Изобретение относится к швейной про- мьииленности и может быть использовано, например, при создании новых видов швейных полуавтоматов с программным перемещением полуфабриката с автоматическим регулированием натяжения игольной нити в зависимости от направления перемеше- ния материала.
Целью изобретения является упрощение обслуживания.
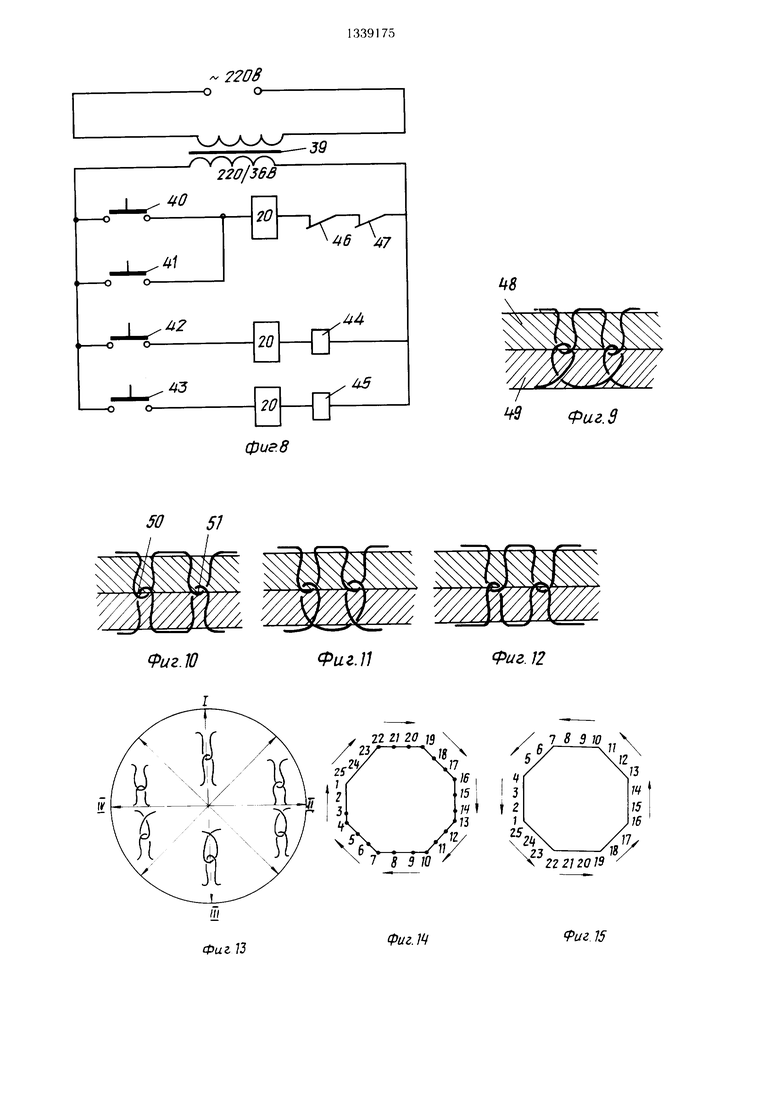
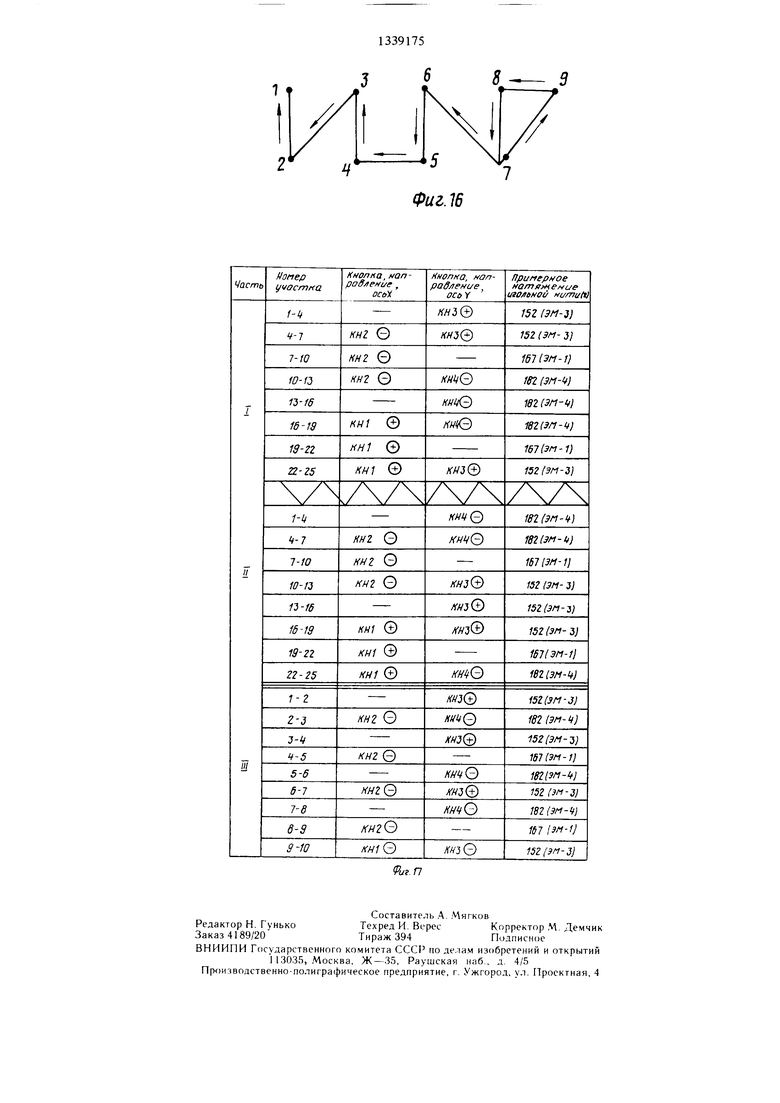
На фиг. 1 представлен швейный полуавтомат, общий вид: на фиг. 2 - головка ишейной машины с регулятором натяжения иг ольной нити; на фиг. 3 - сечение А - Л на фиг. 2 (электромагнит отключен); на фиг. 4 - то же),электромагнит включен); на фиг. 5 - конструкция датчика направления вращения и его положение при вращении по часовой стрелке, на фиг. 6 - то же, при вращении против часовой стрелки; на фиг. 7 - то же, при отсутствии вращения; на фиг. 8 - электрическая схема регулятора натяжения; на фиг. 9-12 - схемы структур стяжков; на фиг. 13 - схема связи структуры стежка с направлением перемещения изделий; на фиг. 14 и 15 - схемы распределения усилий натяжения игольной нити в строчке замкнутого контура; на фиг. 16 - пример формы, на фиг. 17 - таблица, поясняющая работу регулятора натяжения.
Швейный полуавтомат (фиг. 1) содержит швейную головку 1 с синхронизирующим блоком 2, подключенным к входу блока 3 программ формы строчки, например ЭВМ, координатный механизм в виде п аговых двигателей 4, кинематически связанных с ве- дуп1ими барабанами 5, которые с помощью тросов 6 и шкивов 7 связаны с кареткой 8 для перемещения ее во взаимно перпендикулярных направлениях X и Y. Каретка 8 снабжена сменным зажимом 9 для изделий с нанесенным на нем, например, в виде комбинации отверстий (не показаны) кодом формы п1ва, который необходимо Bbinoji- нить.
В корпусе п вейной головки 1 установлены нитенатяжители 10 с парами прижи.м- ных тарелок 11 (фиг. 2). Нитенатяжители 10 размещены по траектории движения нити 12 в местах, обеспечивающих охват нитью 12 половины периметра каждой пары тарелок.
