.Изобретение относится к электротехнике и предназначено для использования при реализации эталонных средств измерения силы тока и магнитной индукции.
Целью изобретения является упрощение устройства и повьпиение точности воспроизведения заданных значений постоянного тока.
На чертеже представлена функциональная схема устройства для получения заданных значений постоянного тока.
Устройство содержит регулируемый источник 1 тока, первую 2 и вторую 3 идентичные катушки магнитной индукци с векторами индукции, направленными соответственно встречно и согласно по отношению к вектору индукции внешнего магнитного поля, первый 4 и второй 5 идентичные квантовые магнито- чувствительные датчики, размещенные внутри катушек 2 и 3 магнитной индукции, опорный 6 и управляемый 7 генераторы, смеситель 8, фильтры 9 и 10 соответственно разностной и суммарно частот, первый 11 и второй 12 узкополосные усилители, первьш 13 и второй 14 синхронные детекторы, генератор 15 модуляции и суммирующий усилитель 16, Регулируемый источник 1 тока имеет нагрузку 17. Катутпки 2 и 3 магнитной индукции включены встречно-последовательно в выходную цепь регулируемого источника 1 тока. Узкополосный усипитель 11, синхронный детектор 13 и управляемый генератор 7 подключены последовательно к выходу магниточувствительного датчика 4, Вход узкополосного усилителя 12 соединен с выходом магниточувствительного датчика 5. Выход генератора 15 модуляции подключен к соответствующим входам синхронного детектора 13 и управляемого генератора 7, Входы смесителя 8 соединены с выходами управляемого 7 и опорного 6 генераторов, а выходы через фильтры 9 и 10 разностной и суммарной частот соответственно - с входами магниточув- ствительных датчиков 4 и 5 Входы суммирующего усилителя 16 подключены к выходам узкополосных усилителей 11 и 12, а выход - к одному, из входов синхронного детектора 14, другой вхо которого соединен с выходом генератора 15 модуляции, а выход с управляющим входом регулируемого источни
5
0
5
0
5
0
ка 1 тока. Совокупность блоков 4, 6, 7-9, 11, 13 и 15 представляет собой преобразователь магнитной индукции в частоту.
Регулируемый источник 1 тока служит Д.ЛЯ. питания катушек 2 и 3 магнит- Ной индукции. Благодаря идентичности катушек 2 и 3 и встречно-последовательному их включению ток создает внутри рабочих объемов этих катушек два одинаковых по модулю и противоположно направленных магнитных поля, модуль индукции В| которых определяется в соответствии с формулой
БК KI,
где К - коэффициент преобразования тока в магнитную индукцию, определяемый геометрическими размерами катушек 2 и 3 и . числом ВИТКОВ; I - величина тока, протекающего
через катушки 2 и 3. Магнитные поля, векторно складываясь с внешним полем помехи В, создают в рабочих объемах катушек 2 и. 3 результирующие поля, значения магнитных индукций которых при условии, .
равны соответственно и В|, (здесь можно пренебречь влиянием перпендикулярной составляющей вектора индукции внешнего магнитного поля В„, которая может быть сделана достаточно малой соответствующим расположением катушек 2 и 3 в пространстве).
Частоты магнитного резонанса атомов, являющихся рабочим веществом магниточувствительных датчиков 4 и 5, равны
-. .
