ками контроля и подключена ко входу преобразователя высокочастотного сигнала приемника.
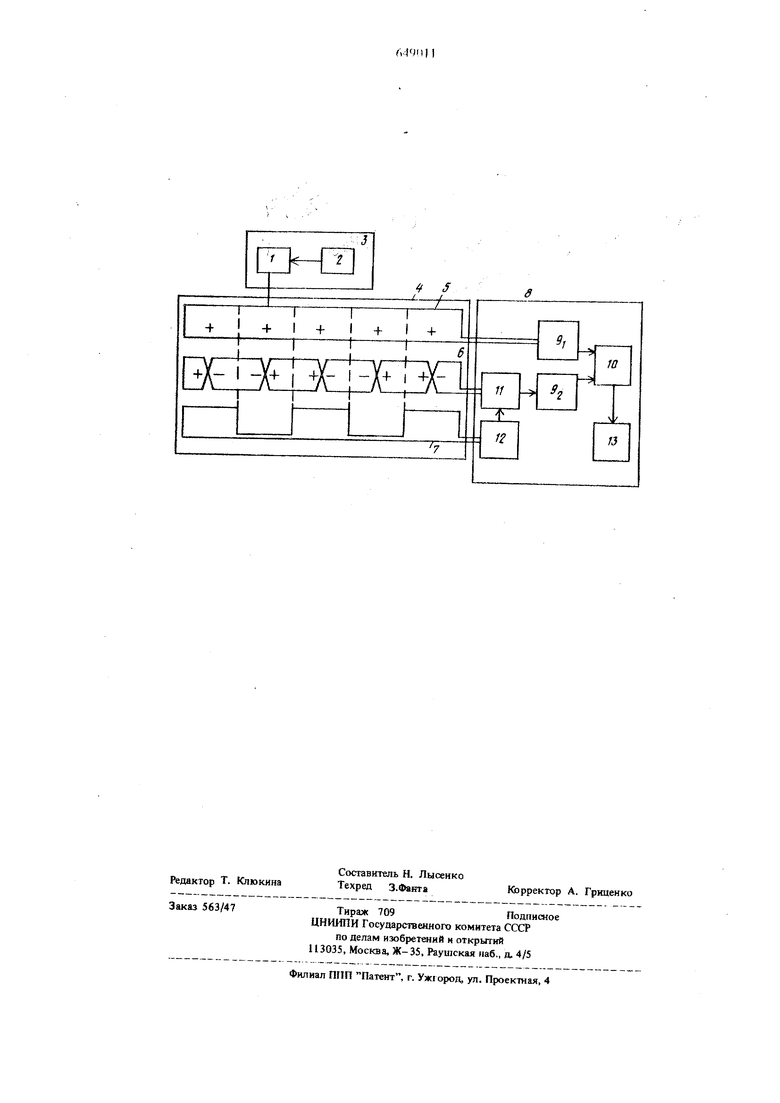
На чертеже дана структурная схема устройства.
Устройство содержит передающую антенну 1, генератор 2 высокой частоты, подвижной механизм 3, приемную антенну 4, первую двухпроводную линию 5 в виде петли, вторую двухпроводную линию 6 с перекрещиваниями в точках контроля, двухпроводную линию 7, приемник 8, резонансные усилители 9i и 9 фазовый детектор 10, коммутатор 11 фазы сигнала, преобразователь 12 высокочастотного сигнала и индикатор 13.
Устройство работает сле.пующим образом.
Передающая антенна 1, перпендикулярная плоскости приег шой антенны 4, наводит ЭДС высокой частоты в ее двухпроводных линиях.
В точках перекрещивания двухпроводной линии 6 при перемещении подвижного механизма 3 вдоль приемной антенны 4 происходит изменение фазы напряжения на 180 . Напряжение второй двухпроводной линии 6 и двухпроводной линии 5 с перекрещиваниями антеьшы 4 усиливается резонансными усилителями 9j и Pj.