Нитенатяжитель 10 крепится в рукаве 13 (фиг. 3) корпуса швейной головки 1 посредством полого пальца 14, закрепленного с помощью гайки 15. В пальце 14 с возможностью перемещения вдоль его оси установлен 16 с закрепленным на его конце ограничительным стержнем 17. На полом пальце 14 между упором 18 и стержнем 17 размещены прижимные тарелки и пружина 19. Нитенатяжитель 10 имеет также толкающий электромагнит 20 и средство регулирования усилия торможения в виде крон- цJтeйнa 21; закрепленного с внутренней стороны рукава 13. Во внутренней поверхности кронштейна 21 и на наружной поверхности электромагнита 20 выполнена резьба, благодаря которой можно изменять положение электромагнита вдоль его оси и тем
самым усилие торможения нити 12 при срабатывании электромагнита 20. Фиксация выбранного положения осуществляется гайкой 22.
Внутри электромагнита 20 соосно штоку 16 размещен сердечник 23. В него с тыльной
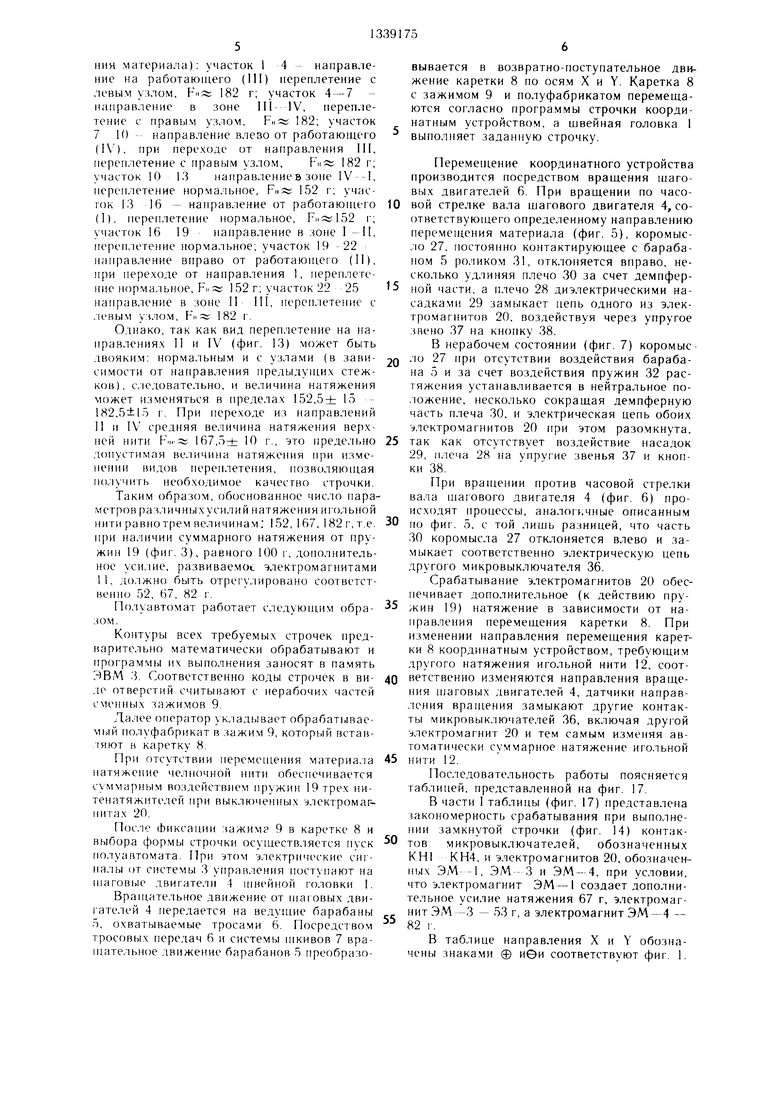
части электромагнита 20 ввинчен регулировочный винт 24 с возвратной пружиной 25. В корнусе двигателя 4 закреплен палец 26 (фиг. 5-7). На пальце 26 с возможностью свободного вращения установлен дву5 нлечий рычаг (коромысло) 27, одно плечо 28 которого заканчивается диэлектрическими насадками 29, а другое плечо 30 - свободно вращающимися роликом 31 с резиновым или другим мягким покрытием. Плечо 28 установлено между пружинами 32 растя0 жения, закрепленными на корпусе 4. Плечо 30 имеет демпферную часть, выполненную в виде стакана 33 с установленной в нем пружиной 34 и njTOKa 35, который шарнир- но связан с роликом 31. На корпусе двига5 теля 4 установлены также микровыключатели 36, содержащие упругие звенья 37 и кнопки 38.
Электрическая схема регулирования натяжения содержит (фиг. 8) понижающий трансформатор 39, контакты 40-43, котоQ рые соответствуют направлениям вращения шаговых электродвигателей 4 (на схеме имеют обозначения КН1, КН2, КНЗ, КН4) электро.магниты 20, количество которых определяется числом параметров различных усилий натяжения игольной нити 12 (ЭМ-1,
5 ЭМ-3, ЭМ-4), реле 44, 45 (РЗ, Р4) с нормально замкнутыми контактами 4(3 и 47. Выходы датчика направления вращения двигателя 4 перемещения по оси X, т.е. контактов 40 и 41, подключены к электромагниту 20 через последовательно соединен0 ные размыкающие контакты 46 и 47. Выходы датчика направления вращения двигателя 4 перемещения по оси Y, т.е. контакты 42 и 43, подключены к электромагнитам 20 соответственно второго и третьего натя- жителей и через них с катушками реле 44 и 45, которые совместно с их контактами 46 и 47 образуют блокирующий узел.
Число электромагнитов 20 определяется следующим образом.
