ю
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического числового управления коорди натными перемещениями при обработке изделий микроэлектроники, в частности, для установок присоединения проволочных выводов или совмещения и экспо1Н1ропания,
Цель изобретения - повышение точности позиционирования путем коррекции положения объекта в зоне, соответствующей экстремальньм значениям датчика центра контактной площадки.
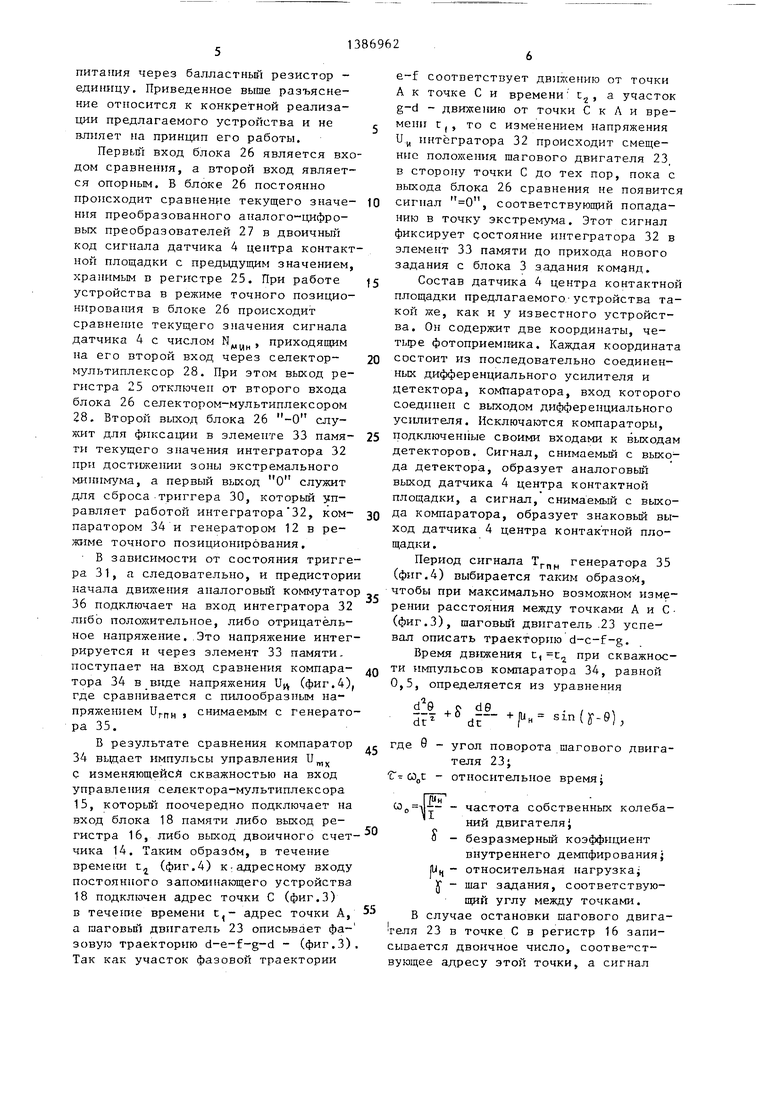
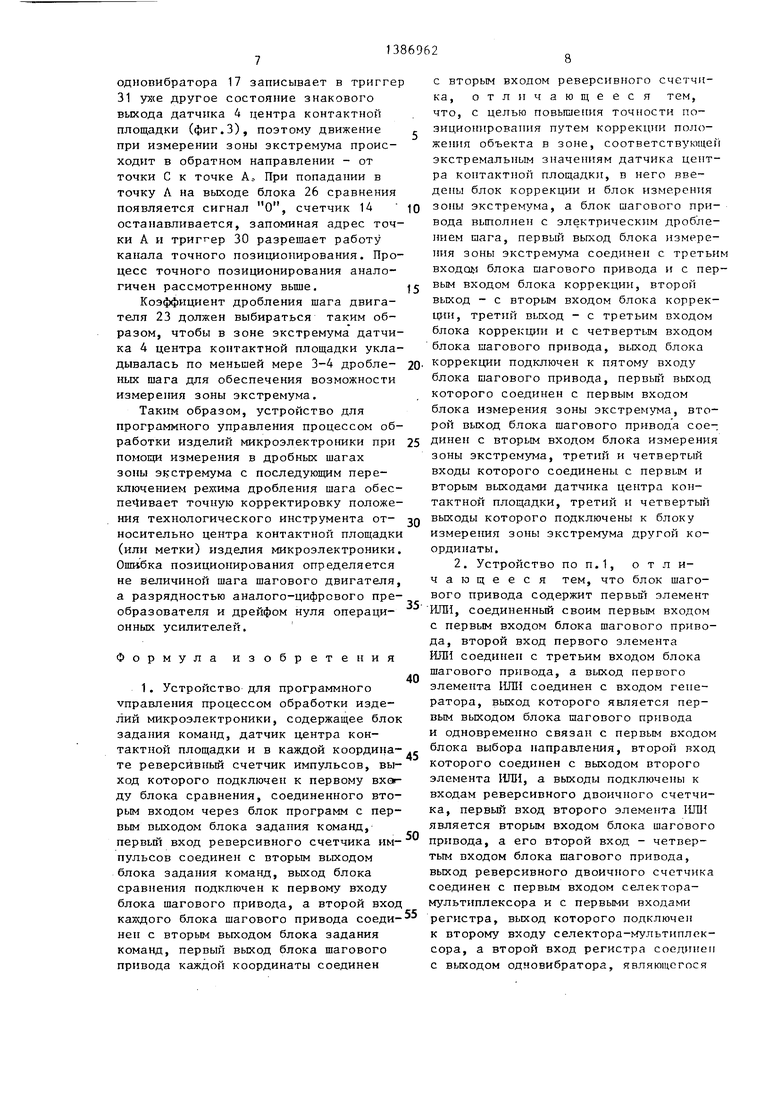
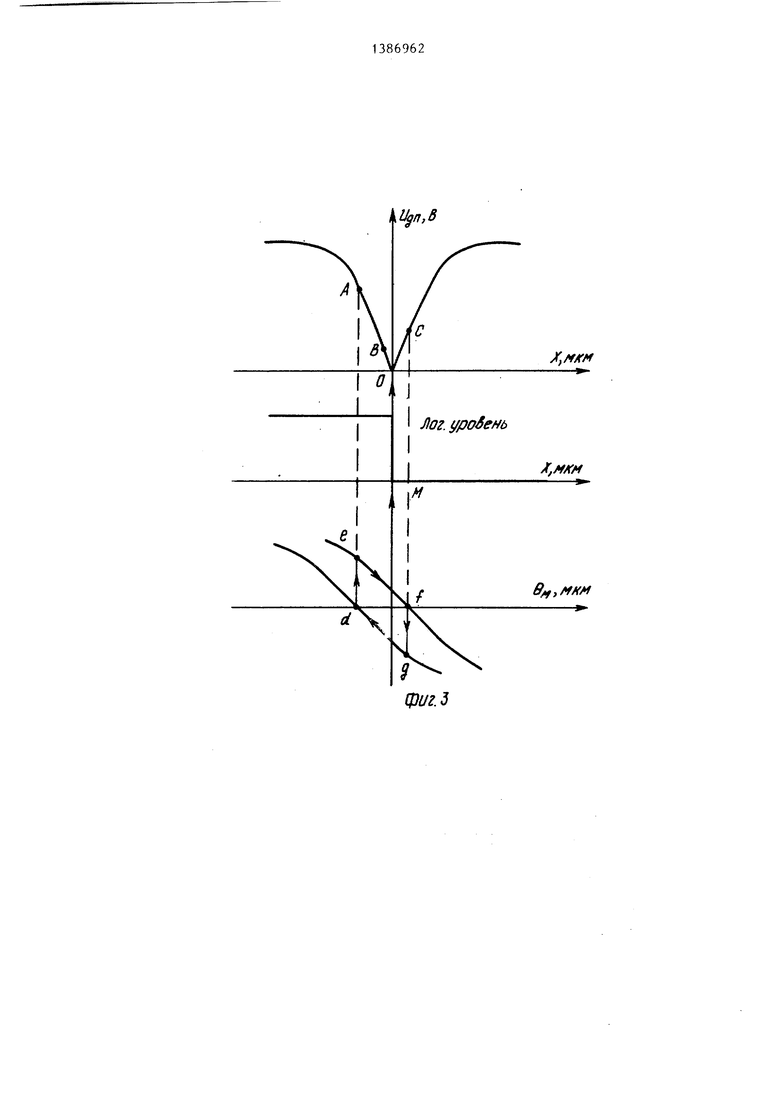
На фиг.1 представлена блок-схема предлагаемого устройства на фиг.2 - функциональная схема устройства программного управлетшя процессом обработки изделий микроэлектроники; на фиг.З - вр псодная характеристика датчика положения и фазовая траектория движения шагового двигателя в режиме точного позиционированияJ па фиг.4 - временные диаграммы работы устройств в точного позиционирования.
Устройство программного управлени процессом обработки изделий микроэлектроники содержит две координаты 1 и 2, имеющие идентичньш состав, блок 3 задания команд, датчик 4 центра контактной площадки и в кахсдой координате реверсивный счетчик 5 импульсов, блок 6 программы, -блок 7 - сравнений, блок 8 шагового привода, блок 9 измерения зоны экстремума и блок 10 коррекции.
