Изобретение относится к прокатному производству, а именно к автоматическому управлению механизмами прокатного стана.
Цель изобретения - расширение диапазона измерения перемещения гидронажимного механизма.
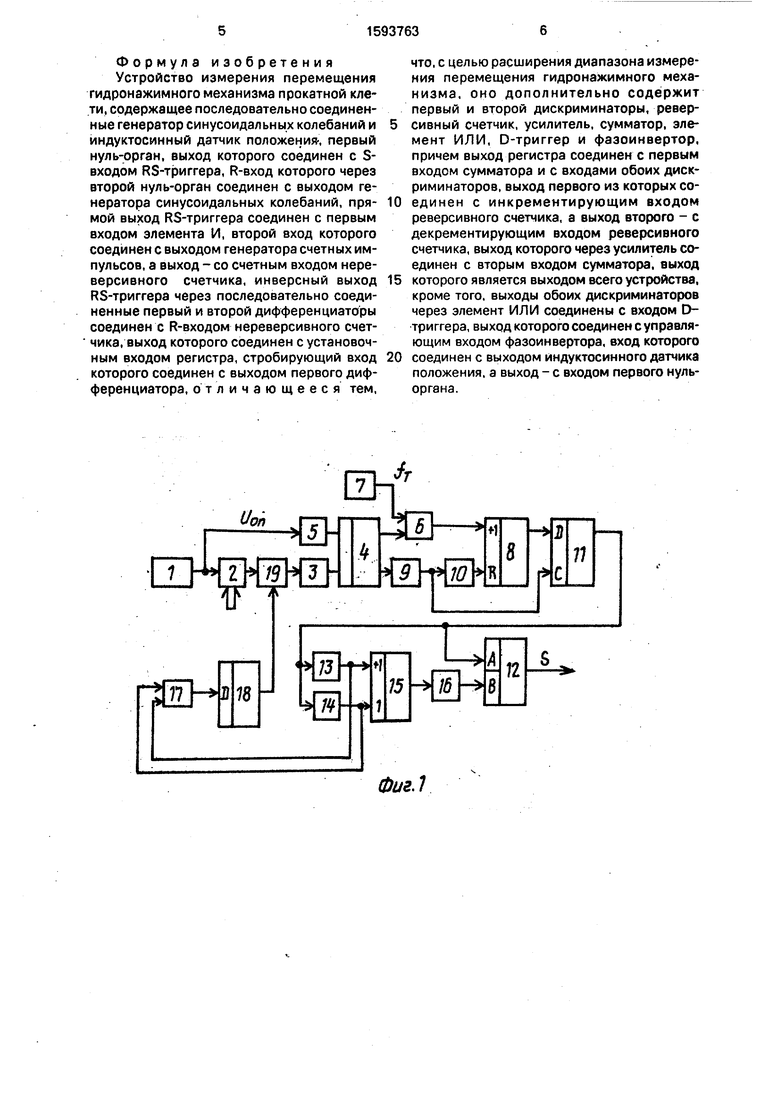
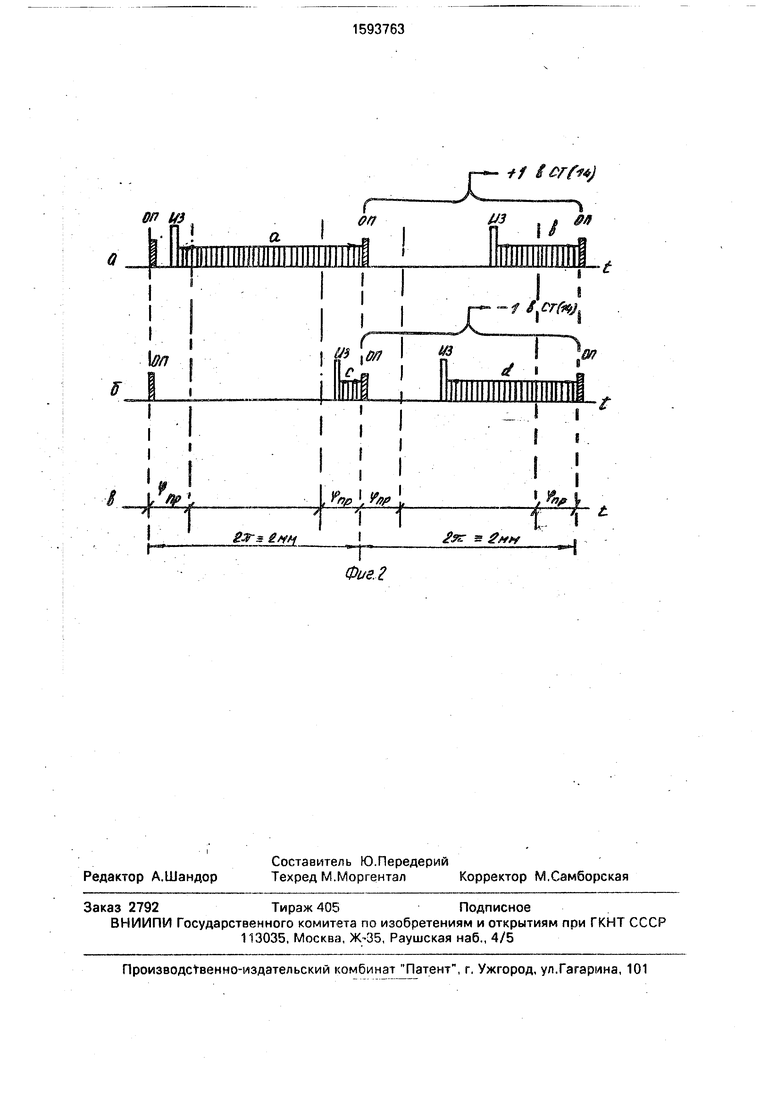
На фиг.1 представлена структурная схема устройства измерения перемещения гидронажимного механизма прокатной клети; на фиг.2 - временные диаграммы, поясняющие работу устройства.