0 Известно, что качество челночной строчки, ее внещний вид значительно зависят от правильно выбранного усилия натяжения верхней нити и вида переплетения нитей в стежке. Экспери.ментально установлено, что вид переплетения нитей в челночном
5 стежке определяется расположением носика челнока относительно иглы, направлением вращения челнока, расположением нижней нити относительно иглы и направлением перемещения материала. Руководствуясь
технологическими требованиями к виду переплетения, возможно устранить влияние трех riepEibix факторов при выборе тина машины с определенными конструктивными параметрами (определенным расположением носика челнока относительно иглы, направлением вран1ения челнока и др.)Нанравление перемещения материала не зависит от тина машины и может изменяться в процессе выполнения одной операции на швейном полуавтомате для строчек по заданному контуру.
Переплетение нитей в нормальном двух- ниточном челночном стежке (фиг. 9) представляет собой вид веревочки, в которой верхняя 1П(ть обводится вокруг нижней нити по часовой стрелке. Указанная ст)омка считается нормаль}1ой для стачивания тканей и других материалов.
При .TeHnijix условиях может no.iy- читься второй вид переплетения нитей с левым узлом (фиг. 10), в котором петля из верхней нити повернута по часовой стрелке, если смотреть снизу.
Возможен и третий вид нереилетения, отличающийся от осн(.)вного тем, что верхняя нить переплетается с нижней против часовой стре. 1ки (фиг. И). На фиг. 12 показан четвертый вид поренлетения нитей с правым узлом, в котором петля из верхней нити повернута против часовой стрелки. Четвертый вид нереплетеЕщя является «обратным второму.
Получаемые в переплетении узлы при сшивании тканей, особенно мягких, дают некрасивую строчку, имеющую форму елочки, возможен «выход уз.юв наружу материа,па. Кроме того, для затягивания челночного стежка с таким переплетением требуется повышенное натяжение верхней нити, значительно повьппенное при сп1ивании п.чот- ных материалов, как например, кожи. Это обусловлено тем, что сопротивление материалов 48 и 49 препятствует перемепк нию узлов 50 и 51 верхней нити 12 (фиг. 10) в пакете ткани. Следовательно, в зависимости от наличия узла и его вида требуется различное усилие натяжения верхней нити для обеснечения нормального внешнего вида строчки, т.е. ее качества.