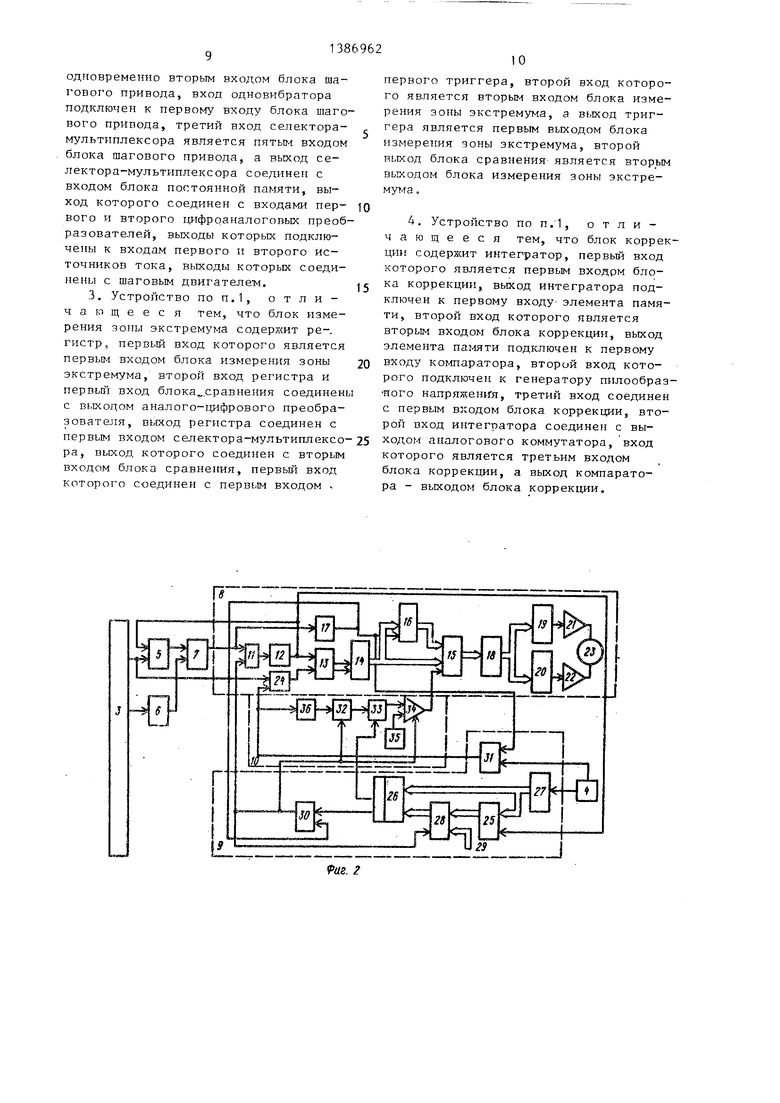
На фиг.2 изображена функциональная схема предлагаемого устройства, где показан состав блока 8 шагового привода, .блока 9 измерения зоны экстремума и блока 10 коррекции.
Блок 8 шагового привода содержит элемент 11Ш1 11, генератор 12, блок 13 выбора направления, двоичный счет чик 14, селектор-мультиплексор 15, регистр 16, одновибратор 17, блок 18 памяти, выход которого подключен к входам цифроаналоговых преобразователей 19 и 20, выходы которых соединен с входами источников 21 и 22 тока, подключенных к обмоткам шагового двигателя 23 и элемент ИЛИ 24.
Блок 9 измерения зоны экстремума содержит регистр 25, блок 26 сравне- НИН (выполнен на ЛЛЦ), аналого-цифровой преобразователь 27, селектор- мультиплексор 28, вход 29 селектора- мультиплексора 28 II триггеры 30 и 31
Блок 10 коррекции содержит интегратор 32, элемент 33 памяти, компаратор 34, генератор 35 и аналоговьш коммутатор 36.
Устройство программного управления процессом обработки И11С работает следующим образом.
Оператор, наблюдая в микроскоп, производит предварительное позиционирование объекта. Далее устройство автоматически корректирует положение инструмента oтнocиteльнo центра контактной площадки объекта и после этого производит технологическую операцию .
Начальное состояние счетчика 5 - ноль и ноль после обработки очередного йХ(У), состояние счетчика 14 ноль после предварительного пози-. ционирования объекта. Далее до окончания обработки изделия он не сбрасывается, сохраняя предыдущее состояние перед обработкой очередного значения ДХ(У)„ Начальное состояние регистров 16 и 25 не имеет значения. Такхсе iie имеет значения состояние триггера 31.
Триггер 30 в начальный момент должен быть установлен. В процессе работы, если по. окончании грубого совмещения произошло попадание в точку экстремального минимума, сброс триггера 30 не происходит, так как на выходе блока 26 присутствует сигнал- О. Если в процессе работы грубого канала происходит переход через точку экстремального минимума, то это не оказывает влияния на работу устройства, так как подтверждается установка триггера 30.
С выхода блока 3 задания команд (фиг.1) на вход блока 6 программ поступает команда Выбор адреса. С выхода блока 6 программ на вход блока 7 сравнения поступает значение следующей координаты объекта (контактной площадки, метки на кристалле ИМС) На выходе блока 7 сравнения появляется логический сигнал высокого уровня, соответствуюш;ий команде Старт, который проходит через элемент ИЛИ 11 и запускает генератор 12. Одновременно с выхода блока 3 задания команд через элемент ИЛИ 24 на вход блока 13 выбора направления поступает логический сигнал Направление.