Выделенные усрлитети 9i и 92 сигналы подаются для сравнения на фазовый детектор 10. В зависимости от фазы и величины напряжения усилителей 9j и 9г на выходе фазового детектора 10 появляется напряжение соответствующей полярности, пропорциональное отклонению от точкн контроля, которое поступает на индикатор 13,
Для сохранения совпадения полярности напряжения индикатора 13 с направлением движения подвижного механизма на всех участках точного контроля приемную антенну разбивают на участки, посредине которых находится точка точного контроля. При этом сигнал воспринимаемый третьей двухпроводной линией 7 через преобразователь высокочастотного сигнала и коммутатор фазы изменяет на входе одного из резонансных усилителей фазу напряжения на 180 . В результате зтого при перемещении механизма 3 с участка на участок изменение полярности сигнала на индикаторе 13 во всех точках контроля происходит одинаково.
Например, на первом участке в точке контроля при направлении перемещения механизма 3 вперед происходит изменение полярности сигаала фазового детектора 10 с + на -. На втором участке полярность сигнала должна была уже измениться с - на Ч. Однако на границе первого и второго участков контроля происходит
изменение полярности сигнала на 180° при помощи коммутатора фазы 11, управляемого напряжением преобразователя 12, так как в этом случае в двухпроводной линии 7 изменяется
амплитуда сигнала. Вследствие зтого полярность сигнпа фазового детектора 10 и на втором участке в точке контроля изменятся с плюс на минус. Аналогично устройство работает на всех участках в точках контроля.
Таким образом, полярность сигнала фазового детектора 10 всегда однозначно соответствует направлению перемещения механизма 3,
Применение устройства в составе системы дистанционного управления подвижными объектами позволяет повысить ее точность и надежность.
29Формула изобретения
Устройство для контроля положения подвижного механизма, содержащее на подвижном механизме генератор высокой частоты, выход которого соединен с передающей антенной, проложенную вдоль приемную антенну, вьтолненнзто в виде двух параллельно собранных в одном пучке двухпроводных ЛИ1ШЙ, из которых первая выполйена в виде петли, вторая с перекрещиваниями в точках контроля, первая двухпроводная линия приемной антенны подключена к входу первого резонансного усилителя приемника, выходы первого и второго резонансных усилителей приемника соединены с входами фазового детектора приемника, выход которого подключен к индикатору приемника, отличающееся тем, что, с целью повышения точности устройства, в приемник введены преобразователь вьюокочастотного
сигнала и коммутатор фазы сигнала, первый вход которого подключен к выходу преобразователя высокочастотного сигнала, выход соедикен со входом второго резонансного усилителя, в приелй1ую антенну введена третья двухпроводная
линия, разделенная на участии, границы которых расположены посредине межцу двумя соседними точками контроля, и подключена ко входу преобразователя высокочастотного сигаала приемника. Источники информации, принятые во виимание при экспертизе
1.Авторское сввдетельство СССР N 170856, кл. В 61 Z 23/26, 08.08.63.
2.Авторское свидетельство СССР N 222203, 101.86123/12,10.05.67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления подвижным транспортным средством | 1985 |
|
SU1336081A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ПОЛОЖЕНИЯ ПЕРЕДВИЖНЫХ МЕХАНИЗМОВ | 1968 |
|
SU222203A1 |
| Устройство для регулирования движения подвижного объекта | 1984 |
|
SU1236534A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО АКУСТИЧЕСКОЙ ЖЕСТКОСТИ | 1991 |
|
RU2006877C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2205421C1 |
| СИСТЕМА СИГНАЛИЗАЦИИ О ДОСТИЖЕНИИ ПРЕДЕЛЬНО ДОПУСТИМОЙ КОНЦЕНТРАЦИИ МЕТАНА В АТМОСФЕРЕ | 2010 |
|
RU2438186C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО АКУСТИЧЕСКОЙ ЖЕСТКОСТИ | 1991 |
|
RU2006876C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| АКУСТИЧЕСКИЙ ПАРАМЕТРИЧЕСКИЙ ПРИЕМНИК | 2010 |
|
RU2445642C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛЕДОМЕР | 1991 |
|
RU2019855C1 |