Направление перемещения материала является одним из определяюп1их факторов вида переплетепия нитей в челночном стежке. Экспериментально установлена следующая зависимость вида переплетения нитей от направления перемещения материала для швейной машины с горизонтп.ль- но вращающимся челноком.
При лере.меп1,епии материала от работающего получается но)мальный вид nepen, ie- тения нитей в стежке (фиг. 9). При перемещении не работающего получается левый узел (фиг. 10). При перемеп1ении материала вправо от работающего; если нижняя нить выходит сзади иглы, переплетение пол чится
0
5
0
5
0
5
0
5
0
5
норма,1ьным, ec. iH впереди иглы, то в nefien- летении получается .чевый узе,1 (фиг. 10).
При перемен1енип материа.та в.чево от работаюп1его; если короткая ветвь, располагается сзади иглы, переплетение норма,:ь- ного вида, если короткая ветв) В1)ходит вперед иглы, то в переплетении получается правый узел (фиг. 12).
Схематично раснределение видов nepen.ie- тений в зависимости от направлений перемещения материалов изображено па фиг. 13 (вектор I соответствует направле- ш(ю «от работающего). Экспериментально установлено, что в зоне I И вид переплетепия нормальный, в направленип II при переходе от паправления I вид стежка норма,ibHbiii, при переходе от направ.чения
IIIи в зоне II 111 вид переплетения с левым у.злом, в направлении III вид переплетения с левым )з,пом, в нап1)ав,1ении
IVпри переходе от направления III и в зоне III IV вид переплетения с правым узлом, |ри переходе от направлепия I и в зоне IV -I вид переплетения нормальньп г
Экспериментально установ, 1ено, что усилие натяжения верхней нити при нормальном впде стежка д, 1я соединения костюмной ткапи в два сложения соответствует величине Р н 152,5± 15 г. При пол чении вида переплетеппя ьштей в стежке с .чевым и, 1и правым узл(:1М уси,тие натяжения верхней нити для нормальной затяжки необходимо уве;1ичить на 20± 2%. Эксперпме1гга. 1ьпо подтверждено, что усилие натяжения верхней нити при получении вида переп,пете- ния с узлом правым и,ти левым соответствует величине . 182,5± 15 г.
Рассмотрим распреде, 1ение усили) патя- жения верхней нити на конкретном примере строчки замкнутого контура |см. фиг. 14). Контур состоит из 25 стежков (стрелками указаны направления перемещения материала): участок 1-4 - направление от работа- юнхего (I) (фиг. 13). переплетение нормальное; Риж 152 г; участок 4- 7 направление в зоне I -IV , переплетение норма,пьное, Рн SS 152 г; участок 7- -10 }1анравление влево от работаюп1его (IV) при переходе от на- нравления I, переплетепие пормальрюе, Рнд: « 152 г; участок 10--13 направление н зоне IV- III, переплетенпе е прав1)1м узлом, FH% 182 г; участок 13-16 - направленпе ча работающего (III), переплетенпе с , К вым узлом, Рия; 182 г; участок I fi - 1 ) направ- , iepnie в зоне 111--П, переп,1етепие с леш.ш узлом, F ii 182 г; участок 19 2. Haii|iaB- ленпе вправо от работающего (II), при переходе от папрапления III. переплетение с левым уз,пом P l я; 182 г; участок 22 25 направление в зоне II- I, переплетепие пор- мальпое, Г нЯ: 152 г .
На фиг. 15 приведеп замкнутый контур ст|)очк11 с обратньгм нап|1ав,пением строчки (стрелками указипы напраи,1епия переметеНИН материала): участок 1 4 - направление на работающего (III) переплетение с левым узлом, FH« 182 г; участок 4 - 7 - направление в зоне III- IV , переплетение с правым узлом, Рн% 182; участок 7 10 - направление влево от работающего (IV ), при переходе от направления III, переплетение с правым узлом, Fn 182 г; участок 10 13 паправлениев зоне IV -I, переплетение нормальное, Рн« 152 г; участок 13 16 - направление от работаюп1его (I), переплетение нормальное, ри«152 г; участок 16 19 направление в зоне I - II, переплетение норма, 1ьное; участок 19-22 направление вправо от работающего (И), при переходе от направления 1, переплетение пормальное, FHSS 152 г; участок 22 25 направление в зоне И III, переплетение с .1евым узлом, FH « 182 г.
Однако, так как вид переплетение на на- нравлениях II и IV (фиг. 13) может быть двояким: нормальным и с узлами (в зависимости от направления предыдупщх стежков), с.1едовательно, и величина натяжения может изменяться в пределах 152,5± 15 - 182,5±15 г. При переходе из направлений 11 и IV средняя величина натяжения верхней нити F«. % 167,5± 10 г., это предельно допустимая величина натяжения при изме- |1е11ии видов переплетения, позволяющая получить необходимое качество строчки.
Таким образом, обск нованное число параметров различныхусилий натяжения игольной нити равно трем величинам. 152, 167, 182 г, т.е. при наличии суммарного натяжения от пружин 19 (фиг. 3), равного 100 г, до1ЮЛ}1Итель- ное усилие, развиваемое электромагнитами II, должно быть отре1Л лировано соответственно 52, 67, 82 г.
