Ma контейнере 1 с возможностью вертикального перемещения относительно него установлен лоток 10 для грунта 28, образованный днищем контейнера 1, и соед1инен с ним. но периметру носредством герметично закрепленного гибкого фартука 11. По длине лотка 10 расположены и шарнирно связаны с ним два гидроцилиндра (ГЦ) 12 вертикального перемещения, нредназначенные для изменения глубины резания. Через напорную 13 и с:1ивную 14 магистрали ГЦ 12 соединены с зо.ютниковым раснределнтелем 15. Его
1
Изобретение относится к стендовому оборудованию для исследования процессов подводного резания грунтов рабочими органами землеройных машин.
Цель изобретения повышение нроиз- водительности и снижение трудоемкости исследований.
На фиг. 1 показан стенд, продольный вер- тикалы1Ь1Й разрез; на фиг. 2 -- разрез А-А на фнг. 1.
Стенд для исследования подводного ре- запия 1 рунтов землеройной мащин п1 содержит занолняемый водой контейнер 1 с про- дольпыми направляющими 2 в верхней части, в которых установлена тензометрическая тележка 3, соединенная посредством тросов 4 и б. юков 5 с приводом 6. На тензомет- рической тележке 3 нри помощи тензозве- на 7 смонтирована модель 8 раб(.)чего органа землеройной машины, например плоский режущий нож. Контейнер 1 снабжен прозрачными стенками 9 для визуального наблюдения и съемки процесса подводного резания 1ру}1та. На контейнере 1 установлен с возможностью вертикального неремещения ()тн ;ситель)1о него лоток 10 для грунта, KOTopbiii образован днищем контейнера 1 и соединен с контейнером 1 по периметру посредством ге)метично закренленног о гибкого фартука И.
.еханизм изменения глубины резания стенда выполнен в виде расположенных по д.чине лотка 10 для грунта и щарнирно связанных с ним гидроцилиндров 12 вертикального перемещения и соединенною с ними через напорную магистраль 13 и сливную магистраль 14 золотникового распределителя 15. Напориая магистраль 13 подключена к гидростанции, содержан1ей насос 16, соединенный обычным образом при номощи нерепускного к папана 17 со сливной магистралью 14. Золотниковый раснредели- тель установлен вертикально и разделен
корнус щарнирно соединен с лотком 10, а щток 25 выполнен с опорным роликом 26 на конце, который контактирует с подвижным кониром 27. При поступательном перемещении ТМТ 3 нроис.чодит резание в водной среде грунта 28 моделью 8. Копир 27 синхронно неремещается с ТМТ 3. В соответствии с профилем копира 27 перемещается 11ITOK 25. В результате с помощью ГЦ 12 нроис.ходит перемещение лотка 10 и увеличение глубины резания грунта 28 моделью 8. 2 3. п. ф-лы, 2 ил.
поршнями па вер.хнюю и нижнюю полскгти 18, соединенные с напорной магистралью 13, и центральную нолость 19, соединенную со сливной маг истралью 14. Штоковые полости гидроцилиндров 12 вертикального перемеще- ПИЯ лотка И) для грунта сообщены с гидро- посредство.м гидролиний 20 и проходных каналов золотникового распределителя 15, а порп1певые полости посредством идро.иний 21 и других проходных
0 каналов золотникового раснреде.чителя 15. Корнус золотникового распределителя 15 при помощи шарнира 22 соединен с .ютком 10 для грунта, на торцовой стенке которого закреплен шарнирный узел 23, установленный в неподвижной вертикальной паправляю- Н1ей 24. Шток 25 золотникового распределителя 15 выполнен с опорным роликом 26 на конце, который коптактирует с подвижным когщром 27. Конир 27 выполнен с фигурной поверхностью, соответствующей необходи0 мому нродольному нрофилю резания грунта 28 в лотке И) моделью 8 рабочего органа. Подвижный копир 27 смонтирован на ненодвижной горизонтальной направляющей 29. На гидролиниях 20 и 21 установлены краны 30 управления.
Подвижный конир соединен с гидропи- липдром 31 управления, который соединен через трехпозиционный iидрораспредели- тель 32 с автоно.мной гидростанцией, содер- жан1ей насос 33 и перепускной клапан 34.
