является повышение быстродействия устройства вблизи верхней границы диапазона частот входного сигнала (20-30 Гц), Измерение проводится посредством формирования в сумматоре 8 сигнала, компенсирующего в сумматоре 9 сигнал, возникающий на выходе исследуемой системы под действием входного синусоидального напряжения с выхода генерат.ора 25. Компенсирующий ,сигнал представляет собой сумму напряжений, соответственно компенсирующих вещественную, мнимую и постоянную составляющие сигнала на выходе исследуемого объекта. Оценки вещественной и мнимой ЧХ и постоянной составляющей формируются соответственно на выходах интеграторов 5, 6, 7 при возникновении на выходе сумматора 9 ошибки компенсации. При детек1
Изобретение относится к специализированным вычислительным устройствам для исследования и контроля систем автоматического управления и регулирования (САУ и Р), предназначено для определения частотных характеристик (ЧХ) как самих автоматических систем, так и функцио.нальных узлов и является усовершенствованием устройства по авт. св. № 1191888,
Цель изобретения - повышение быстродействия устройства.
На чертеже приведена структурная схема устройства для определения частотных характеристик САУ и Р.
Устройство содержит множительные блоки 1-4, интеграторы 5-7, сумматоры 8 и 9, аттенюаторы 10 и 11,фильт- ры 12-14, блок 15 зоны нечувствительности, блоки 16 и 17 коррекции усиления, управляемый усилитель 18,датчик 19 частоты, индикаторы 20 и 21. и управляющие элементы 22 и 23.Вход исследуемой САУ и Р 24 соединен с выходом аттенюатора 10, а выход - с одним из входов сумматора 9, выход которого через последовательно сое- . диненные фильтр 12, блок 15 зоны нечувствительности, первый блок 16 коррекции усиления и управляемый усили39499
тировании последней в мпожительных блоках 1 и 3 соответственно синусоидальным и косинусоидальным сигналами с выходо в фильтров 13 и 14 образуются сигналы, в среднем за период пропорциональные отклонению оценок ЧХ от измеряемых значений, которые поступают на входы интеграторов 5 и 6. Интегрирование прекращается при равенстве оценок вещественной и мнимой ЧХ реальным измеряемым величинам, что соответствует нулю ошибки компенсации на выходе сумматора 9. Для повышения быстродействия введена дополнительная коррекция коэффициента усиления в контурах подстройки оценок ЧХ по частоте путем подачи на управляющие входы интеграторов 5 и 6 сигнала с выхода датчика частоты 19, 1 ил.
тель 18 подключен к первым входам множительных блоков 1 и 3 и к информационному входу второго блока 17 коррекции усиления,выход которого
через интегратор 7 подключен к одному из входов сумматора 8.
Выход множительного блока 1 через последовательно соединенные интегратор 5 и множительный блок 2 подклю чен к второму входу сумматора В, выход множительного блока 3 через последовательно соединенные интегратор 6 и множительный блок 4 подключен к третьему входу сумматора 8, выход которого через аттенюатор 11 соединен с вторым входом сумматора 9,-Первый выход генератора 25 подключен к входу датчика 19 частоты, к второму входу множительного блока 2 и через
фильтр 13 к второму входу мнолситель- ного блока 1, второй выход генератора 25 с фазой колебаний, отличной от фазы колебаний первого выхода на JI/2, подключен к второму входу
жителъ.ного блока 4 и через фильтр 14 к второму входу множительного блока 3. Управляющие входы аттенюаторов 10 и 11 и управляемого усилителя 18 соединены с выходом управляющего эле- мента 23. Вход индикатора 20 соеди3
нен с выходом интегратора 4, а вход индикатора 21 подключен к выходу интегратора 6. Выход датчика 19 частоты соединен с первым управляющими входами блоков 16 и 17 коррекции усиления и с управляющими входами интеграторов 5 и 6. Выход управляюще- о элемента 22 подключен к вторым (вправляющим входам блоков 16 и 17 оррекции усиления.
Принцип действия известного уст- )ойства основан на автоматической юдстройке идентификаторов вещественной P(t) и мнимой Q(t) ЧХ по закону J.
P(t) Aagsinwt dt,
а л t
q(t) f )t dt, (1)
0 0
где a, u) - амплитуда и частота входного синусоидального воздействия
Л - эквивалентный коэффициент усиления в каналах подстройки оценок P(t) ир(±);
t - ошибка компенсации вида.
Е Хйых (t)-a Р sinwt - а Q coscot а р (ы)-р (ы)-Q jcoswt.