Полуавтомат работает с,:1едующим образом.
Контуры всех требуемых строчек предварительно математически обрабатывают и программы их выполнения заносят в память ЭВМ 3. Соответственно коды строчек в виде отверстий считывают с нерабочих частей сменных зажимов 9.
Далее оператор укладывает обрабатываемый полуфабрикат в зажим 9, который встав- 1ЯЮТ в каретку 8.
При отсутствии перемещения материа,:1а натяжение челночной нити обеспечивается суммарным воздействием пружин 19 трех ни- тенатяжителей при выключенных электромагнитах 20.
Пос, 1е (Ьиксапии :)ажимг 9 в каретке 8 и выбора формы строчки осуществляется пуск полуавтомата. При этом электрические сигналы от системы 3 управления поступают на шаговые двигатели 4 шнейной головки 1.
Вращательное движение от шаговых двигателей 4 передается на ведущие барабаны 5, охватываемые тросами 6. Посредс вом тросовых передач 6 и системы шкивов 7 вращательное движение барабанов 5 преобразо0
0
5
0
5
0
5
0
5
вывается в возвратно-поступательное движение каретки 8 по осям X и Y. Каретка 8 с зажимом 9 и полуфабрикатом перемещаются согласно программы строчки координатным устройством, а швейная головка I выполняет заданную строчку.
Перемещение координатного устройства производится посредством вращения шаговых двигателей 6. При вращении по часовой стрелке вала шагового двигателя 4, соответствующего определенному направлению перемещения материала (фиг. 5), коромысло 27, постоянно контактирующее с барабаном 5 роликом 31, отклоняется вправо, несколько удлиняя плечо 30 за счет демпфер- пой части, а плечо 28 диэлектрическими насадками 29 замыкает пепь одного из электромагнитов 20, воздействуя через упругое звено 37 на кнопку 38.
В нерабочем состоянии (фиг. 7) коромыс- .|о 27 при отсутствии воздействия барабана 5 и за счет воздействия пружин 32 растяжения устанавливается в нейтральное положение, несколько сокращая демпферную часть плеча 30, и электрическая цепь обоих электромагнитов 20 при этом разомкнута, так как отсутствует воздействие насадок 29, плеча 28 на упругие звенья 37 и кнопки 38.
При вращении против часовой стрелки вала шагового двигателя 4 (фиг. 6) происходят процессы, аналогичные описанным по фиг. 5, с той лишь разницей, что часть 30 коромысла 27 отклоняется влево и замыкает соответственно электрическую цепь другого микровыключателя 36.
Срабатывание электромагнитов 20 обеспечивает дополнительное (к действию пружин 19) натяжение в зависимости от направления перемещения каретки 8. При изменении направления перемещения каретки 8 координатным устройством, требующи.м другого натяжения игольной нити 12, соответственно изменяются направления вращения шаговых двигателей 4, датчики направления вращения замыкают другие контакты микровыключателей 36, включая другой электромагнит 20 и тем самым изменяя ав- то.матически суммарное натяжение игольной нити 12.
Последовательность работы поясняется таблицей, представленной на фиг. 17.
В части I таблицы (фиг. 17) представлена закономерность срабатывания при выполне- ({ии замкнутой строчки (фиг. 14) контактов микровыключателей, обозначенных KHI КН4, и электромагнитов 20, обозначенных ЭМ--1, ЭМ- 3 и ЭМ - 4, при условии, что электромагнит ЭМ-I создает дополнительное усилие натяжения 67 г, электромагнит ЭЛА -3 - 53 г, а электромагнит ЭМ-4 - 82 г.
В таблице направления X и Y обозначены знаками ф и©и соответствуют фиг. 1.
TciK, при перемещении материала (фиг. 14) на участке I 4 но оси Y в напран. кчжи © ерабатынает контакт КНЗ. .замыкая цепь электрома пита ЭМ 3, иатяжеиие. соответствующее ему, Г)2 г. (суммарное г|, (часть I таблицы).
При перемещении материала на участке 4 - 7 иеоб.холимо обеспечить перемещение координатным устройством по оси Y @ по оси X Q , т.е. срабатывают КН2 и КПЗ, но с включением КНЗ, реле 3 размыкает нормально замкнутый контакт РЗ и блокирует включение электромагнита ЭМ 1, включается только ЭМ -3, его уси, 1ие 52 г, суммарное 152 Г. При перемещепип на участке 7 10 необ.ходимо обеспечить переме иение материала коорлин; Т11ым устройством го. по оси X©, срабатывает К,Н2, включается электромагнит ЭМ 1, его усилие 67 г, суммарное Iti7 I.
При перемещении па участке 10 13 не- об.ходимп обеспечить иеремеинмпи коо)ли- натным устройством по оси Х0,по оси YG , т.е. срабатьпиж) КН2 и КН4, но с вк.иоче- нием КН4. pe.ie 4 рачмыкает нг)рмально UIM- кнутый контакт Р 4 и блокирует вк. 1юче- иие элект)омагнита ЭЛА I, вк.чючается ю.чь ко Э 4, ei(i усилие 82 г, суммарное Ж2 г.
