Изобретение относится к сельскому хозяйству, в частности к устройствам для доения.
Цель изобретения - снижение затрат труда при эксплуатации устройства.
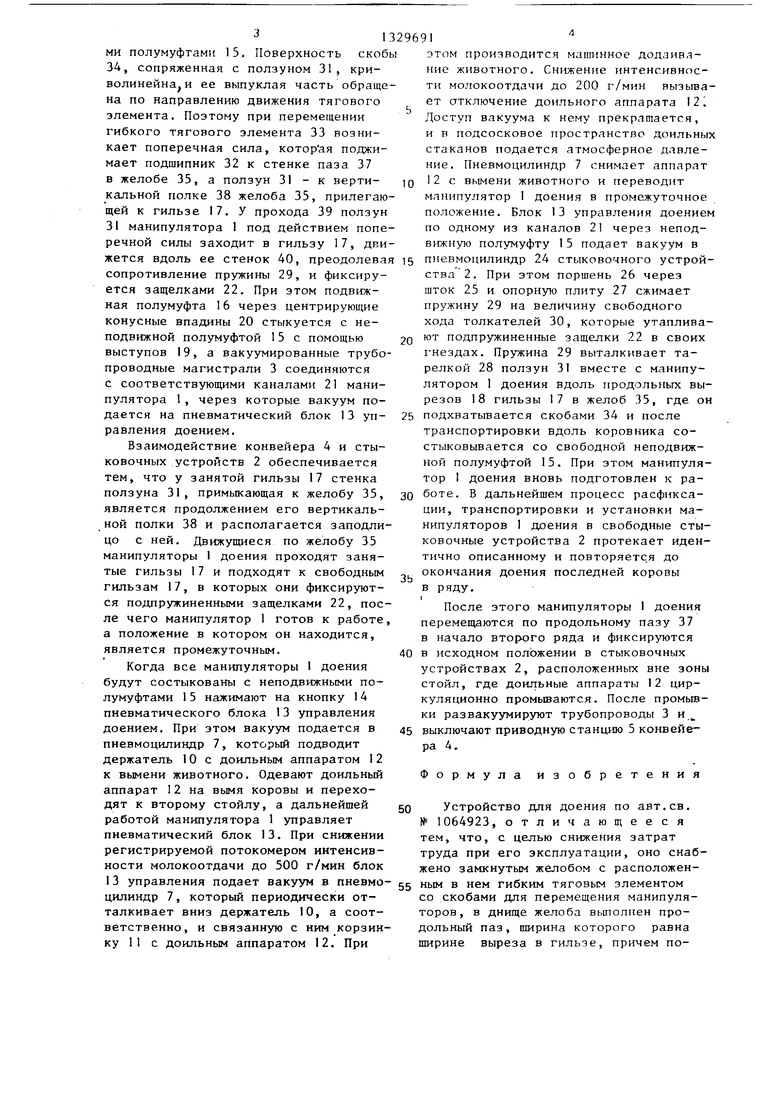
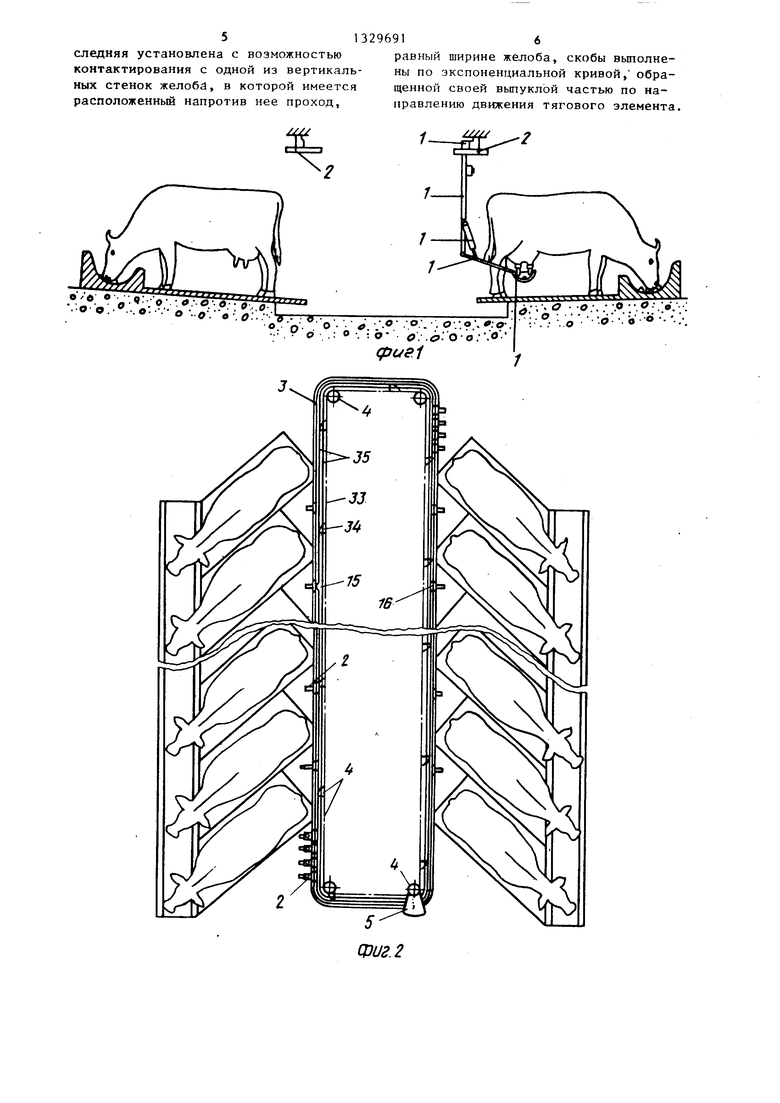
На фиг. 1 схематично изображено устройство для доения, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг.З - манипулятор в рабочем положении; на фиг. 4 - манипулятор, подготовленный к расстыковке; на фиг.