Импульсы управления с генерг гора 12 через блок 13 выбора направления
подаются либо на вход +1 счетчика . 14, либо на вход -1 в зависимости от требуемого направления движения, При этом долхсно соблюдаться условие для частоты reiiepaTopa f, fpp,гдe fnp- частота приемистости шагового двигателя 23. Двоичное число, проходя через селектор-мультиплексор 15, находящийся в состоянии передачи данных по первому входу при отсутствии сигнала компаратора 34, образует очередной адрес выборки данных.
В блоке 18 памяти записаны синус- косинусные зависимости (для двухфаз- кого варианта шагового двигателя 23) или результаты предварительной калибровки i-ro дробленого шага шагового двигателя 23. Числа, с шмаемые с постоянного запоминающего устройства 18 по очередному адресу выборки, преобразуются в аналоговые сигналы задания цифроаналоговыми преобразователями 19 и 20; Эти сигналы определяют уровни тока, поддерживаемые источниками 21 и 22 тока в обмотках шагового двигателя 23, необходимые-для реализации режима дробления шага последнего.
Таким образом, происходит сонме- щение инструмента и очередной координаты объекта с точностью, определяемой- степенью дробления шага и параметрами нагрузки. В это время на вход счетчика 5 поступают импульсы генератора 12. Как только значения текущей и адресной координаты на входе блока 7 сравнения станут равны между собой, на выходе блока 7 сравнения появится логический сигнал низкого уровня Стоп. На этом процесс работы грубо- ца канала системы управления заканчивается .
С появлением сигнала - Стоп одно- вибратор 17, реагирующий на задний фронт сигнала блока 7 сравнения, выдает сигнал, записывающий состояние двоичного счетчика 14 Е регистр 16. Предположим, что шаговый двигатель 23 остановился в точке А (фиг.З). Тогда в регистр 16 записывается двоичное число, соответствующее адресу именно этой точки. Одновременно с этим сигнал одновибратора 17 записывает в триггер 31 состояние знакового выхода датчика и центра контактной площадки и сбрасывает триггер 30. Так как триггер 30 сброшен, то он разрешает через элемент 1ШН 11 работу гене
5 0 5
Q
5
0
0
5
ратора 12-и соответственно двоичного счетчика 14, но в направлении, определяемом состоянием триггера 31, сигнал которого подается через элемент ШИ ИЛИ 24 на вход блока 13 выбора направления .
В рассматриваемом случае дальнейшее движение продолжается в прежнем направлении к точке В (фиг.З). В процессе движения аналоговьш сигнал с выхода датчика 4 центра контактной площадки все время преобразуется аналого-цифровым преобразователем 27 в двоичное число, которое с приходом очередного импульса генератора 12 фиксируется в регистре 25. Так как триггер 30 бып сброшен, он разрешает работу селектора-ьгультиплексора 28 в рехсиме передачи данных с регистра
25на второй вход блока 26 сравнения. Учитывая, что текущее состояние выхода аналого-цифрового преобразователя
27непосредственно поступает на пер- . вьп вход блока 26 сравнения, в последнем постоянно происходит сравнение текущего значения сигнала датчика 4- центра контактной площадки с преды- ,
При движении шагового двигателя 23 от точки А к точке В и затем к точке С в последней на выходе блока
26сравнения появляется сигнал 0 так как потенциал сигнала датчика 4 центра контактной площадки в точке С выше, чем в точке В. Этот сигнал устанавливает триггер 30, вследствие чего останавливается генератор 12, а в двоичном счетчике 14 фиксируется адрес точки С. Одновременно селектор- мультиплексор 28 этим же сигналом переводится в состояние передачи числа , , соответствующего экстремальному минимуъгу сигнала датчика 4 центра контактной площадки на второй вход блока 26 сравнения. Далее триггер 30 разрешает работу интегратора 32 и компаратора 34 блока 10 коррекции (канала точного позиционирования).
Код Н„,,„ на вход мультиплексора
28подается либо вручную с помощью тумблеров, либо с помощью перемычек, соединяющих очередной вывод второго входа селектора-мультиплексора 28 с нулевым проводом либо с источником питания через балластный резистор. При этом соедине1ше с нулевьм проводом означает нуль в этом разряде (выводе), а соединение с источником
питания через балластный резистор - единицу. Приведенное выше разъяснение относится к конкретной реализации предлагаемого устройства и не влияет на принцип его работы.