П)и перемен1еиии па участке 13 Ki необходимо обеспечить iiepeMenienne то, 1ько по оси Y О- I 1иД занимает нейтральное положение, так кнк .ТЕ Игате. 1ь не тает, и .амыкается то.тько КН4, вк.1К)ча- ется ЭМ 4, (40 усилие 82 г, суммарное 182 г.
При перемещении на учасгкс- Ю-М) необходимо обеспечит, иере.меиц нпе координатным уст)ОЙ1. тиом мате|)иа.-|а по оси . (Э, по оси О срабатывают Kill и КМ, нос включением Kill, реле Р 4 размыкает noji- .мально контакт и б. юкирчет вк,почение э.1ек i )ома1 пита ЭМ 1, вк.1К)ча- ется T(X4ijKo ЭЛ 4, ею уси,1ие 82 г, суммар- H(je 182 г.
При пе)емеп1енип матерпа,1а на участке 19-22 Необходимо обеспечить 11Г )емеп1,ение координа ( устройством го.пько по оси .X ®. т.е. с;)аб;1 гывает К HI, вк.чючается э.1ек- тромагнит ,Э.М 1. ег(.1 уси, 1ие 67 г, суммарное 1 (i7 I.
При, персмепим ии на участке 22 25 необходимо обеспечит) пере.мещение координатным устройством мат(фиала пг) оси X @, по оси ff) чнмыкаются Kill и КНЗ, нос включением КНЗ, iie. ie 3 pa.iMiiiKaeT н()рма,тьно зам- кпут)|й кочтакг Р, ) и б, 1окирует КЛ10чение ),)ма ИИ I а ЭМ I, )чается только Э.М 3, его уси.ше 52 г, сум.марное 152 г.
В часгн И (фиг. 17) 1 риведеиы данные но строчке, 1и) на фиг. 15, а в части 111 приведен) работ) по,пуантома- та при В,И1о, иении абстракт К)й строчкп. покача Н о 1 ia фиг. 1в.
Пос,те отрабглк пр(граммы строчки проис.ходит автоматический возврат каретки 8 с за/кимом 9 в исходное г оложен 1е, затем ог( ратор уда, С с io,
5
0
5
0
5
0
5
0
5
фабрикатом из каретки, и )1Й о,ту- автомат готов к ), с,)П1ей строчки.
Формула u.tni pcTCHU.4
1.1Иве1 1Н)1Й 1о,1у;)втомат, содержапип И1вей}1ую о,1овку, 1одключе)П,1е к б,оку рограмм формь строчки двигате,тя, матически связа 1 1Ь е с ведуп1ими барабанами узлов 1еремеи1енпя кар(ток с мами для изделий в двух взаимно nepniM - дикуляр П)х на 1равле иях, электрома нит- Н)1Й нитенатяжите, 1ь, нодключе 1ный к б, ку задания 1атяже 1ия, и источпи 1апря- жения, отличающийся тем, что, с 1е,1ьк) обс,ПуЖИВаНИЯ, он С 1абже 1 , 1нительиыми э, ектромагнитиыми ните 1атяжителями с настраиваемым усилием торможе- 1ия, разме це 1Ь МП пос,едовате,тьно по траектории движения ), а блок задания на- с()де|)жит датчики 4аирав, qia- уз,тов 1ереме иепия ка- ретк) и блоки)уюн1ий узел, причем нер- вый В)П()Д источ1 ика напряжения ,1К)- к входам дагчиков а 1равле 1ия враи1е- двигат(тей уз, 1ов переме цения каретки,
Р.)1ХОД) ерВ)ГО ИЗ КОТО(1ЫХ ОДКЛ ЮЧС ,1 Ч(. рез э,1ектрома ит 1итенатяжите, к В)ходу б,1окируюии о уз,а. первым входом соеди еПИОГО с вторым В)П}ОДОМ 1СТОЧНИКа iaиряжения, а и третьим входами че рез электрома ИП)1 i.4JOTBeTCTB K)Uix .10- io. ните,)х нитенатЯжиTe, связа1: 0 о
с СООГВеТСТ П К)И1ИМИ В)ХОДаМ 1 BrOjIOlO Д,1
чика , (раи1е 1ия .я /,а е|К меи1ения кар1. Тки.
2.По,туавтома о i. 1, от.тчиющиися тем, что б,1оки|) к)И1ий у ie, i содержит э.тек- т) ре,( выводы Kaiyii t K э.)ома ре, подк,)- чены к первому в, разм)ак11пего K() э.аектр()()го ре,че,
СоедИ( 1;ТОрЫМ выводом с иерВ)1М яодом размь как)) ко 1такта вгоро() ,тектрома митно() pe, ie, ири этом е1) вывод размыкак цм о кон так га 1ервого э,к к- тромагнитно о ре, яв,: яется fsxoДОМ б,ТОКИруЮ1 1е О уЗ, 1а, BTOpl)e В.1ВОДЬ
электромагнптн)1х реле яв,як)тся соответственно вторым и третьим входам 1 блокирующего узла, а второй вывод раз- М 1каю1иего контакта второго электрома нчгНОГО ре, ,ЯеТСЯ И)1ХОДОМ б, о
узла.