Устройство измерения перемещения гидронажимного механизма прокатной клети содержит последовательно соединенные генератор 1 синусоидальных колебаний и индуктосинный датчик 2 положения, первый нуль-орган 3, выход которого соединен с S-входом RS-триггера 4, R-вход которого через второй нуль-орган 5 соединен с выходом генератора 1 синусоидальных колебаний, прямой выход RS-триггера 4 соединен с первым входом элемента И 6, второй вход которого соединен с выходом генератора 7 счетных импульсов, а выход - со счетным .входом нереверсивного счетчика 8, инверсный выход RS-триггера 4 через последовательно соединенные первый 9 и второй 10 дифференциаторы соединен с R-входом нереверсивного счетчика 8, выход которого соединен с установочным входом регистра 11, стробирующий вход которого соединен с выходом первого дифференциатора 9, выход регистра 11 соединен с первым входом сумматора 12 и с входами обоих дискриминаторов 13 и 14, выход первого из которых соединен с инкрементирующим входом реверсивного счетчика 15, а выход второго - с
сл
fb со
N
Оч CJ
декрементирующим входом реверсивного счетчика 15, выход которого через усилитель 16 соединен с вторым входом сумматора 12, выход которого является выходом всего устройства, кроме того, выходы обоих дискриминаторов 13 и 14 через элемент ИЛИ 17 соединены с выхо,цом D-триггера 18, выход которого соединен с управляю- . щим входом фазоинвертора 19, вход кото- ; рого соединен с выходом индуктосинного I датчика 2 положения, а выход - с входом I первого нуль-органа 3. I Устройство, работает следующим обра- : зом.
при перемещении на угол «в пределах одного шага обмоток индуктосинного дат- :чика 2 фаза его выходного (измеренного) сигнала Уиз относительно фазы опорного I напряжения Uonоднозначно определяет по- ;ложение механизма. Для определения фа- :зового сдвига используется заполнение j высокой тактовой частотой fr промежутка времени между моментами перехода через : нуль (с плюса на минус) опорного и измеренного напряжений и подсчет числа импуль- сов, Моменты перехода через нуль фиксируются нуль-органами 3 и 5, которые вырабатывают короткие импульсы. Нуль-орган 3 взводит триггер 4 и разрешает прохождение тактовых импульсов через элемент И 6 на счетный вход счетчика 8, а нуль-орган 5 : сбрасывает триггер 4 и запрещает счет им- ; пульсов. После этого дифференциаторы 9 и 10 формируют последовательно два импуль- са, первый из которых переписывает код I счетчика 8 в регистр 11 после окончания счета импульсов, а второй обнуляет счетчик i 8; подготавливая его для нового цикла измерения. Требуемая емкость счетчика определяется как , где h - шаг обмоток индуктосинного датчика, К - цена одной дискреты измерителя. Таким образом, тактовая частота больше частоты питающего напряжения в N раз,
Если фазовый сдвиг между измеренны- . ми импульсами (ИЗ) на выходе первого нуль-органа 3 и опорными импульсами (ОП) на выходе второго нуль-органа 4 выходит за пределы диапазона 0-2 л, выходной код ре .гистра 11 не соответствует истинному поло- жанию объекта. Ошибка в измерении кратна величине шага обмоток индуктосин- иого датчика. Кроме того, при нахождении измеренного импульса в непосредственной близости от опорного из-за конечного быс- тродействия элементов устройства возможна его неустойчивая работа, приводящая к ошибкам в измерении. Поэтому фазовый сдвиг ограничивается снизу величиной
р, а сверху -2 , где р-запас по фазе, величина которого определяется в частности временем, необходимым для перезаписи кода счетчика 8 в регистр 11 и последующего обнуления счетчика. При выходе за пределы допустимых фазовых сдвигов, что определяется дискриминаторами 13 и 14, на выходе одного из них появляется импульс, по которому D-триггер 18 меняет свое состояние на противоположное и тем самым с помощью фазоинвертора 19 смещает измеренный импульс на 180°, примерно в середину допустимого диапазона изменения фазового сдвига. Следующий поворот фазы может произойти только после перемещения индуктосинного датчика на половину шага его обмоток.
