11
Изобретение относится к прикладно геодезии, в частности к способам создания пространственных ориентирных сетей.
Цель изобретения - повьппение точности взаимного ориентирования путем исключения ошибок за центрировку и редукцию.
На фиг. 1 изображена схема реализации предлагаемого способа; на фиг. система координат, поясняющая передачу элементов ориентирования.
Способ осуществляется следующим образом.
В точках Т , Т, и Т, устанавливают теодолиты, оси вращения которых задают частные системы координат Х., Y, Z,, X,,, Y, Zj и Xj, Yj, Zj.Пуст в этих системах координат возможно определить нормали N, Nj и Ng к зеркалам 3, 3„ м Зд соответственно.
Необходимо определить ориентирование систем координат теодолитов относительно плоскости Т, 1, Т, что может быть выполнено путем определения сферических координат /з и Z ортов векторов Т , , I i Tjj , f,, и Tj, . Для этого ориентируют теодолиты относительно соответствующих зеркал и берут отсчеты по кругам ,.. N. /IN, и . .
Измерения последовательно проводят теодолитом Т , затем теодолитом Т, и наконец теодолитом Tj. Теодолит Т ориентируют коллиматорным спо (строят в про- орта вектора
собом.на теодолит X, странстве направления Т, ) и фиксируют его положение. Ориентируют теодолит Тд способом на теодолит
коллиматорным
Т.
строя.т в
пространстве направление орта вектора Т и фиксируют его положение. Измеряют теодолитом Т углы / и Z, обозначенные на чертеже по обычной методике, при этом в качестве визирных целей используют однозначно заданные в пространстве автоколлимационный блик от 3 и cetKH нитей коллиматоров Т, и
Та. Ориентируют тео- способом на
долит Г коллиматорным зафиксированный ранее коллиматор Tj (трубу теодолита. Т), т.е. строят в пространстве направление орта вектора Т,
гч
и фиксируют положение трубы j k
N Т
.т
Х-| 1 1 Х, Y, Zi
55
sin-jp ду ортами Т, и Т° в
где плоскости
Т, ОТ
(Y,Zj - Z,Yi)i ( X,Z2)j + (X,Yj - }CiY,)k.
786
теодолита Т
5
0
5
. Ориентируют теодолит коллиматорным способом на теодоТ,
Ч
лит т. (строят в пространстве направление орта вектора Tjj; и фиксируют его положение. Измеряют теодолитом TJ соответствующие углы по обычной методике (операция, подобная указанной), ориентируют трубу теодолита TJ по коллиматору Т, контролируют неизменность положения системы координат X,, Y , Z путем повторного измерения направления нормали к зеркалу 3. Сравнивают направления , ZN,, fЬf, Z , fbf Z и углы /3 и Z, и по положению системы координат Х, Y , Z - сферические координаты нормали N, если разности координат больше предлагаемых ошибок, выписывают поправки 1/3 и aZ- как разности. Ориентируют трубу теодолита Т в пространстве путем построения по лимбам соответствующих углов /3 т и ZT , измеренных ранее с. учетом поправок jp и dZ. Измеряют теодолитом Tj соответствуюпще углы по обычной методике.
В результате измерений однозначно определяют координаты коллинеарных
0
5
0
5
0
пар ортов Т
If зг
.т,
гэ
и Т
81
T.j в различных системах координат.