Первьш вход блока 26 является входом сравнен1гя, а второй вход является опорным. В блоке 26 постоянно происходит сравнение текущего значения преобразованного аналого-цифровых преобразователей 27 в двоичньп код сигнала датчика 4 центра контактной площадки с предыдущим значением, хранимым в регистре 25. При работе устройства в режиме точного позиционирования в блоке 26 происходит сравнение текущего значения сигнала датчика 4 с числом N.,,, , приходящим
г Лп
на его второй вход через селектор- мультиплексор 28. При этом выход регистра 25 отключен от второго входа блока 26 селектором-мультиплексором 28. Второй вьпсод блока 26 -0 слу- хсит для фиксации в элементе 33 памяти текущего значения интегратора 32 при достижении зоны экстремального минимума, а первый выход О служит для сброса Триггера 30, который управляет работой интегратора 32, компаратором 34 и генератором 12 в режиме точного позиционирования,
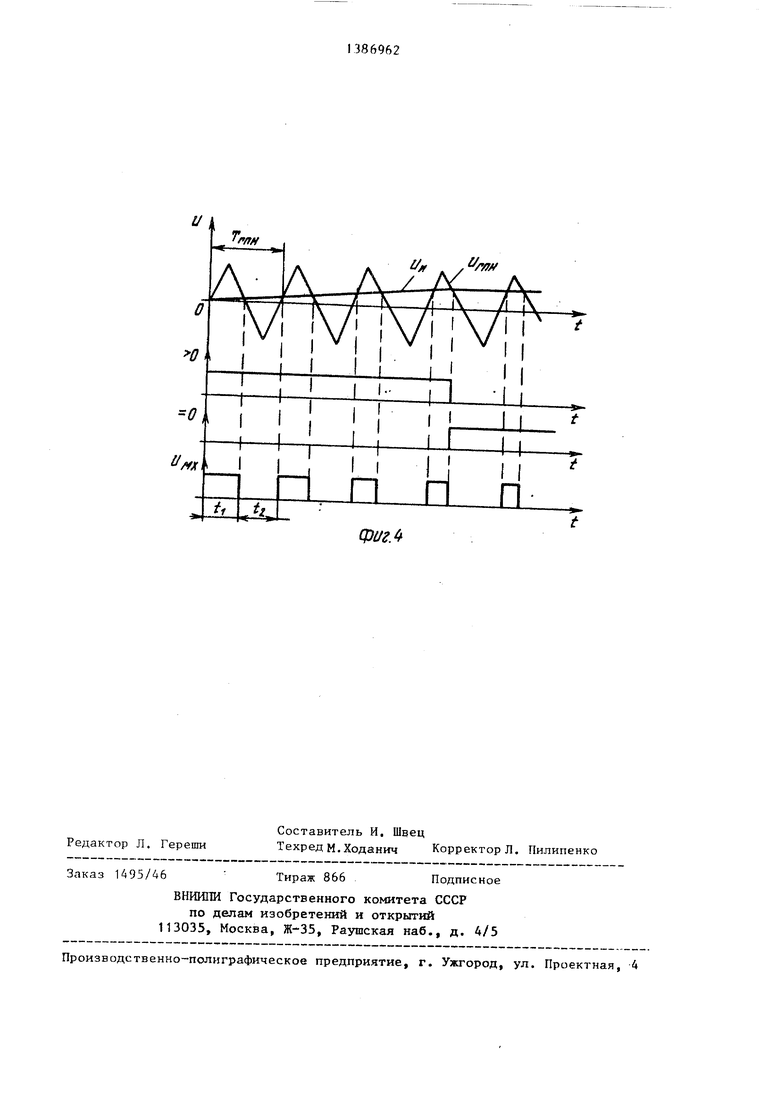
В зависимости от состояния триггера 3 1 , а следовательно, и предистории начала движения аналоговый коммутатор 36 подключает на вход интегратора 32 либо положительное, либо отрицательное напряжение. Это напряжение интегрируется и через элемент 33 памяти- поступает на вход сравнения компаратора 34 в В1ще напряжения Uj/y (фиг.4), где сравнивается с пилообразным напряжением снимаемым с генератора 35.
В результате сравнения компаратор 34 вьщает импульсы управления U С изменяющейсй скважностью на вход управления селектора-мультиплексора 15, которьй поочередно подключает на вход блока 18 памяти либо выход регистра 16, либо выход двоичного счет чика 14. Таким образбм, в течение време ш tj (фиг.4) к:адресному входу постоянного запоминающего устройства 18 подключен адрес точки С (фиг.З) в времени с,- адрес точки А, а шаговый двигатель 23 описывает фазовую траекторию d-e-f-g-d - (фиг.З) Так как участок фазовой траектории
0
5
0
5
0
e-f
А к
g-d - движению от
мепи t(, то с
и
соответствует движению от точки точке С и времени с , а участок точки С к А и вре- ,, 1W V. изменением напряжения ,, интегратора 32 происходит смещение положения шагового двигателя 23, в сторону точки С до тех пор, пока с выхода блока 26 сравнения не появится сигнал 0, соответствующий попаданию в точку экстремума. Этот сигнал фиксирует состояние интегратора 32 в элемент 33 памяти до прихода нового задания с блока 3 задания команд.