На фиг.2 графически отображены моменты переворота фазы измеренного сигнала индуктосинного датчика а при фазовом сдвиге больше чем 2л-(рп(, б меньше чем р , В первом случае разность фаз до момента переворота фазы измеренного сигнала а 2 . После переворота фазы, в следующем цикле измерения, разность фаз b находится уже в середине допустимого диапазона изменения и при этом а-Ь 7r. Во втором случае первоначальная разность фаз с РОП: после переворота фазы разность фаз между измеренным и опорным импульсами d с + тг и также находится в допустимом диапазоне,
Так как смещение измеренного импульса на 180° эквивалентно перемещению индуктосинного датчика на половину шага его обмоток, то можно считать, что цена импульса по выходе дискриминаторов 13 и 14, по которому происходит смена состояния D-триггера 18 на противоположное, равна также половине шага обмоток индуктосина, т.е. 1 мм. Подсчет этих имп ульсов реверсивным счетчиком 15 позволяет иметь на его выходе код перемещения с дискретностью в половину шага обмоток индуктосина. Усилитель 16 согласует цену дискретности кода на выходе реверсивного счетчика 14 с ценой кода на выходе регистра 11, после чего происходит их суммирование на сумматоре 12, выход которого является выходом всего устройства.
Таким образом, предлагаемое устройство в пределах одного шага обмоток индуктосинного датчика измеряет положение и с дискретностью в половину шага - перемещение. При практически неограниченном диапазоне измерения перемещений с малой дискретностью оно отличается высокой помехоустойчивостью.
Формула изобретения Устройство измерения перемещения гидронажимного механизма прокатной клети, содержащее последовательно соединенные генератор синусоидальных колебаний и индуктосинный датчик положения-, первый нуль-орган, выход которого соединен с S- входом Р5-т(5иггера, R-вход которого через второй нуль-орган соединен с выходом генератора синусоидальных колебаний, прямой выход RS-триггера соединен с первым входом элемента И, второй вход которого соединен с выходом генератора счетных импульсов, а выход - со счетным входом нереверсивного счетчика, инверсный выход RS-триггера через последовательно соединенные первый и второй дифференциаторы соединен с R-входом нереверсивного счетчика, выход которого соединен с установочным входом регистра, стробирующий вход которого соединен с выходом первого дифференциатора, отличающееся тем.
что, с целью расширения диапазона измерения перемещения гидронажимного механизма, оно дополнительно содержит первый и второй дискриминаторы, реверсивный счетчик, усилитель, сумматор, элемент ИЛИ, D-триггер и фазоинвертор, причем выход регистра соединен с первым входом сумматора и с входами обоих дискриминаторов, выход первого из которых соединен с инкрементирующим входом реверсивного счетчика, а выход второго - с декрементирующим входом реверсивного счетчика, выход которого через усилитель соединен с вторым входом сумматора, выход
которого является выходом всего устройства, кроме того, выходы обоих дискриминаторов через элемент ИЛИ соединены с входом D- триггера, выход которого соединен с управляющим входом фазоинвертора, вход которого
соединен с выходом индуктосинного датчика положения, а выход - с входом первого нуль- органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсно-фазовая следящая система | 1982 |
|
SU1023280A1 |
| Устройство дл коррекции показаний датчика положения нажимных устройств прокатной клети | 1990 |
|
SU1754248A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| Устройство для коррекции показаний датчика положения нажимных устройств прокатной клети | 1986 |
|
SU1338914A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU924816A1 |
| Преобразователь перемещения в код | 1980 |
|
SU942092A1 |
| Устройство для измерения линейных перемещений | 1986 |
|
SU1379601A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТЕМПЕРАТУРОПРОВОДНОСТИ | 1994 |
|
RU2090872C1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
Изобретение, в частности устройство измерения перемещения гидронажимного механизма прокатной клети относится к прокатному производству, а именно к автоматическому управлению механизмами прокатного стана. Цель изобретения - расширение диапазона измерения перемещения гидронажимного механизма. Датчиком устройства является индуктосин, работающий в режиме фазовращателя. Устройство позволяет циклически замерять фазовый сдвиг между неподвижным опорным сигналом и измеренным, меняющимся пропорционально положению фазовращателя. Чтобы фазовый сдвиг не выходит за границы диапазона 0-360° (при приближении к его границам), используется переворот на 180° фазы измеренного сигнала с соответствующим суммированием (вычитанием) половины шага обмоток индуктосина. 2 ил.
Фиг. 1
| Перельмуттер В.М | |||
| и др | |||
| Системы управления тиристорными электроприводами постоянного тока | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| .- | |||