З - манипулятор в расстыкованном с вакуумными магистралями положении; на
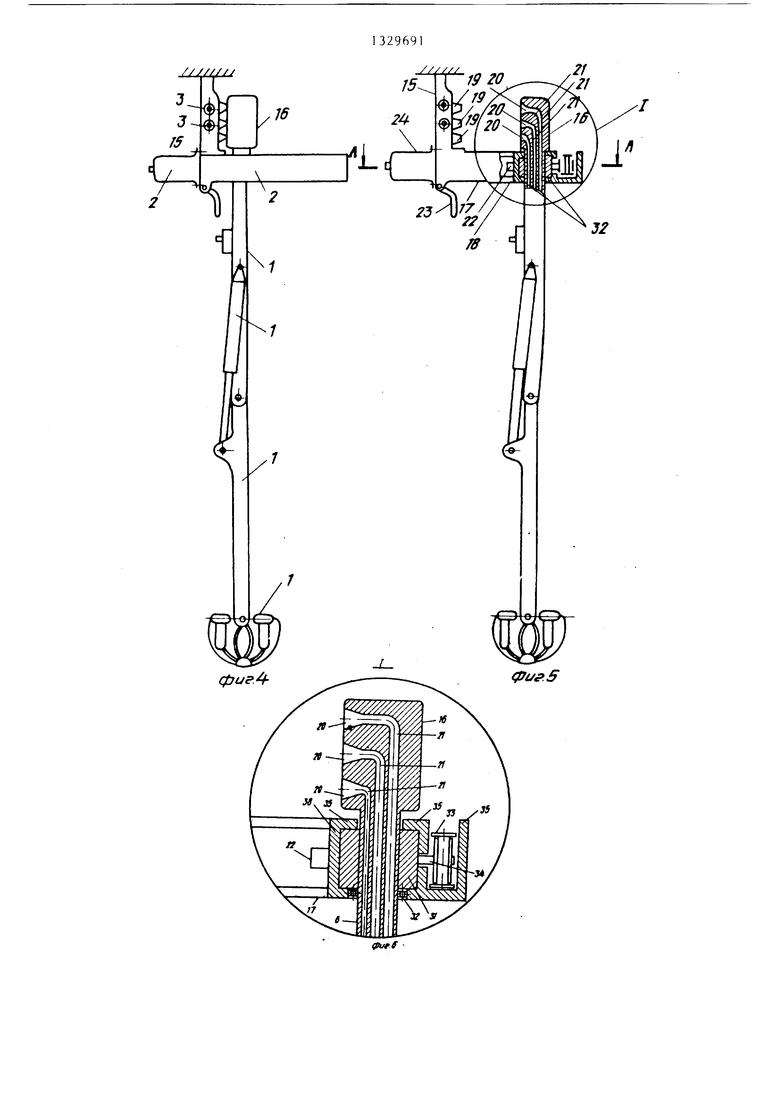
фиг. 6 - узел I на фиг. 3; на фиг.7 - 5 полка 36 которого снабжена про- разрез А-А на фиг. 5; на фиг. 8 - то дольным пазом 37, равным по ширине
вырезу 18 в гильзе 17. В вертикальной полке 38 желоба 33, прилегающей к гильзе 17, напротив гильзы выполнен 2Q проход 39, равный ширине желоба. Скобы 