопласта, в случае стальной направляющей. За счет этого обеспечивается электрическая изоляция якоря 9 от направляющей 8. Кольцо 14 выполнено ступенчатое, т.е. имеет с обоих торцов кольцевые проточки, причем меньшая ступень обращена в сторону направляющей, а большая - в сторону якоря. Это предотвращает электрическое соединение якоря 9 с направляющей 8 железной стружкой, которая может образовываться при длительной работе двигателя. Кольцо 15 перемещается в направляющей 7; оно выполнено из электропроводящего материала с малым коэффициен-. том трения по материалу направлякицей, например из бронзы, в случае стальной направляющей. За счет этого обеспечивается электрический контакт между направляющей 7 и якорем 9. Средство передачи энергии удара якоря 16 электрически связано с корпусом, и в данном случае является инструментом, но оно также может быть буфером или ограничителем. Питание катушек электромагнитного молота производится от тиристорного преобразователя 17, на вход которого подается трехфазное напряжение сети переменного тока 380 В, 50 Гц.. Управление работой электромагнитного молота производится от компаратора 18 и дополнительного блока 19 низкого напряжения, присоелиненногО к корпусу молота.В полосе 5 и диэлектрических прокладках 10 и 13 есть каналы 20, через которые выводятся проводники, соединенные с направляющими 7 и 8, которые идут на вход блока 21 являющегося генератором колебаний, с частотой f, которая может меняться. С ВБкода генератора 21 сигнал поступает на вход блока 22, который является преобразователем частота -напряжение и формирует напряжение U. , пропорциональное частоте и f. Сигнал с выхода генератора 21 подается на вход блока 23, который осуществляет операцию дифференцирования частоты и формирует напряжение U2 poпopциoнaльнoe производной от часu,,)f. Кроме этого, направляющая 7 присое динена ко входу тиристорного преобра зователя 17.. Привод работает следугацим образом Поверхность якоря 9 и направляющая 8, изолированные друг от друга,, образуют цилиндрический конденсатор, емкость которого равна г- о (. С- (-. (to. L-H-O J, где R, - радиус направлянвдей; R - радиус якоря; oL)- - длина катушки; - ход якоря (фиг. 1) . Обозначим Rd С-Ии(-КсГ. Откуда следует, что емкость С пропор циональная ходу якоря Обкладки конденсатора, образованного направляквдей 8 и поверхностью якоря, вьшодяхся на блок 21 через от верстия 20 в полюсе 5. Причем контак с якорем 9 устанавливается через бро зовое кольцо 15 и направляющую 7. Блок 21 является генератором коле баний, в котором емкость С, образова ная поверхностью направляющей и якоря, является задающей. В связи с эти на выходе генератора 21 формируется сигнал, частота которого f пропорцио нальна перемещению якоря о : псГ , С выхода генератора 21 напряжение поступает на блок 22, преобразуиций частоту входного сигнала в величину напряжения на выходе. Таким образьм, на выходе блока 22 формируется напря жение и, пропорциональное ходу якоря. Напряжение с выхода генератора 21 также подается на блок 23, производящей операцию дифференцирования частоты генератора U.j(d dt)f. Поскольку fsef , ° U(dldt), следовательно, напряжение Ол пропорционально скорости движения якоря. Напряжения U и 5, пропорциональные соответственно перемещению якоря сГ и его скорости V, могут быть использованы в качестве сигналов обратной связи в системах регулирования и управления. Например, управление работой электромагнитного -молота может производится следующим образом. Пусть будет включена катушка 1 холостого хода, и якорь 9 под действием ее электромагнитных сил движется вверх. Напряжение U , пропорциональное ходу якоря, поступает с выхода блока 22 на вход компаратора 18, в котором при определенном значении напряжения и (при определенном положении якоря) вырабатывается импульс, поступающий на вход тиристорного преобразователя 17. В результате этого происходит отключение катушки 1 обратного хода и включение катушки 2 прямого хода. Якорь 9 тормозится и движется вниз. В момент удара якоря по инструменту напряжение с источника 19 поступает на вход тиристорного преобразователя 17 по цепи: блок 19 - корпус двигателя 3 - инструмент 16 - боек 9 - кольцо. 15 - направлякяцая 7 - вход блока 17, в результате чего происходит вклкяение катушки 1 обратного хода и выключение катушки 2 прямого хода. Якорь движется вверх, отрывается от инстру мента, тем самьм, прекращая подачу напряжения источника 19 на вход тиристорного преобразователя 17, цикл повторяеГгся. Изобретение позволит точно фиксировать момент удара и соответственно точно определять момент переключения обмоток, т.е. повышает точность управления двигателем. Формула изобретения 1. Электропривод, содержащий систему управления и электромагнитный двигатель йозвратно-поступательного движения, включающий магнитопровод с катушками прямого и обратного хода, якорь, установленный в направляющих, датчик положения и средство передачи удара, контактирующее с магнитопроводом и якорем в его конечном положении, отличающийся тем, что, с целью повышения точности и эффективности работы, электропривод снабжен генератором синусоидальных