0 Насос 33 соединен механической связью 35 с приводо.м 6 тензометрической тележки 3. В лотке 10 производят уплотнение и планирование поверхности грунта 28. Затем контейнер 1 заполняют водой. При вк;1юче- нии привода 6 происходит поступательное
5 гюремещение тензометрической тел.ежки 3 и резание в водной среде грунта 28 моделью 8 рабочего органа землеройной мащины. Усилие резания определяется обычным образом по изгибным напряжениям в тензозвене 7
5
при помощи комплекта тен:и)метрическои а.п- паратуры (не ,чана). Включается насос 16. одновреме 1но с ;|риволом 6 жлючаегся также насос 33, полача которого отрегулирована таким образом, что 11ереме цение подвижного копира 27 вдоль направляющей 29 осуществляется гидроцилипдром 31 синхронно с перемещением тепзометрической тележки 3. Г1ол действием подвижного копира 27 щток 25 распределителя 15 с опорным роликом 26 перемещается в вертикал1 ном направ- ,тении в соответствии с профилем yTOi o копира. При движени ; ;итика 25 tsBepx HITOKO- вые полости гидрогиминдров 12 чере;1 ;MJ) J- линии 20 соедииякгк я со средней 11и/1псг)К) 19 распреде.пиrc. i 1 15 и череч нее сч (.м)Н|1:;й м; гистра;:ьк) 14, а iiopi ;KeBi ie пс.-щстя гид- илшлиндров 12 через 1 идро:1ипии 21 ccjc- диняются с нижней полостью 18 )ас1феде- лителя 15 и через нее с напорной магист алью 13, в )сзультате чего происходит перемещение I )унгового лотка 10 иве;)х и .иче- ние глубин;. резапия г рунта 28 М()дел1,к 8 рабочего п|)г .чиа. Гибкий фартук 11 дeф(Jp- мируегс ,, прогибаясь наружу, поэтому уровень воды в контейнере 1 практически не изменяется. Движение вверх лотка 10 при (. ткрытых кранах М) происходит плоскона- ралле. 1ьн(). Однов)еменно персмещаегся вверх корпус распределителя 15, соединенный с лотком 10 посредством 111арни)а 22, что приводит к H03B)aiy с некоторьгм запаздыванием пор1пней распределителя 15 в cpezi,- нее положение, когда прекращается подача жидкости под давлением в норппк пые полости 1 идр()ии;1янд)ов 12, i. е. при изменении положения штока 25 производится ro.ib- ко кратковр1 мениос ( оответствующее включение гидропнлиндров 12. Д.чя дальнейшею включения гид)они. 1пндров 12 и 11е|)емеще- ния вверх лотка 10 необходимо инонь увеличение высогь ;|р(, фм;1Я К дии - 27. Таким о1)) гидромеханическая-: сми тгма; к(;:;:- .;) 27 ПГ1 ок 25 гидр(. 2( и 21 - i ид- роиилиндр1 1 12 лоток 10 корпус распределителя 15, является автоматической с исте . О с отрииате.()й o6parn. ;i связью, по-1воляк; цей ,чс ствлять строго дозирь - ванн(е .чер1 икальное перемещение , С1Тка 10 в соответствии с профиле.м копира 27.
При у.ич1ьп1сиии BbicoTi, нр{К(/иля копира 27 работа указанной ав1 оматической системы осуществляется в обратной последова- те.чьиости. Поскольку в верхней и нижней полостях 18 PC cП| e.тeлитeJlя 15 д.aв;ieJiкe жндкост) ;,.UitiaKoBoe. а плоихадь nopnific- ; разная (в iiiiyKHeii но.-юсти 18 | ЛоП1адь п::-|. ня .viCHbLiic на 11Л(яиад1, сечения П1тока 25), то на iiJTOK 25 при включенно.м насосе 16 щк тоянно действует вертикальная сила, направленная сверху вниз и прижимающая опорный ролик 25 к поверхности п(;движниг() копира 27. Перемеп(еиие вниз щтока соеди0
5
0
5
няет идролинии 20 и ниоковые полости гидропилиндров 12 с вtpxнeй полостью 18 распределителя 15 и нее с напорной магистралью 13 насоса 16, а гидролииии 21 и HopHJHeBbie гидронилиндров 12 с()еди}1яет со средней полостью 19 распределителя 15 и через нее со с. П1вной магистралью Ы, в результате че1Ч) происходит втягивание штоков гидроцилинд.ров 12 и опускание .лотка 10 на расстс ямие, прогюрционалык. уменьп1ению высот 1 профиля копира 27. с соответствующим уменьшением г.чубипы )е- зания грунта 28 моделью 8 рабочего органа. том стабилизация высоты профиля ко- iuipa 27 также L ,елеи11ым .запаздыванием опеспечнвает v сче( на.тичия огрицате,.- ч.)н ооратчой С(язи .между корпусом pacii;)e- де. 15 и rpyHTOBijiM лотком 10 прекращение действия гидронилнндров 12 и ста- би.жзацию r. iyGHHbi резания 1 рунта 28.