34 гибкого тягового элемента 33 согнуты в горизонтальной плоскости по экспоненциальйой кривой, обращенной своей вьшуклой частью по направМанипулятор 1 доения включает вер- 25 лению движения тягового элемента 35. тикальную штангу 6, соединенную с Продольный паз 37 в горизонтальной
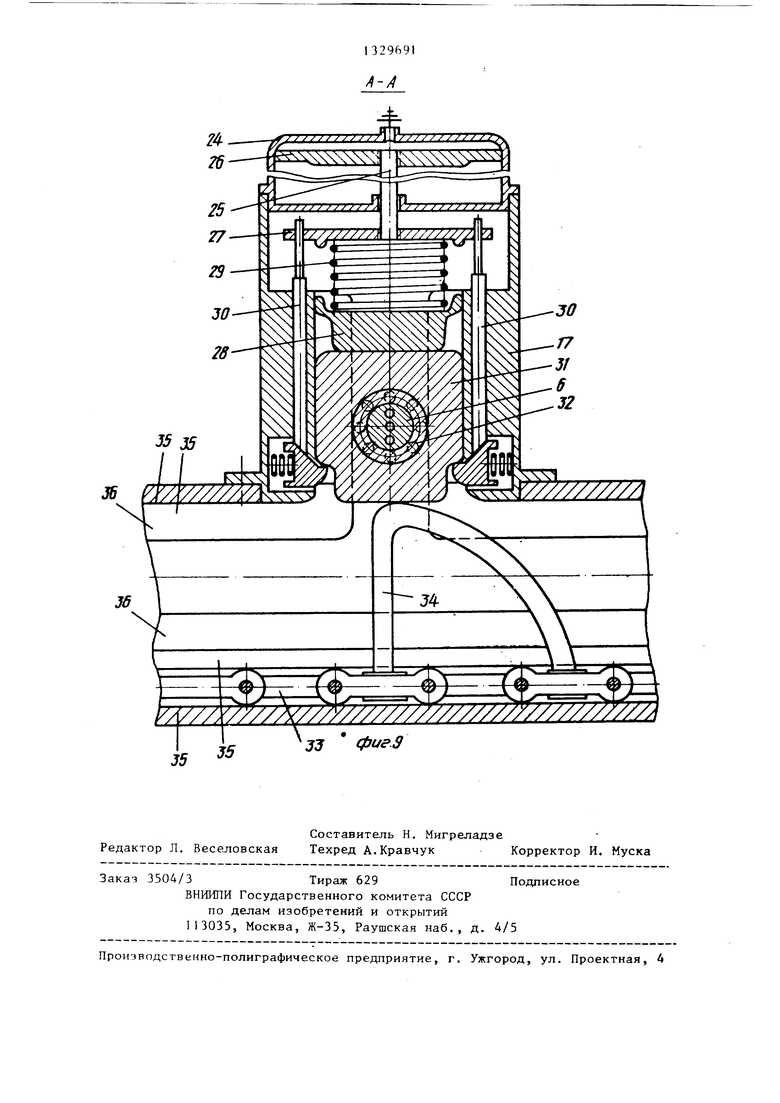
же, манипулятор заходит в гильзу; на фит. 9 - то же, манипулятор состыкован с вакуумными магистралями.