3.По,1уавт()Мат i. 1, огличчющиися тем, что датчик аправ.тения вра цеиия Hia- двигате,пя содерж 1т закре 1, ia корпусе электрод 5игателя 1)|й двуп, 1ечпй и микроперек,чюча- . разм(,е с 1ротивоио,)1х сторон из К 1еч двуплече Ч) д,чя взаимо.;1ействия с ним, при этом другое 1,1ечо )1) снабжено ,)ми внутрн 1ег( с во 1М()Ж 1остью 1ереме цения
вдоль его оси подпружиненным штоком спереключателей являются выходами датчироликом для взаимодействия с поверхно- ка направления вращения шагового дви- стью ведущего барабана, а выходы мнкро-гателя.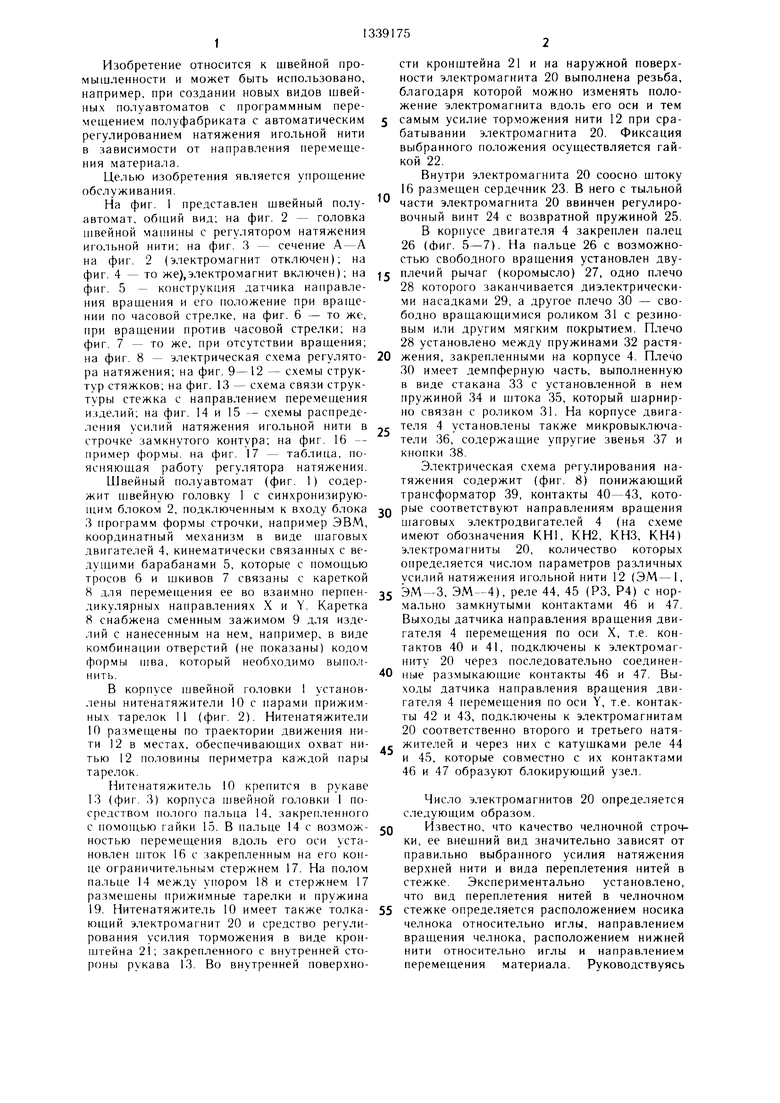

| название | год | авторы | номер документа |
|---|---|---|---|
| КРАЕОБМЕТОЧНАЯ ШВЕЙНАЯ МАШИНА | 2011 |
|
RU2493302C2 |
| МАШИНА ДЛЯ СШИВАНИЯ ПОЛОТНИЩ | 2021 |
|
RU2763580C1 |
| Швейная машина для выполнения строчек со стежками увеличенной длины | 1988 |
|
SU1652407A1 |
| СПОСОБ ОТСЕКАНИЯ ВЕРХНЕЙ И НИЖНЕЙ НИТЕЙ В ЧЕЛНОЧНЫХ ШВЕЙНЫХ МАШИНАХ | 1970 |
|
SU280372A1 |
| ПОЛУАВТОМАТ ДЛЯ ВЫПОЛНЕНИЯ СТРОЧКИ ПО ЗАДАННОМУ КОНТУРУ | 1971 |
|
SU309989A1 |
| Швейная машина однониточного цепного стежка | 1982 |
|
SU1124055A1 |
| ПРИСТАВКА ОБМЕТОЧНО-СТАЧНОГО ШВА | 1999 |
|
RU2176695C2 |
| КРЕПЕЖНЫЙ УЗЕЛ ИЗ ТКАНОЙ СИЛОВОЙ ЛЕНТЫ И ТКАНАЯ СИЛОВАЯ ЛЕНТА ДЛЯ ИЗГОТОВЛЕНИЯ КРЕПЕЖНЫХ УЗЛОВ | 2007 |
|
RU2364666C1 |
| Швейная машина | 1989 |
|
SU1668505A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВОДА ЗАЖАТОГО ПОД ЛАПКОЙ КОНЦА ИГОЛЬНОЙ НИТКИ НА ИЗНАНОЧНУЮ СТОРОНУ СТАЧИВАЕМОГО МАТЕРИАЛА НА ШВЕЙНОЙ МАШИНЕ | 1991 |