Состав датчика 4 центра контактной площадки предлагаемого/устройства такой же, как и у известного устройства. Он содержит две координаты, четыре фотоприеми-ика. Каждая координата состоит из последовательно соединенных дифференциального усилителя и детектора, комТтаратора, вход которого соединен с выходом дифференциального усилителя. Исключаются компараторы, подключен1 ые своими входами к выходам детекторов. Сигнал, снимаемый с выхода детектора, образует аналоговый выход датчика 4 центра контактной площадки, а сигнаш, снимаемый с выхода компаратора, образует знаковый выход датчика 4 центра контактной площадки ,
Период сигнала Т, генератора 35 (фиг.4) выбирается таким образов, чтобы при максимально возможном измерении расстояния между точками А и С (фиг.З), шаговый двигатель .23 успе вал описать траекторию d-c-f-g.
Время движения t,с при скважности импульсов компаратора 34, равной 0,5, определяется из уравнения
g. d0
dr
dc
+ |и„ sin(y-9
угол поворота шагового двигателя 23; относительное времяj
55
50
частота собственных колеба- HHfi двигателя J а - безразмерный коэффициент
внутреннего демпфированияj |11ц - относительная нагрузка JT - шаг задания, соответствуюш;ий углу между точками. В случае остановки шагового двигателя 23 в точке С в регистр 16 записывается двоичное число, соотве- ст- вующее адресу этой точки, а сигнал
одновибратора 17 записывает в триггер 31 уже другое состояние знакового выхода датчика 4 центра контактной площадки (фиг.З), поэтому движение при измерении зоны экстремума происходит в обратном направлении - от точки С к точке А, При попадании в точку Л на выходе блока 26 сравнения появляется сигнал О, счетчик 14 останавливается, запоминая адрес точки А и триггер 30 разрешает работу канала точного позиционирования. Процесс точного позиционирования аналогичен рассмотренному выше.
Коэффициент дробления шага двигателя 23 должен выбираться таким образом, чтобы в зоне экстремума датчика 4 центра контактной плошадки укладывалась по меньшей мере 3-4 дробле- них шага для обеспечения возможности измерения зоны экстремума.
Таким образом, устройство для программного управления процессом обработки изделий микроэлектроники при помощи измерения в дробных шагах зоны экстремума с последующим переключением режима дробления шага обеспечивает точную корректировку положения технологического инструмента от- носительно центра контактной площадки (или метки) изделия микроэлектроники. Ошибка позиционирования определяется не величиной шага шагового двигателя, а разрядностью аналого-цифрового преобразователя и дрейфом нуля операционных усилителей.
Формула изобретения
1. Устройство для программного vпpaвлeния процессом обработки изделий микроэлектроники, содержащее блок задания команд, датчик центра кон40
2. Устройство по П.1, отличающееся тем, что блок шагового привода содержит первый элемент ИЛИ, соединенньм своим первым входом с первым входом блока шагового привода, второй вход первого элемента ИЛИ соединен с третьим входом блока шагового привода, а выход первого элемента 11Ш1 соединен с входом генератора, выход которого является первым выходом блока шагового привода и одновременно связан с первым входом
тактной площадки и в каждой координа- ., выбора направления, второй вход
50
те реверсивный счетчик импульсов, выход которого подключен к первому входу блока сравнения, соединенного вто- входом через блок программ с первым выходом блока задания команд, nepBLtfi вход реверсивного счетчика импульсов соединен с вторым выходом блока задания команд, выход блока сравнения подключен к первому входу блока шагового привода, а второй вход кахсдого блока шагового привода соеди- регистра, нен с вторым выходом блока задания команд, первый выход блока шагового привода каждой координаты соединен
которого соединен с выходом второго элемента НЛП, а выходы подключены к входам реверсивного двоич1 ого счетчика, первый вход второго элемента 1ШИ является вторым входом блока шагового привода, а его второй вход - четвертым входом блока шагового привода, выход реверсивного двоичного счетчика соединен с первым входом селектора- мультиплексора и с первь ми входами выход которого подключен к второму входу селектора-мультиплексора, а второй вход регистра соедине с выходом одновибратора, являющегося
с 5
20
5 Q
5
0
с вторым входом реверсивного счетчика, отличающееся тем, что, с целью повьш1епия точности позиционирования путем коррекции положения объекта в зоне, соответствующе экстремальным датчика центра ко 1тактной площадки, в него вве- блок коррекции и блок измерения зоны экстремума, а блок шагового привода выполнен с электрическим дроблением шага, первь Й блока измерения зоны экстремума соединен с третьим входов блока шагового привода и с первым входом блока коррекции, второй выход - с вторым входом блока коррекции, третий выход - с третьим входом блока коррекции и с четвертым входом блока шагового привода, выход блока коррекции подключен к пятому входу блока шагового привода, первьп выход которого соединен с первым входом блока измерения зоны экстремума, второй выход блока шагового привода сое-, динен с вторым входом блока измерения зоны экстремума, третий и четвертый входы которого соединены с первьпч и вторым выходами датчика центра контактной площадки, третий и четвертый выходы которого подключены к блоку измерения зоны экстремума другой координаты.