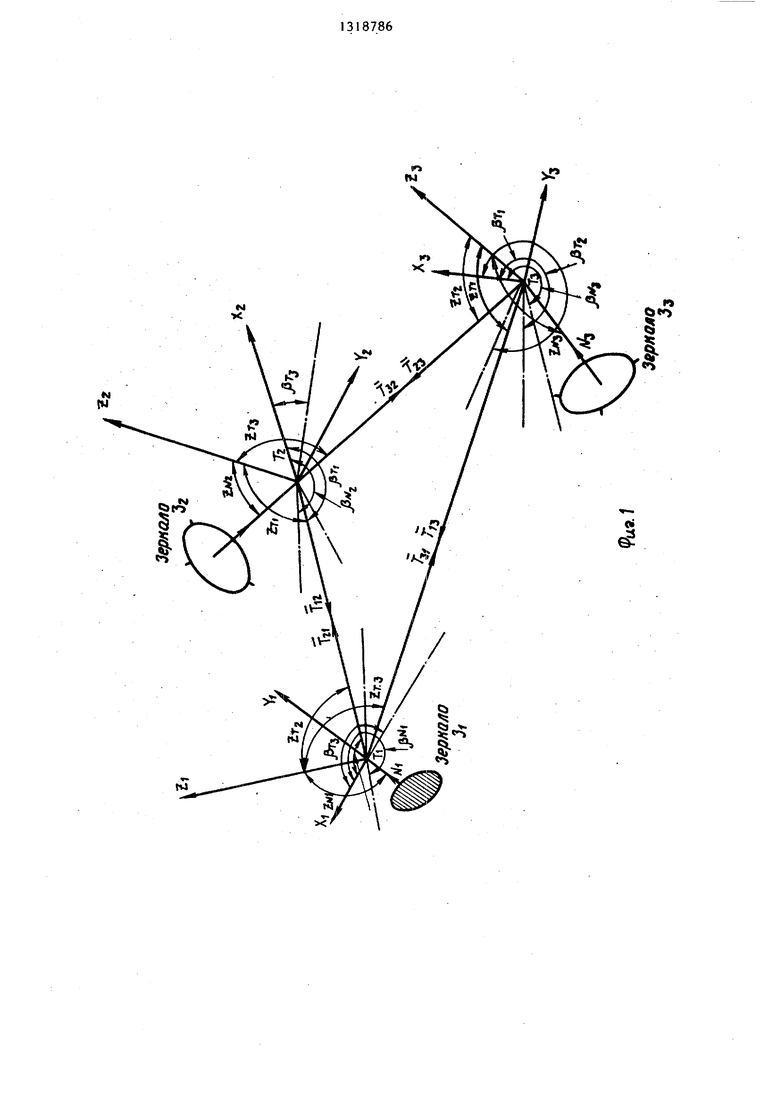
Пусть есть система координат XOYZ, заданная осями вращения теодолита. Плоскость XOY параллельна плоскости лимба, при этом плоскость ZOX совмещена с нулевым диаметром.
Измеряют сферические координаты. направлений на две твердые точки Z Z , /5, , pj .
Координаты ортов векторов Т,, Т, коллинеарных с каждым направлением, определяют соотношениями Х sin Z,sin/j,; sinZj cos ; sinZjSin .
Y,
Z, Xj
Y,.
(1)
г
cosZ
2
Соотношения (1) становятся очевидным при анализе фиг. 2.
Векторное произведение ортов Т
Т
дает координаты вектора, совпаи
дающего с нормалью к плоскости, в
5
которой лежат Т, вектор (Ni
sin-jp ду ортами Т, и Т° в
и Т„. Назовем этот у- угол меж2гдеплоскости
Т, ОТ.
INI координаты которого.
X « - (Y,Z2-ZjY2)8inZ| cosp ; YN - - (Z,,Zj)-sinZ sin/5 ;
Z - - ( - cosZ. (2)
Из уравнений (2) вычисляют сферические координаты направления нормали к плоскости I - ZN и „.
Промежуточной целью является определение направлений на точки Т, и Tjj в системе координат, координатная плоскость которой компланарна с плоскостью (R-системой). Для этого определяют матрицу А линейного преобразования
А1
оху
где Ijj - КООРДИНАТЫ некоторого вектора в R-системе;
1 - координаты того же вектора в XOY-системе.
Для этого делают два поворота системы координат XOY. Поворачивают систему вокруг оси OZ на угол f. После этого ось ОХ совпадет с проекцией нормали N на плоскость XOY.
Соответствующая матрица поворота имеет вид
cos /i -sin ftff О A- sin/s cos л 0 0 0 1 Далее поворачивают систему XOY вокруг оси ОХ до совпадения оси OZ и N, т.е. на угол
О
N -sinZ, N -cosZig
самым искомую матрицу А опре- как произведение
5
с
0
5
0
А
A/i A NДля решения поставленной задачи необходимо проделать действия, указанные для всех трех вершин треугольника. В результате этого все направления, измеренные в частных системах координат, оказываются определенными в единой R-системе координат;
По точности предлагаемый способ позволяет получить в условиях неопределенности положения вектора силы тяжести результаты, соответствующие обычным условиям. .