Устройство для доения содержит манипуляторы 1 доения, стыковочные устройства 2, вакуумированные трубопроводные магистрали 3 и горизонтальный конвейер 4 с приводной станцией 5.
помощью пневмоцилиндра 7 и шарниров 8 и 9 с держателем 10, на котором установлена корзинка 11 с доильным аппаратом 12. На штанге 6 закреплен пневматический блок I3 управления доением с кнопкой 14.
Манипуляторы 1 доения соединены со стыковочными устройствами 2, расположенными против каждого стойла на вакуумированных магистралях 3. Стыковочное устройство 2 содержит непод- вижную полумуфту 15 и подвижную полумуфту 16, гильзу 17 с продольными вырезами 18.
Неподвижная полумуфта 15 закреплена на вакуумированных трубопроводных магистралях 3, а подвижная полумуфта 16 установлена на штанге 6. Неподвижная 15 и подвижная 16 полумуфты в местах соединения снабжены обрезинен- ными конусными центрирующими выступами 19 и впадинами 20 с каналами 21. На гильзе 17 установлены подпружинен
ные защелки 22, двуплечий рычаг 23 ручной расфиксации полумуфт 15 и 16, пневмоцилиндр 24, шток 25 которого соединен с поршнем 26 и опорной плитой 27, контактирующей с тарелкой 28 через пружину 29. Двуплечий рычаг 23 ручной расфиксации расположен в продольном вырезе 18 гильзы 17. Плечо рычага 23, размещенное в гильзе 17, выполнено в виде вилки и сопряжено
с опорной плитой 27. Опорная плита 27 сопряжена с толкателями 30, контактирующими с подпружиненными защелками 22. На вертикальной штанге 6 под подвижной полумуфтой 16 установлены ползун 31 и подшипник 32. Гори- зонтальньй конвейер 4 выполнен в виде гибкого тягового элемента 33 с закрепленными на нем скобами 34, уложенными в замкнутом желобе 35, расположенном вдоль стойл коровника. Замкнутый желоб 35 выполнен в виде прямоугольного короба, горизонталь5
Q
полке 36 желоба 33 с вырезом 18 гильзы 17, а также торцы гильзы 17 с ее .внутренними стенками 40 соединены
0 ДРУ другом в местах прохода 39 по радиусу.
Устройство работает следующим образом.
С помощью крана (не показан) соединяют трубопроводные магистрали 3 с источником вакуума и включают в работу приводную станцию 5 конвейера 4, после чего нажимают на рычаг 23 ручной расфиксации наиболее удаленного от животного манипулятора 1 доения. При этом рычаг 23 воздействует через опорную плиту 27 и толкатели 30 на подпружиненные защелки 22 и утапливает их в гнездах. Под действием пружины 20 подвижная полумуфта 16 перемещается по гильзе 17 в желоб 35. Движущимися скобами 34 Конвейера 4 ползун 31 вместе с манипулятором 1 захватывается и перемещается по желобу 35 вдоль коровника.
Как только первый манипулятор 1 доения начинает перемещаться по желобу 35, нажимают на рычаги 23 ручной расфиксации оставшихся манипуляторов
g 1 доения и поочередно выводят их в продольный паз 37 желоба 35, где их ползуны 31 подхватываются скобами 34, перемещаются вдоль коровника и состыковываются со свободными неподвижнь47
5
0
МИ полумуфтами 15. Поверхность скоб 34, сопряженная с ползуном 31, кри- волинейна и ее выпуклая часть обращена по направлению движения тягового элемента. Поэтому при перемещении гибкого тягового элемента 33 возникает поперечная сила, котор ая поджимает подшипник 32 к стенке паза 37 в желобе 35, а ползун 31 - к вертикальной полке 38 желоба 35, прилегающей к гильзе 17. У прохода 39 ползун 31 манипулятора 1 под действием поперечной силы заходит в гильзу 17, движется вдоль ее стенок 40, преодолева сопротивление пружины 29, и фиксируется защелками 22. При этом подвижная полумуфта 16 через центрирующие конусные впадины 20 стыкуется с неподвижной полумуфтой 15 с помощью выступов 19, а вакуумированные трубопроводные магистрали 3 соединяются с соответствующими каналами 21 манипулятора 1, через которые вакуум подается на пневматический блок 13 управления доением.