2. Устройство по П.1, отличающееся тем, что блок шагового привода содержит первый элемент ИЛИ, соединенньм своим первым входом с первым входом блока шагового привода, второй вход первого элемента ИЛИ соединен с третьим входом блока шагового привода, а выход первого элемента 11Ш1 соединен с входом генератора, выход которого является первым выходом блока шагового привода и одновременно связан с первым входом
0
регистра,
которого соединен с выходом второго элемента НЛП, а выходы подключены к входам реверсивного двоич1 ого счетчика, первый вход второго элемента 1ШИ является вторым входом блока шагового привода, а его второй вход - четвертым входом блока шагового привода, выход реверсивного двоичного счетчика соединен с первым входом селектора- мультиплексора и с первь ми входами выход которого подключен к второму входу селектора-мультиплексора, а второй вход регистра соедине с выходом одновибратора, являющегося
g138
одновременно вторым входом блока ша- говот о привода, вход одновибратора подключен к первому входу блока шагового привода, третий вход селектора- мультиплексора является пятым входом блока шагового привода, а выход селектора-мультиплексора соединен с входом блока постоянной памяти, выход которого соединен с входами пер- вого и второго цифроаналоговых преобразователей, выходы которых подключены к входам первого и второго источников тока, выходы которых соединены с шаговым двигателе-м.
3. Устройство по П.1, о т л и - ч а FO щ е е с я тем, что блок измерения зоны экстремума содержит ре-, гистр, первый вход которого является первым входом блока измерения зоны экстремума, второй вход регистра и первый вход блока„,сравнения соединены с выходом аналого-1дифрового преобразователя, вьсход регистра соединен с первым входом селектора-мультиплексора, выход которого соединен с вторым входом блока сравнения, первый вход которого соединен с первым входом .
5
5
0
0
первого триггера, второй вход которого является вторым входом блока измерения зоны экстремума, а выход триггера является первым выходом блока измерения зоны экстремума, второй выход блока сравнения является вторым выходом блока измерения зоны экстремума .