|
RU2036994C1 |

И.чобрстенис относнгся к i:i; - ii-ii);i ii|io- мышленности. Щ . П К) и (оПрстснии ч.-5-:г;ся упрощение )Г)с. |ужиЕ а11ИЯ. Устр ;Г;С1;м оГнч-- печивает iipoi ()e перемени HI.с ito.iy- фабриката с автоматическим )ei y,()iaHH ем натяжения шо.чьной нити и ; иисимО сти от нанрав.тения пе|)еме11и ния. При перемещении материа.ча вправо - влево контакты КП 1 и КН 2 датчика направ.че- ния вращении 1 И1ателя привода по координате X вк,11очак)т электромагнит ЭМ 1 nepiioro нигенатнжите, 1я. При иеремсни нии материа.та от оператора и,ти к нему срабатывают контакты ,1ибо КП 3. либо КП 4 датчика нанранлення вранюния двигателя прир.о.та но к(:орди1 ат: N. Вк.тючастся тромамигг . -). 3 и 1И З.Ч 4, а лектромаг- НИ1 А I 01 к.И . чается контактом Р 3 и.ти Г 4. Ка/кдый v,i-K:p()Mai НИ1 со.дает свое усилие г(.:(Ч1ия, от,1ичн )е от дру1-ого. Поэтому н|1и различных направления.х переме- Н1ения материала, влиякмци.х на форму у.ч- ,10В стежков и усилие, необходимое для виедре1П1я их в материа. создаются необ- .ходи.мые ве,1ичины натяжений. 2 ,.н. ф., 17 и.1. (С (Л оо CAJ ;о СП фиг.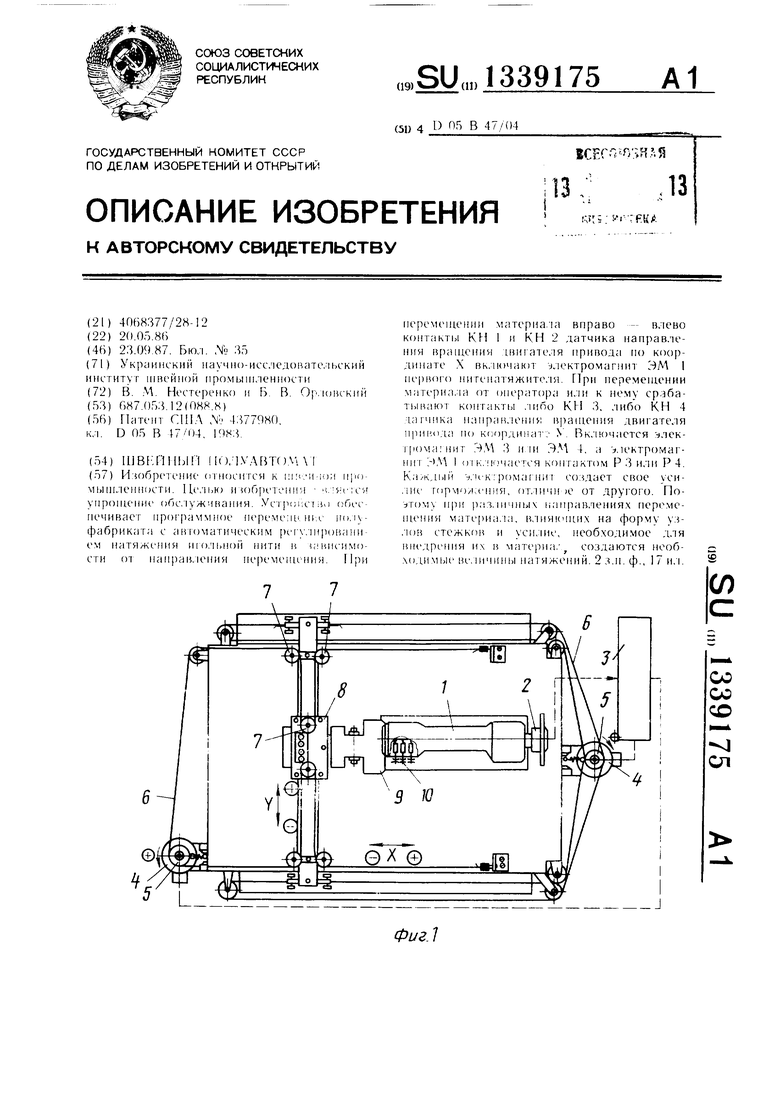
м
Фи.г.2.
12
22
2Q
Фи.1.3
А-А
Фи.гЦ
36
) UI
Г
-ЛЛЛЛгФиг. 5
Фиг.б
Фаг
2208 -о о22О/36В
6 V
.2
43
20Q
U4
I
Фиг.З
фиг 8
50 51
иг.Ю
ФигЛ
Фиг. 12
22 г/ 20 В / 1 8 ЭЮ
w л f
3
щ
15 16
22 2120 }9
IS
Фиг. 14
(риг 75
Фиг. 16
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