Значение коэффициента усиления Д линейно зависит от частоты с« входного синусоидального воздействия. Однако коррекция коэффициента усиления Л по частоте u) путем умножения невязки на текущее значение частоты не обеспечивает приемлемого быстродействия процессов подстройки оценок ЧХ во всем диапазоне изменения частот, который на практике составляет О,1-ЗП Гц,
Работа предлагаемого устройства так же, как и известного, основана на автоматической компенсации сигнала X вых установившегося под действием входного сигнала х j, а sinut на входе исследуемо й САУ и Р
X., aP(u))sinwt+aQ(a))cosujt,
оЫХ
где Р(а)) , Q(W) - соответственно вещественная и мнима частотные характеристики САУ и Р, подлежащие определению.
Сигнал с выхода исследуемой САУ и Р подается на один из вхоДов сумматора 9, на другой вход которого
1
и
;
339499поступает компенсационный сигнал х,, получаемый на выходе сумматора 8 путем сложения сигналов aPsinUit и aQcosU C:
- - .А
х, aPsinwt+aQcosUt.
л л
При несовпадении оценок Р и Q с истинными измеряемыми значениями P(w)
1Q и Q(w) ошибка компенсации на выходе сумматора 9, согласно (2) не равная нулю, проходя через фильтр 12, блок 15 зоны нечувствительности,блок 16 коррекции усиления и управляемый
5 усилитель 18, поступает на входы множительных блоков 1 и 3. Б результате детектирования ошибки сигналами
аА . sin(tut + ф) и aA,(w)cos(wt + l/ ) ,
Vj
где АфСы) и ц (иО - амплитудная и фазовая частотные характеристики фильтров 13 и 14, на выходах блоков 1 и 3 умножения образуются сигналы,
25 в среднем за период пропорциональные ошибкам P(oj)-P и Q(u))-0. Поступая далее на входы интеграторов 5 и 6, эти сигналы вызывают подстройку оценки Р (на выходе интегратора 5)
30 и оценки Q (на выходе интегратора 6). При этом компенсирующий сигнал Хц изменяется таким образом, что ошибка компенсации Е непрерывно уменьшается. Процессы измерения заканчиваются при полном обнулении ошибки . При этом сигналы на входах интегра-. торов 5 и 6 равны нулю и показания индикаторов 20 и 21 фиксируют, как следует из (2), значения, равные из40 меряемым ЧХ исследуемой САУ и Р:
Р Р(а-) , Q Q(co).
Для повьш1ения быстродействия процесса измерения вблизи верхней границы
45 диапазона частот входного синусоидального сигнала введены дополнительные связи с выхода датчика 19 частоты на управляющие входы интеграторов 5 и 6, что позволяет измеgg нять коэффициент Л по частоте одновременно в блоке 16 коррекции усиления и в интеграторах 5 и 6, Необходимое для обеспечения приемлемого быстродействия многократное (в сотни
55 раз) изменение коэффициента формируется как произведение коэффициента соответствующем интеграторе и коэффициента блоке 16 коррекции усиления
35
Л.ЛрЛ.Л.,
(3)
где АО - общий коэффи11;иент усиления в контурах подстройки оценок Р и Q, соответствующий нижней границе диапазона рабочих частот со . Такой способ коррекции общего коэффициента усиления при равенстве Ap(j ЛЕ позволяет резко уменьшить требуемое изменение коэффициента /) в блоке коррекции усиления: с Лр 300 в известном устройстве до значения Лс YllOO 17,4. Это дает возможность уменьшить уровень сигнала на выходе этого блока, тем самым обеспечив его работу в линейной зоне. За счет этого становится возможным на верхних частотах диапазона
л л измерение оценок Р и Q, Предлагаемая
коррекция позволяет увеличить реальную скорость интегрирования, обеспечив тем самым приемлемое быстродействие процессов измерения на высоких частотах. Коррекция может быть реализована, например, если в состав интегратора (5 или 6) включить множительный блок, на один из входов которого подается входной сигнал интегратора, а на другой вход - управляющий сигнал с выхода датчика 19 частоты.
В случаях, когда не предтэявляет.- ся высоких требований к быстродействию процессов идентификации ЧХ, допустима упрощенная реализация предСоставитель В.Хромов Редактор В.Петраш Техред М.Ходанич Корректор А.Тяско
Заказ 4218/36 Тираж 863Подписное
В1ШИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.. Проектная, 4
339А99°
лагаемой коррекции коэффициента усиления по диапазонам частот, на которые разбивается вся рабочая область частот устройства. В этом случае оператор выступает в качестве датчика частоты, переключая четьфех- секционный (для одновременного изменения коэффициента в блоках 16 и 17
Q коррекции усиления и в интеграторах 5 и 6) многопозиционный (для реализации нескольких значений коэффициента усиления в соответствии с тре- буемьм числом диапазонов частот)
g переключатель в зависимости от конкретной частоты, на которой производится измерение.