4. Устройство по П.1, отличающееся тем, что блок коррекции содержит интегратор, первый вход которого является первьм входрм блока коррекции, выход интегратора подключен к первому входу- элемента памяти, второй вход которого является вторым входом блока коррекции, выход элемента па1-1яти подключен к первому входу компаратора, второй вход которого подключен к генератору пилообраз- ного напряжен1Гя, третий вход соединен с первым входом блока коррекции, второй вход интегратора соединен с выходом аналогового коммутатора, вход которого является третьим входом блока коррекции, а выход компаратора - выходом блока коррекции.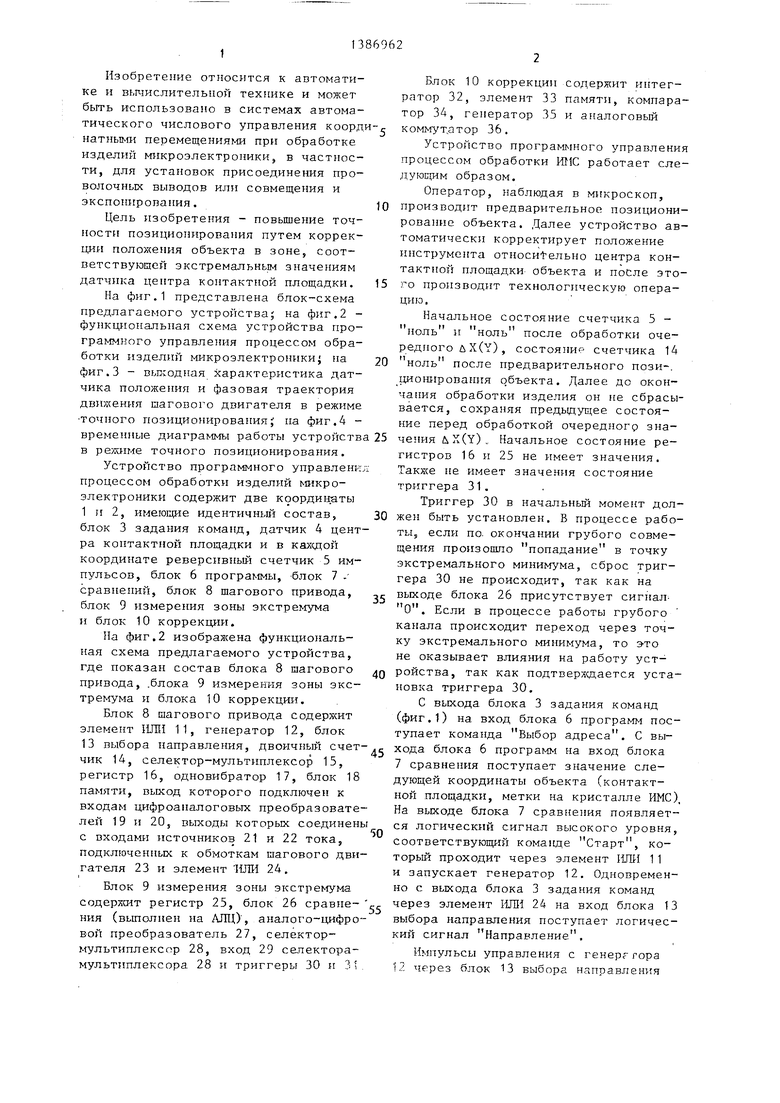
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления процессом сборки интегральных микросхем | 1982 |
|
SU1151928A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ОБРАБОТКИ ВИНТОВЫХ КАНАВОК НА ИЗДЕЛИИ | 1993 |
|
RU2082594C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО ПОЗИЦИОНИРОВАНИЯ | 1986 |
|
SU1389498A1 |
| Устройство для контроля металлизированных переходов печатной платы | 1985 |
|
SU1308955A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1647516A1 |
| Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники | 1990 |
|
SU1835534A1 |
| Устройство для определения экстремума | 1988 |
|
SU1603341A1 |
| Установка для присоединения проволочных выводов | 1991 |
|
SU1773643A1 |
| Устройство для управления @ -фазным шаговым двигателем | 1987 |
|
SU1473066A1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники. Цель изоб.ретения - повьшение точности позиционирования путем коррекции положения объекта в зоне соответственно экстремальным значениям датчика центра контактной площадки. Устройство для программного управления процессом .обработки изделий микроэлектроники содержит блок 3 задания команд, реверсивный счетчик 5, блок 7 сравнения, блок 6 программ, датчик 4 центра контактной площадки, блок 8 шагового привода, блок 9 измерения зоны экст-. ремума, блок 10 коррекции. Данное устройство при помощи измерения в дробных шагах зоны экстремума с последующим переключением режима дробления шага обеспечивает точную кор- ректирошгу положения технологического инструмента относительно центра контактной площадки изделия. Ошибка позиционирования определяется разрядностью АЦП и дрейфом нуля операционных усилителей. 3 з.п. ф-лы, 4 ил. (Q (Л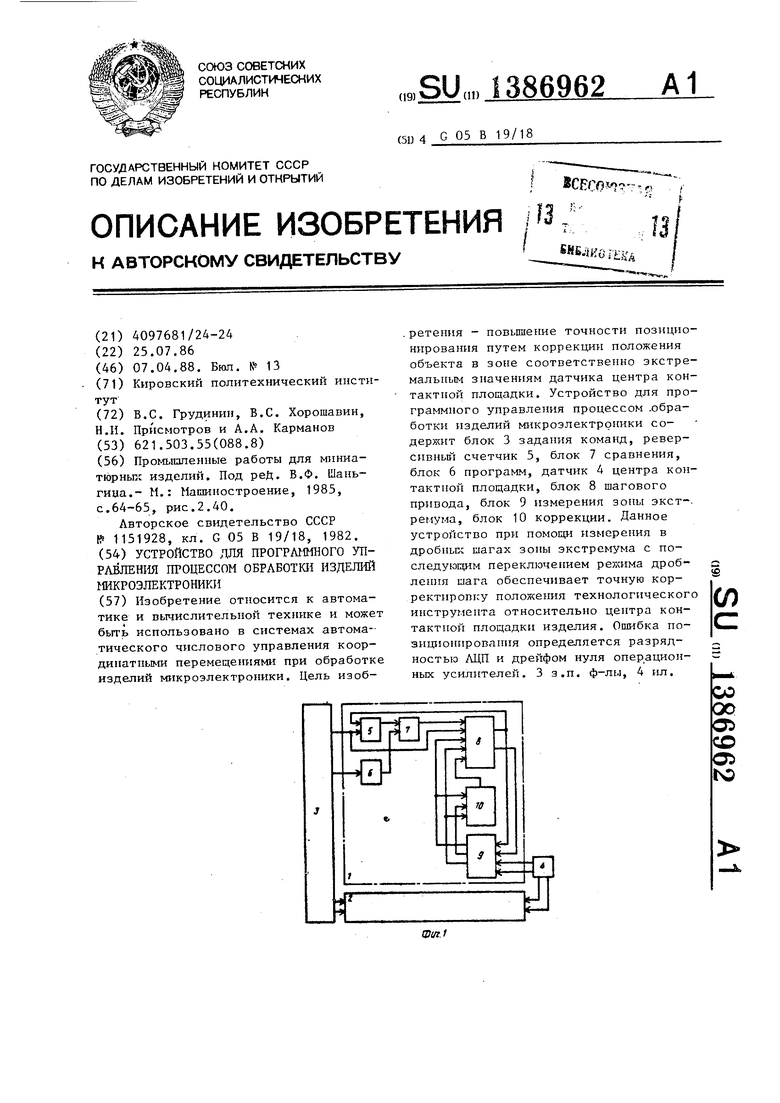
фиг.З
r1 П H H
fi
Jl
.rff
h/ К
Фиг.
t
| Промышленные работы для миниатюр ньпс изделий | |||
| Под рей | |||
| В.Ф | |||
| Шань- гнца.- М.: Машиностроение, 1985, с.64-65, рис.2.40 | |||
| Устройство для программного управления процессом сборки интегральных микросхем | 1982 |
|
SU1151928A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