ог + Вп), где у
j j
что в 7 В„,
Вк-в„
-,,, (Вк - BJ;
ог п- гиромагнитное отношение атомов;
5
0
5
ij.,
01
U)
01
частота магнитного резонанса
атомов в датчике 4
частота магнитного резонанса
атомов в датчике 5. При воздействии на магниточувстви- тельные датчики 4 и 5, помещенные внутрь катушек 2 и 3 магнитной индукции, создающих поля с индукцией иВц+В,, 1астотномодули- рованных напряжений с частотами несущей из.,и1д., и и выходах датчиков 4 и 5 появляются напряжения на частоте модуляции, амплитуды и фазы которых зависят от величины и знака расстройки
3,1328801
du)i cu, o 4w, 2 Wo2 . ту же фазу, что и напряжетие на выПри нулевой расстройке амплитуда ходе узкополосного усилителя 12, то сигнала равна нулю. Напряжение с час- при изменении значения В фазы этих тотами о) и 10 формируется в сме- g напряжений сдвинуты на 180°. Поэтому сителе 8 из напряжений опорного 6 и в суммирующем усилителе 16 сигналы, управляемого 7 генераторов. Частота обусловленные изменением В, склады- опорного генератора 6 определяет зна- ваются, а сигналы, связанные с изме- чение стабилизируемого тока. Эта час- нением В, вычитаются. тота неизменная для заданного значе-10 В синхронном детекторе 14 из сум- ния тока I. и равна u).. Час- марного низкочастотного напряжения тота управляемого генератора 7 ы формируется постоянное напряжение, изменяется при вариациях магнитного которое подается в управляемый источ- поля. Фильтры 9 и 10 вьщеляют частоты ник 1 тока для поддержан.ия заданного о) у KI,- - значе ния тока I; const.
0)9 Tf -i -Таким образом, для выработки сигкоторые близки к частотам магнитного нала ошибки, управляющего регулируе- резонанса и и w .-мым источником 1 тока, достаточно одС помощью системы автоподстройки, ного преобразователя магнитной индук- включающей в себя узкополосный усили- 20 ции в частоту, причем в предлагаемом тель 11, синхронный детектор 13 и техническом решении требования к нему генератор 15 модуляции, частота уп- существенно снижены. Частота управля- равляемого генератора 7 постоянно емого генератора 7 определяется лишь подстраивается так, чтобы удовлетво- величиной внешнего магнитного поля, рять условию da) О, т.е. 25 а диапазон перестройки - вариациями U),p у (Вfi - В + KIj).этого поля. Коэффициент регулирования
Величина расстройки 4 ы (jOj - u),.,,., системы автоподстройки генератора 7 Ipи этом равна 2-j-(KI; -В,). может быть выбран достаточно малым
Величина расстройки лы не зависит (около 100), поскольку статическая от величины внешнего магнитного поля 30 ошибка преобразователя магнитной ин- помехи, причем, если ток в катушках - дукции в частоту не сказывается на 2 и 3 равен заданному значению , величине стабилизируемого тока за то KI j - В ц О и сигнал на выходе счет сложения низкочастотных сигна- датчика 5 отсутствует.лов, связанных с этой ошибкой, в сумПри отклонении тока I от заданного зь мирующем усилителе 1.6. Все это упро- Значения I, du) О и на выходе датчи- щает устройство для получения задан- ка 5 возникает напряжение на чдстоте ных значений постоянного тока в демодуляции. Это напряжение усиливается лом и позволяет повысить точность узкополосным усилителем 12 и подает- воспроизведения и стабилизации пос- ся на один из входов суммирующего 40 тоянного тока.
усилителя 16. На другой вход суммиру- Устройство работает следующим об- ющего усилителя 16 подается сигнал с разом.