Таким образом, обеспечивается реализация необходимого на высоких частотах большого коэффициента усиления в контурах подстройки оценок Р и Q и тем самым быстродействие процессов измерения в указанной об- ласти (20-30 Гц).
Форму л-а изобретения
Устройство для определения частотных характеристик систем автоматического управления и регулирования по авт. св. № 1191888, отличающееся тем, что, с целью повьш1ения быстродействия устройства, выход датчика частоты подключен к управляющим входам первого и второго интеграторов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1984 |
|
SU1191888A1 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1295371A1 |
| Адаптивный вычислитель частотных характеристик систем автоматического управления | 1980 |
|
SU1072004A1 |
| Анализатор частотных характеристик | 1977 |
|
SU702352A1 |
| Анализатор частотных характеристик линейных систем управления | 1976 |
|
SU640264A1 |
| Самонастраивающаяся система регулирования | 1972 |
|
SU448432A1 |
| Устройство для определения частотных характеристик систем автоматического управления | 1980 |
|
SU892419A2 |
| Устройство для определения частотных характеристик линейных систем регулирования | 1976 |
|
SU648951A1 |
| Устройство для определения амплитуднофазовых характеристик | 1977 |
|
SU664157A1 |
| Компенсационный фазометр | 1977 |
|
SU736018A1 |
Устройство предназначено для измерения вещественной и мнимой частотных характеристик (ЧХ) различного рода систем в инфранизком диапазоне частот входного синусоидального сигнала как в лабораторных, так и в заводских условиях. Целью изобретения (Л ГЧ)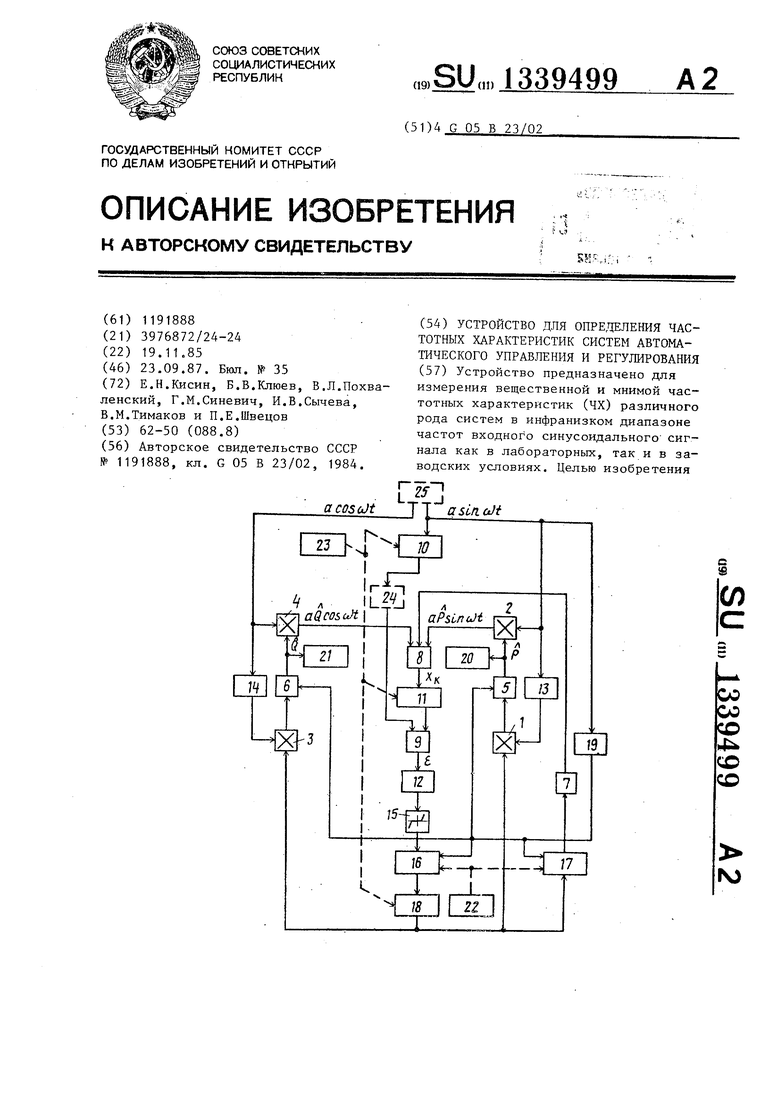
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1984 |
|
SU1191888A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