Взаимодействие конвейера 4 и стыковочных устройств 2 обеспечивается тем, что у занятой гильзы 17 стенка ползуна 31, примыкающая к желобу 35, является продолжением его вертикальной полки 38 и располагается заподлицо с ней. Движущиеся по желобу 35 манипуляторы 1 доения проходят занятые гильзы 17 и подходят к свободным гильзам 17, в которых они фиксируются подпружиненными защелками 22, после чего манипулятор 1 готов к работе а положение в котором он находится, является промежуточным.
Когда все манипуляторы 1 доения будут состыкованы с неподвижными полумуфтами 15 нажимают на кнопку I4 пневматического блока 13 управления доением. При этом вакуум подается в пневмоцилиндр 7, который подводит держатель 10 с доильным аппаратом 12 к вымени животного. Одевают доильный аппарат 12 на вымя коровы и переходят к второму стойлу, а дальнейшей работой манипулятора 1 управляет пневматический блок 13. При снижении регистрируемой потокомером интенсивности молокоотдачи до 500 г/мин блок I3 управления подает вакуум в пневмо цилиндр 7, который периодически отталкивает вниз держатель 10, а соответственно, и связанную с ним корзинку 1 1 с доильньм аппаратом 12. При
0
0
5
этом производится машинное додаивание животного. Снижение интенсивности молокоотдачи до 200 г/мин вызывает отключение доильного аппарата 121 Доступ вакуума к нему прекратается, и в подсосковое пространство доильных стаканов подается атмосферное давление. Пневмоцилиндр 7 снимает аппарат 12 с вымени животного и переводит манипулятор 1 доения в промежуточное положение. Блок 13 управления доением по одному из каналов 21 через неподвижную полумуфту 15 подает вакуум в 5 пневмоцилиндр 24 стыковочного устройства 2. При этом поршень 26 через шток 25 и опорную плиту 27 сжимает пружину 29 на величину свободного хода толкателей 30, которые утапливают подпружиненные защелки 22 в своих гнездах. Пружина 29 выталкивает тарелкой 28 ползун 31 вместе с манипулятором 1 доения вдоль продольных вьг- резов 18 гильзы 17 в желоб 35, где он подхватьшается скобами 34 и после транспортировки вдоль коровника состыковывается со свободной неподвижной полумуфтой 15. При этом манипулятор I доения вновь подготовлен к работе. В дальнейшем процесс расфикса- ции, транспортировки и установки манипуляторов 1 доения в свободные стыковочные устройства 2 протекает идентично описанному и повторяется до окончания доения последней коровы в ряду.
После этого манипуляторы 1 доения перемещаются по продольному пазу 37 в начало вторхрго ряда и фиксируются в исходном положении в стыковочных устройствах 2, расположенных вне зоны стойл, где доильные аппараты 12 цир- куляционно промьшаются. После промьш- ки развакуумируют трубопроводы 3 и 5 выключают приводную станцию 5 конвейера 4,
Формула изобретения
0
Ь
0
50
Устройство для доения по авт.св. № 1064923, отличающееся тем, что, с целью снижения затрат труда при его эксплуатации, оно снабжено замкнутым желобом с расположенным в нем гибким тяговым элементом со скобами для перемещения манипуляторов, в днище желоба выполнен продольный паз, ширина которого равна ширине выреза в гильзе, причем последняя установлена с возможностью контактирования с одной из вертикальных стенок желоба, в которой имеется расположенный напротив нее проход,
равный ширине желоба, скобы вьшолне- ны по экспоненциальной кривой, обращенной своей выпуклой частью по направлению движения тягового элемента.