выхода узкополосного усилителя 11. Значение тока из ряда (i Напряжение на выходе усилителя 11, 1, 2, 3, ..., и) заданных значений входящего в состав системы автопод- 45 предварительно устанавливают грубо стройки частоты, должно поддерживать- на регулируемом источнике 1 тока. Ча- ся равным нулю системой автоподстрой- стота опорного генератора 6 при этом ки. Реально на выходе усилителя 11 устанавливается равной (0., jKIj. имеется остаточное напряжение, обус- Частота управляеьюго генератора 7 лсвленное статической ошибкой системы 50 выбирается близкой к частоте автоподстройки. Для исключения влия- магнитного ,резонанса атомов рабочего ния статической ошибки следящей сие- вещества во внешнем магнитном поле, темы на точность воспроизведения и При этом частоты to, ш - и)|г и стабилизации тока это напряжение не- г образуемые в смеси- обходимо учитывать. Причем, если ос- 55 теле 8 и выдeляe гьIe фильтрами 9 и 10, таточное напряжение на выходе узко- сказываются близкими.к частотам маг- полосного усилителя 11, обусловленное нитного резонанса для атомов в маг- изменением тока в катушках 2 и 3 и, ниточувствительных датчиках 4 и 5, следовательно, изменением В,, имеет размещенных в катушках 2 и 3 магнитной индукции. При модуляции частоты WVT управляемого генератора 7 с низкой частотой Л , определяемой генератором 15 модуляции, на выходах датчиков 4 и 5 появляются низкочастотные сигналы с частотой модуляции. Эти сигналы усиливаются с помощью узкополосных усилителей 11 и 12 и складываются в суммирующем усилителе 16, Сигнал с узкополосного усилителя 11 поступает, кроме того на синхронный детектор 13, где преобразуется в постоянное напряжение, служащее для управления частотой управляемого генератора 7. Таким образом, частота уп- t5 выделить из полного поля только ту равляемого генератора 7 изменяется его часть, которая обусловлена током, в соответствии с изменением внешнего протекающим через катушку магнитной магнитного поля. Сигнал с выхода сум- индукции, и стабилизировать именно мирУющего усилителя 16 поступает на это поле. Полное поле, воздействующее синхронный детектор 14, где преобра- 20 на магниточувствительный датчик, при
этом может изменяться за счет вариаций внешнего магнитного поля.
Таким образом, изобретение позволяет уменьшить число замкнутых следязуется в постоянное напряжениеj служащее для управления регулируемым источником 1 тока и, как следствие; для стабилизации тока I.
В известном устройстве напряжение 25 щих систем, снизить требования к их
для управления регулируемьзм источником 1 тока формируется и з высокочастотных; сигналов, частоты которых несут информацию об абсол отном зна че нии и изменениях магнит1Ю-го ПОЛЕ в катушках 2 и 3. Такой г рницип требует создания трех замкнутых следящих систем - цепи стабилизации тока и внутри нее двух следящих систем
в преобразователях .магнитной инд 5 к- ции в частоту. При этом высокие требования к стабильности и воспроизводимости тока накладывают жесткие требования на следящие системы преобразователей.
В предлагаемом устройстве напряжение для управления регулируемьм источником 1 тока форми руется из низкочастотных сигналов на частоте .модх
ляции, амплитуда и фаза которьгх несет 45 магнитного поля, первьй и второй
информацию об изменениях магнитного поля в катушках 2 и 3,, При этот-i оказывается возможным сократить число следящих систем до дв у-х и резко снизить требования к управляемому г еке- 50 первый с;икхронньй детектор и управля- ратору 7 и системе автоподстройки емьм генератор,, подключенные после- его частоты в преобразователе магнит- дователъно к выходу первого магнито- ной индукции в частоту. Так как частота управляемого генератора 7 примерно на порядок меньше частоть опор- 55 соединен с выходом второго магнито- ного генератора 6, во столько же раз чувствительного датчика, генератор .снижаются требования к стз.бильности модуляции, выхо.д которого подключен частоты управляемого генератора 7, к соответствующим входам первого син- Кроме того, коэффицие:нт регулировг.- хропно о детектора и управляемого
идентичные квантовые магниточувстви- тельные датчики, размещенные внутри одноименных катушек магнитной индук- циИз первый узкополосный усилитель.
чувствительного датчика, второй узкополосный усилитель, вход которого
НИН в петле автоподстройки его частоты может быть выбран достаточно низким, поскольку остаточное напряжение на выходе узкополосного усилителя 11, связанное со статической ошибкой системы автоподстройки, учитывается в суммирующем усилителе 16 и не влияет в дальнейшем на величину тока в катушках 2 и 3.