Вертикальная направляющая 24 через шарнир 2. i воспринимает случайные ори- зонта.1ьныЧ i)e;iKUHH. действующие на контейнер 1 и лоток 10, сиеспечивая строго вертикальные пepeмeщe ия 1юс,чеднего. Посредством регулировки кранов 30 обеспечивается разность давлений жидкости, |1оступам)И1ей в гидроцилиндры 12, расположенные по длине . ютка 10, что соз;ик Т воз- можност) моде.1ировапия продольно о ук,1о- на новерхности 1 рунта 28. После проведения опыта переключением распределите, .32 производится возврат подвижного Kointpa исходное положение.
OcHtiBHbiM iipci M ществом изобретения является автоматизация нроцесса моде,1И- рования профиля грунта с раз,тичнымн очертаниями и глубины резания 1 рунта. Суще- ственн(.) уменьп1ается трудоемкость и время подготовки экспериментальных исследований, что ведет к повышению производительности при работе па стеи.че.
Формула изобретения
1. ( тенд для исс.чедования подводного резания грунтов землеройной мапщной, содержащий заполняемый водой контейнер с
5 проз|1ачны.ми стенками н продо.тьными направляющими, установленную в пос.тедннх тензометричес: ук) тележку с 11)иводом, остановленный на контейнере с возмс м остью вертикального перемещения от)1()снтельно нею лоток для г1)унта, механизм изменения гл бин1 1 резания, .м(.)дсль рабочего opi ana зем.чсройной vai;c.tHi,i, чгли /акл{ иися те.м, чт(), с чс,;Тьк; iTOi biiiR-in H производительности и снижения трудоемкости исс,тедования, он снабжен вертикальной направляющей пе)е5 меи.1ения :1отка для грунта, установленным в ней и закрепленщ 1м на торцовой стенке лотка для грунта шарнирным узлом, лоток для грунта еюразован днищем контейнера.
0
5
0
0
механизм изменения глубины резания выполнен в виде расположенных по длине лотка и шарнирно связанных с ним двух гидроцилиндров вертикального перемещения, соединенного с последними через напорную и сливную магистрали золотникового рас- пpeдeлитeJ я, корпус которого шарнирно соединен с лотком для грунта, а шток выполнен с опорным роликом на конце и кон- тактируюш,его с опорным роликом подвижного копира с гидроцилиндром управления, причем модель рабочего органа землеройной мaпJины смонтирована на тензометрической тележке, а гидроцилиидры вертикального
перемещения лотка д,,1я грунта сообщены через золотниковый распределитель с гидростанцией.
2.Стенд по п. 1, отличающийся тем, что гидроцилиндр управления копиром соединен через гидрораспределитель с автономной гидростанцией, насос которой соединен механической связью с приводом тензометрической тележки.