в
о о:.« ...в:--о-;v- ; : :
,, о. -.0 о. .о.-.;...
. о .: О . : О- О. . - Q- о: .О/
... о -о-.:-о .« . в. ;-. ..o - - o - b - - (pUffI
П1В...,,,.,
У7/777/7/ / / Л//77777 JJJ
фие8
/f
30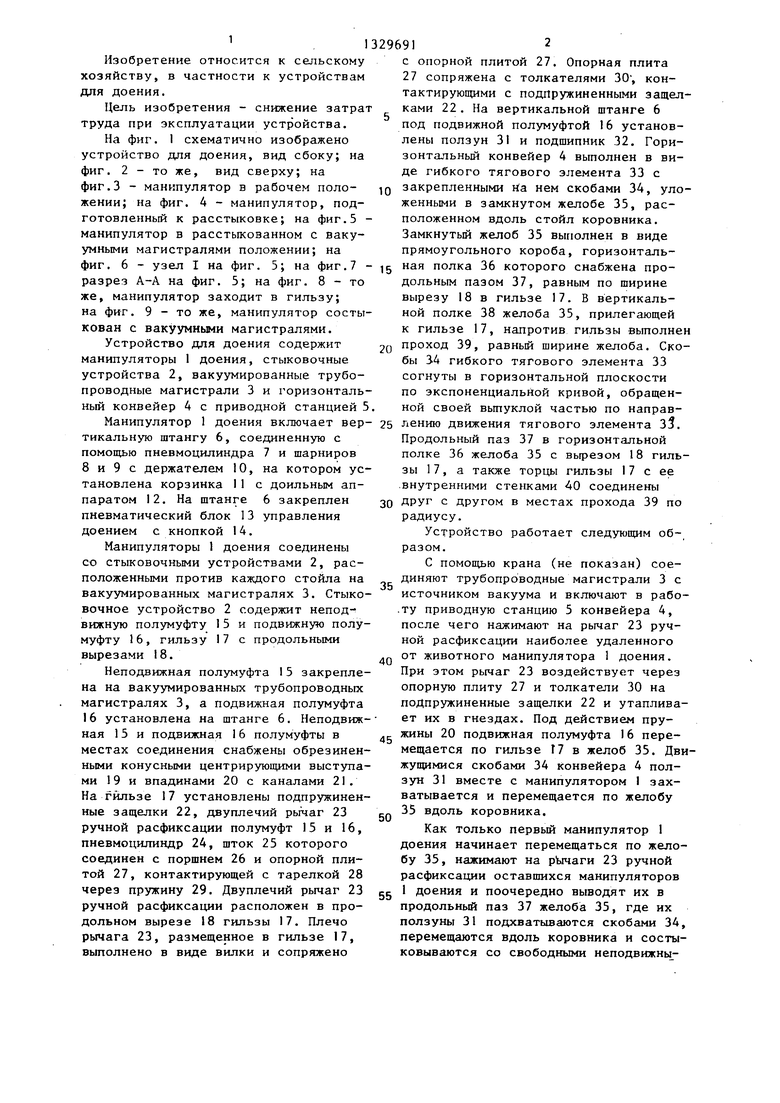
| название | год | авторы | номер документа |
|---|---|---|---|
| Доильная установка | 1987 |
|
SU1443861A1 |
| Устройство для доения | 1982 |
|
SU1064923A1 |
| МАНИПУЛЯТОР ДОЕНИЯ | 1991 |
|
RU2036580C1 |
| УСТАНОВКА ДОИЛЬНАЯ ВЫДВИЖНАЯ | 2002 |
|
RU2234835C1 |
| УСТАНОВКА ДЛЯ КОНВЕЙЕРНОГО ОБСЛУЖИВАНИЯ ЖИВОТНЫХ | 1992 |
|
RU2029464C1 |
| ПЕРЕДВИЖНОЙ ДОИЛЬНЫЙ АГРЕГАТ | 2011 |
|
RU2466533C1 |
| Доильная установка | 1978 |
|
SU698591A1 |
| ПЕРЕДВИЖНОЙ ДОИЛЬНЫЙ АГРЕГАТ | 2013 |
|
RU2538384C1 |
| ДОИЛЬНЫЙ АППАРАТ ВИННИКОВА И.К. | 1995 |
|
RU2084136C1 |
| ПЕРЕДВИЖНОЙ ДОИЛЬНЫЙ АГРЕГАТ | 2001 |
|
RU2226822C2 |