Если в известных устройствах аналогичного назначения у.меет место стабилизация полного поля, воздействующего на магниточувствительньш датчик, то предлагаемое устройство позволяет
параметрам и, следовательно, упрос-, тить конструкцию устройства для получения заданных значений постоянного ToKai Кроме трго, исключаются погрещ- ности воспроизведения и стабилизации тока, связанные со статической ошибкой преобразователей магнитной индукции в частоту.
Формула
изобретения Устройство для получения заданных значений постоянного тока, содержащее регулируемый источник тока, з вьпсод- тлую цепь которого включены встречно- последовательно первая и вторая идентичные катушки магнитной индукции Ъ векторами индукции, направленными соответственно встречно и согласно по отношению к вектору индукцго внешнего
первый с;икхронньй детектор и управля- емьм генератор,, подключенные после- дователъно к выходу первого магнито- соединен с выходом второго магнито- чувствительного датчика, генератор модуляции, выхо.д которого подключен к соответствующим входам первого син- хропно о детектора и управляемого
идентичные квантовые магниточувстви- тельные датчики, размещенные внутри одноименных катушек магнитной индук- циИз первый узкополосный усилитель.
первый с;икхронньй детектор и управля- емьм генератор,, подключенные после- дователъно к выходу первого магнито- соединен с выходом второго магнито- чувствительного датчика, генератор модуляции, выхо.д которого подключен к соответствующим входам первого син- хропно о детектора и управляемого
чувствительного датчика, второй узкополосный усилитель, вход которого
7.13288018
генератора, второй синхронный детек- разностной и суммарной частот соот- тор, опорный генератор, о т л и ч а- ветственно - с входами первого и вто ю щ е е с я тем, что, с целью упро- рого магниточувс вительных датчиков, щения устройств а и повьшения точности входы суммирующего усилителя подклю- воспроизведения заданных значений - чены к выходам узкополосных усилите- постоянного тока, в него введены сме- лей, а выход к одному из входов вто- |СИтель, фильтры разностной и суммар- рого синхронного детектора, другой ной частот и суммирующий усилитель, вход которого соединен с выходом ге- причем входы смесителя соединены с Q нератора модуляции, а выход с управ- выходами управляемого и опорного ге- ляющим входом регулируемого источника нераторов, а выходы через фильтры тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТР | 1992 |