3.Стенд по пп. 1 и 2, отличающийся тем, что лоток для грунта соединен с контейнером по периметру посредством герметично закрепленного гибкого фартука.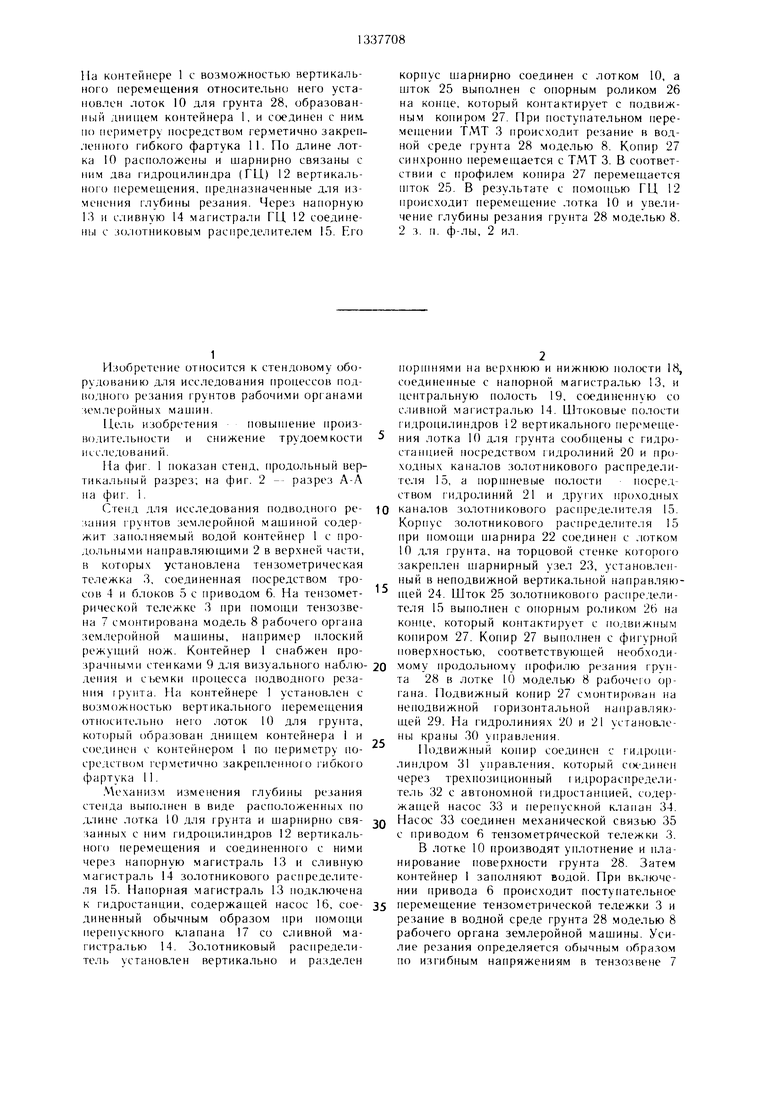
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для исследования рабочих органов землеройных машин | 1985 |
|
SU1303875A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РАБОЧИХ ОРГАНОВ МЕЛИОРАТИВНЫХ И ЗЕМЛЕРОЙНЫХ МАШИН | 2005 |
|
RU2278368C1 |
| Стенд для исследования подводного резания грунтов | 1990 |
|
SU1723269A1 |
| Стенд для испытания рабочих органов землеройных машин | 1986 |
|
SU1411604A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ РАБОЧИХ ОРГАНОВ ЗЕМЛЕРОЙНЫХ МАШИН | 2002 |
|
RU2239689C2 |
| Нагружатель стенда для испытания землеройной машины | 1987 |
|
SU1472586A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПРЕДОХРАНИТЕЛЬНЫХ МЕХАНИЗМОВ ПОЧВООБРАБАТЫВАЮЩИХ ОРУДИЙ И ИЗУЧЕНИЯ ВЛИЯНИЯ УДАРНЫХ НАГРУЗОК НА НАВЕСНЫЕ МЕХАНИЗМЫ ТРАКТОРОВ | 2012 |
|
RU2488087C1 |
| Стенд для исследования подводного резания грунтов | 1982 |
|
SU1071708A1 |
| Камнерезная машина | 1982 |
|
SU1122830A1 |
| Стенд для исследования подводного резания грунтов | 1982 |
|
SU1143808A1 |

Изобретение относится к испытательной те.хнике и позволяет производить исследования с высокой производительностью и низ- Koii трудоемкостью. В на11равляюп1И.х заполняемого водой контейнера 1 с прозрачны.ми стеклами установлена тензометрическая тележка (ТМТ) 3 с приводом 6. На ТМТ 3 при ПОМОИ1.И тензозвена 7 смонтирована модель 8 рабочего органа землеройной ман1ины . ,5 « (О со со о 00
//7/77
фиг. 2
777 //7
| Стенд для исследования процесса грунтозабора | 1980 |
|
SU907166A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