Изобретение относится к сельскому хозяйству. Цель изобретения - снижение затрат труда при эксплуатации устройства. Устройство содержит манипуляторы 1 доения, стыковочные устройства 2, вакуумированные трубопроводные магистрали 3 и горизонтальный конвейер с приводной станцией. В процессе работы посредством конвейера манипуляторы доения подключают сты-. ковочными устройствами 2 к магистрали 3 и осуществляют доение животных. 9 ил. фие.З 1в & (Л Ni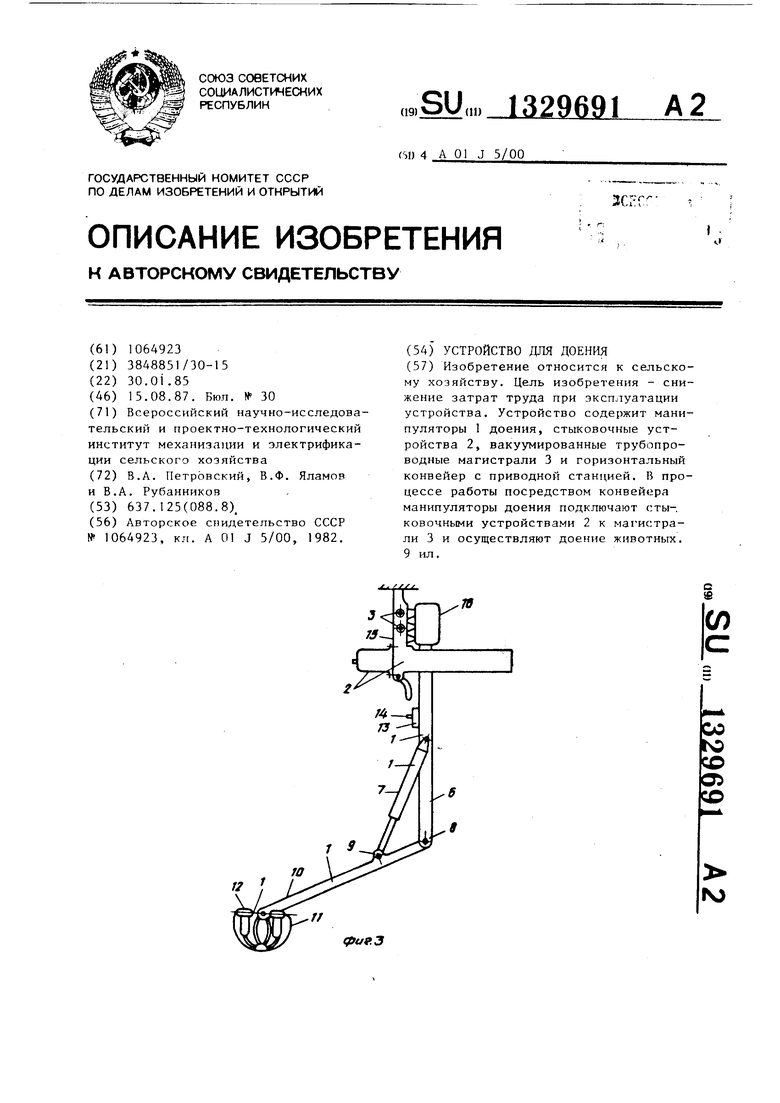
Составитель Н. Мигреладзе Редактор Л, Веселовская Техред А.КравчукКорректор И. Муска
Подписное
Заказ 3504/3Тираж 629
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
-- - - - - - ,--|-r-mj -i..- гц.,. r-.
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
Подписное
| Устройство для доения | 1982 |
|
SU1064923A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