|
RU2087920C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА И ЛЕГКИХ | 2002 |
|
RU2236169C2 |
| СПЕКТРСЛ1ЕТР .АКУСТИЧЕСКОГО ЯДЕРНОГО Л1\ГНИТНОГО | 1973 |
|
SU381018A1 |
| ТРЕХКОМПОНЕНТНЫЙ ОПТИЧЕСКИЙ КВАНТОВЫЙ МАГНИТОМЕТР НА АЗОТНО-ВАКАНСИОННЫХ ЦЕНТРАХ ОКРАСКИ В КРИСТАЛЛЕ АЛМАЗА | 2024 |
|
RU2835005C1 |
| МАГНИТОМЕТР | 2000 |
|
RU2202805C2 |
| ВИБРАЦИОННЫЙ МАГНИТОМЕТР | 2007 |
|
RU2341810C1 |
| ВИБРАЦИОННЫЙ МАГНИТОМЕТР | 2004 |
|
RU2279689C2 |
| Устройство для создания стабильного магнитного поля заданной напряженности | 1983 |
|
SU1151939A1 |
| Магнитометр | 1979 |
|
SU813343A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2434291C1 |
Изобретение относится к электротехнике, в частности к эталонным источникам тока. Цель изобретения - упрощение конструкции устройства и повышение точности воспроизведения заданных значений постоянного тока. В устройстве для управления регулируемым источником 1 тока использованы лишь две следящие системы, одна из которых, а именно блоки 4,6,7-9,11., 13 и 15, представляют собой преобраff зователь магнитной индукции в частоту. В данном случае из полного поля, воздействующего на магниточув- ствительный датчик, вьщеляется только его часть, обусловленная током, протекающим через соответствующую катушку магнитной индукции, и стабилизируется именно это поле. Напряжение для управления регулируемым источником 1 тока формируется из низкочас- TOTHbix сигналов на частоте модуляции генератора 15, .амплитуда и фаза которых несут информацию об изменениях магнитного поля в катушках 2 и 3. Так как частота управляемого генератора 7 примерно на порядок меньше частоты опорного генератора 6, во столько же раз снижены требования к стабильности частоты генератора 7. Благодаря введению в устройство суммирующего усилителя 16 исключены погрешности воспроизведения тока, связанные со статической ошибкой преобразователей магнитной индукции в частоту. 1 ил. SS, ш со ю Ob СХ)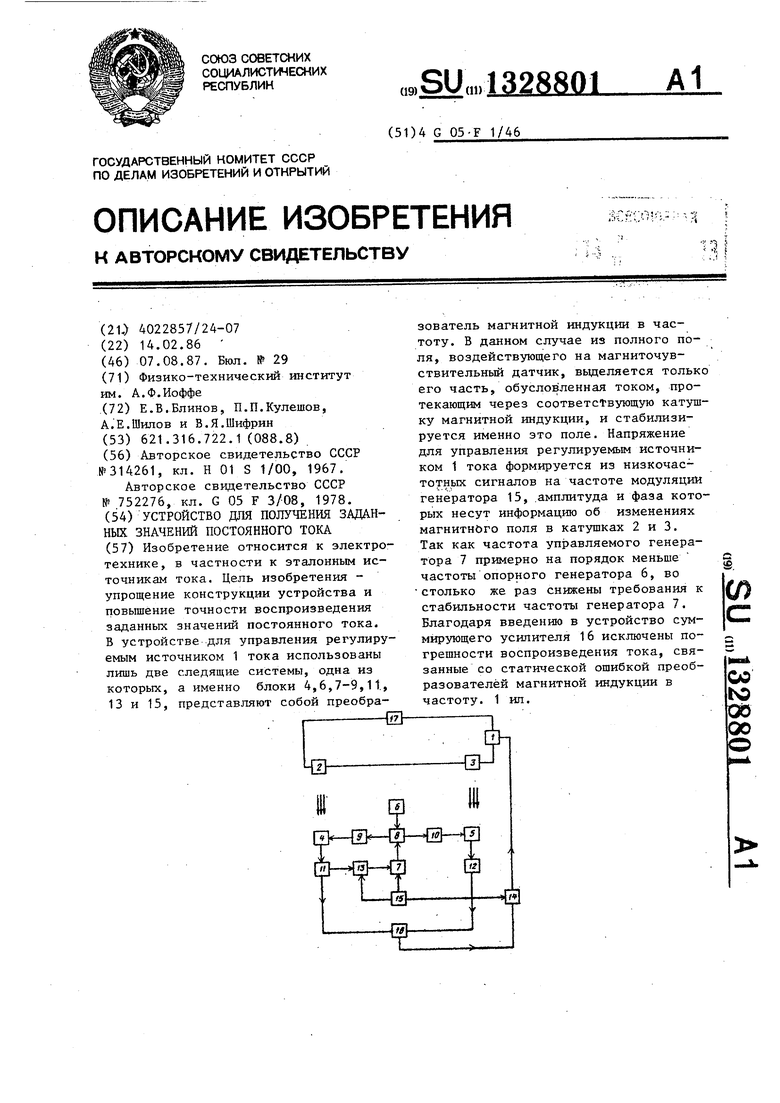
| 0 |
|
SU314261A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для получения заданных значений постоянного тока | 1978 |
|
SU752276A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