Формула изобретения
Способ взаимного ориентирования осей вращения трех теодолитов, при котором устанавливают три теодолита, каждый из них наводят на соседние точки, берут отсчеты по обоим кругам и обрабатывают результаты наблюдений в единой системе координат, отличающийся тем, что, с целью повьшения точности взаимного ориентирования путем исключения ошибок за центрировку и редукцию, вблизи каждого теодолита на расстоянии автокол- лимациЬнного визирования жестко закрепляют зеркало, при установке теодолитов их вертикальные оси вращения ориентируют произвольно, после чего каждым из них измеряют автоколлима- ционное направление на соответствующее зеркало и коллимационные направления на визирные оси соседних теодолитов .
Ф(/г.2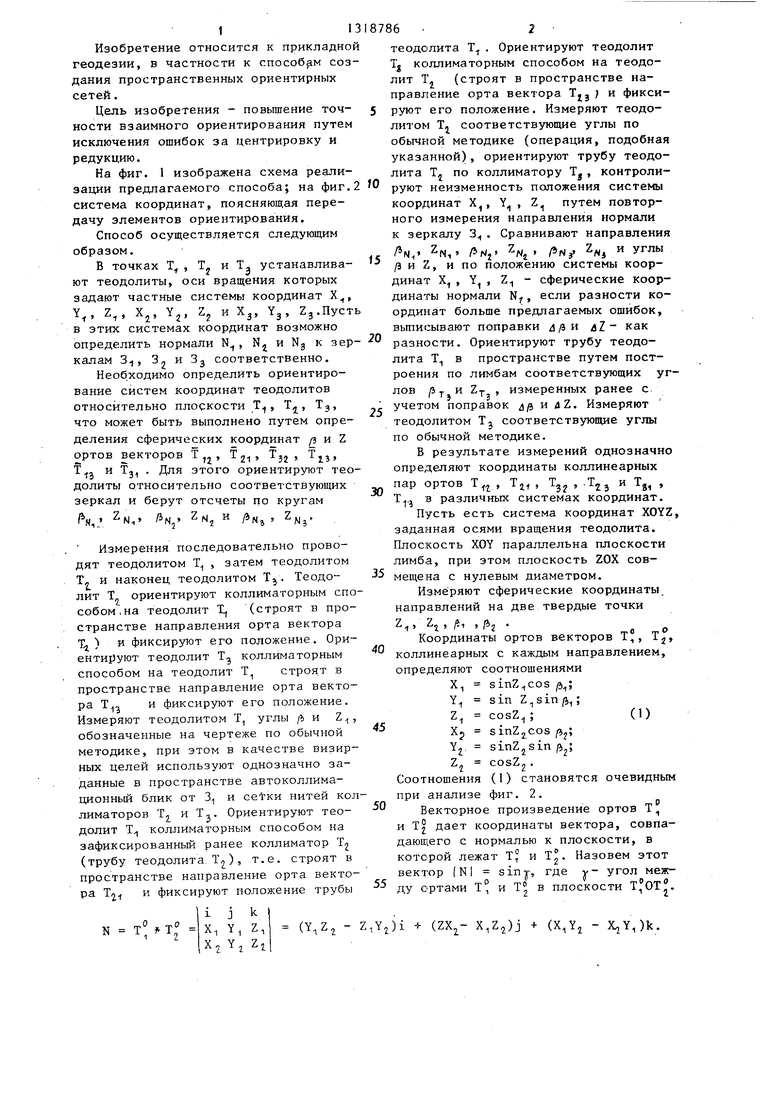


Изобретение относится к прикладной геодезии и позволяет повысить точность взаимного ориентирования путем исключения ошибок за центрировку и редукцию. Устанавливают в определенных точках Т, Т, и Т, три теодолита, ориентируя их вертикальные оси вращения произвольно. На расстоянии автоколлимационного визирования от теодолитов жестко закрепляют зеркала . Измеряют каждым теодолитом автоколлимационное направление на соответствующее зеркало и на визирные оси соседних теодолитов. Все измеренные направления в конечном итоге будут определены в единой R-системе координат. 2 ил. с S (Л 00 00 G
| Еремеев В.Ф., Юркина М.И | |||
| Некоторые вопросы обработки пространственных сетей | |||
| - Труды ЦНИИГАиК, М., 1966, № 171, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Мещанский Ф.Л., Муравьев О.Ф | |||
| Способы точного определения направлений коротких линий | |||
| Вопросы атомной науки и техники, серия Проектирование, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: ЦНИИАтоминформ, 1970. | |||
