(54) САМОНАСТРАИВАЮПДАЯСЯ СИСТЕМА РЕГУЛИГО ОТЩ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1984 |
|
SU1191888A1 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1339499A2 |
| Система автоматической идентификации | 1978 |
|
SU930270A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Самонастраивающийся регулятор | 1978 |
|
SU805248A1 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2011 |
|
RU2457529C1 |
| РАДИОЛИНИЯ СВЯЗИ С ПОВТОРНЫМ ИСПОЛЬЗОВАНИЕМ ЧАСТОТЫ | 2003 |
|
RU2233029C1 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1295371A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1986 |
|
SU1840555A1 |
1
Изобретение относится к области самонастраиваюпхихся систем регулирования.
Известна самонастраивающаяся система регулирования, содержащая в основном контуре последовательно соединенные первый сумматор, множительное устройство на два входа и объект регулирования, выход которого соединен с одним из входов первого сумматора, первый интегратор, выход которого соединен с вторым входом множительного устройства, последовательно соединённые второй интегратор и управляемый по частоте генератор гармонических сигналов, с одного выхода которого снимается сигнал синусоидальной формы, а с другого - косинусоидальной формы, причем первый выход соединен с одним из входов первого синхронного детектора и с другим входом первого сумматора, а второй выход - с одним из входов второго синхронного детектора.
Однако пз-за сложности конструкции снижается надежность такой самонастраивающейся системы регулирования. Кроме того, использование для подавления гармоник двойной частоты и выделения средней составляющей синхронных детекторов сглаживающих фильтров понижает быстродействие системы.
Цель изобретения - повыщение надежности и быстродействия самонастраивающейся системы регулирования.
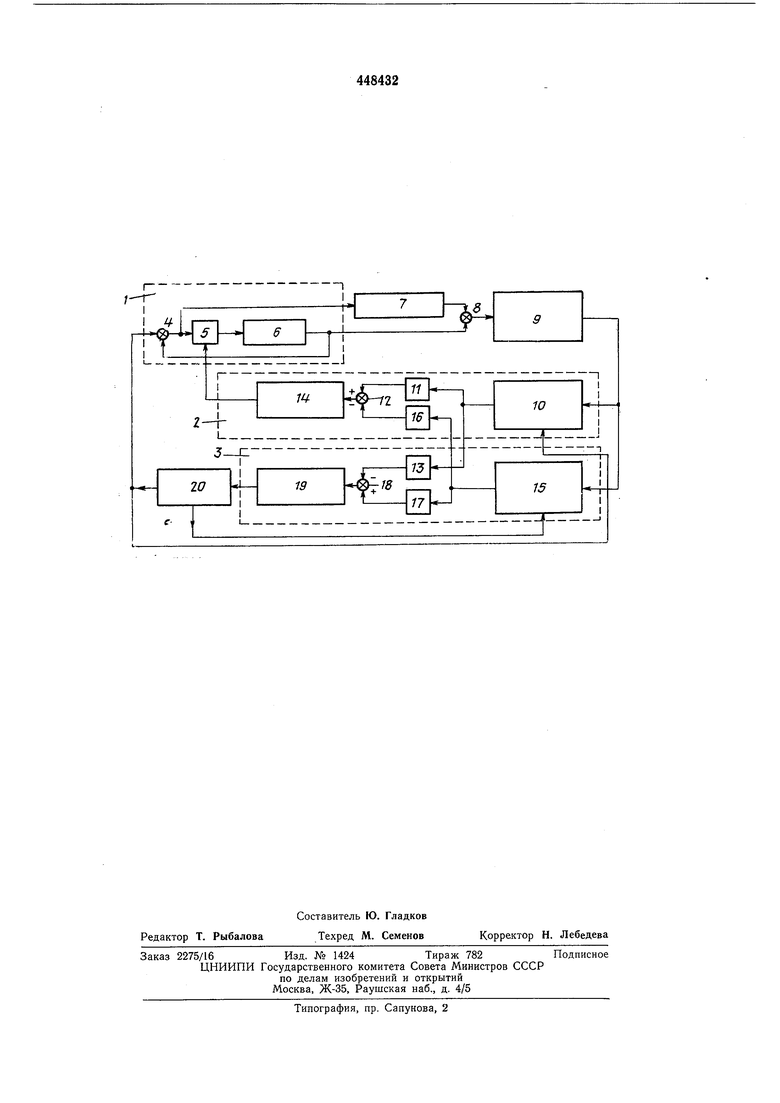
Это достигается тем, что в системе установлены второй и третий сумматоры, четыре усилителя, последовательно соединенные аттенюатор, четвертый сумматор на два входа и нелинейный элемент, выход которого соединен с входами первого и второго синхронных детекторов, выход первого сумматора соединен с аттенюатором. Выход объекта управления соединен с вторым входом четвертого сумматора, выход второго сумматора - с первым интегратором, выход третьего сумматора - с вторым интегратором. Выход первого синхронго детектора через первый и третий усилители связан соответственно с одним из двух входов второго сумматора и с одним из двух входов третьего сумматора, а второй синхронный детектор через второй и четвертый усилители соединен соответственно с вторым входом второго и с вторым входом третьего сумматоров. На чертеже показана блок-схема предлагаемой системы.
Самонастраивающаяся система регулирования содержит основной контур 1 управления, канал 2 подстройки амплитуды и канал 3 подстройки частоты. Основной контур управления состоит из последовательно соединенных первого сумматора 4, множительного устройства 5 на два входа и объекта 6 управления, выход которого связан с одним из двух входов сумматора 4.
Выход сумматора 4, связанный с одним из двух входов множительного устройства 5, подключен через аттенюатор 7 к одному из двух входов четвертого сумматора 8, другой вход которого связан с выходом объекта управления, а выход - с входом нелинейного элемента 9.
Выход нелинейного элемента подключен к одному из входов сихронного детектора 10 канал подстройки амплитуды, а выход синхронного детектора через усилитель 11 - к одному из двух входов второго сумматора 12 и к входу усилителя 13.
Выход сумматора 12 связан с входом интегратора 14, выход которого подключен к второму входу множительного устройства 5. Синхронный детектор 15 канала 3 подстройки частоты одним из своих входов подключен к выходу нелинейного элемента 9, а выходом через усилитель 16 - к второму входу сумматора 12 и одновременно через усилитель 17 к одному из двух входов третьего сумматора 18, второй вход которого связан с выходом усилителя 13.
Выход сумматора 18 связан с входом интегратора 19, выход которого подключен к входу управляемого по частоте генератора 20 гармонических колебаний, с одного выхода которого снимается сигнал синусоидальной формы, а с другого - косинусоидальной формы. При этом первый выход генератора 20 связан с вторым входом первого сумматора 4 и одновременно с другим входом синхронного детектора 10, а второй выход генератора 20 подключен к другому входу синхронного детектора 15.
Самонастраивающаяся система регулирования работает следующим образом.
Сигнал asm(i)t с выхода управляемого по частоте генератора 20 гармонических колебаний поступает на вход основного контура 1 управления и на один из входов синхронного детектора 10 канала 2 подстройки амплитуды, сигнал acosco генератора 20 поступает на один из входов синхронного детектора 15 канала 3 подстройки частоты.
Сигнал ощибки г основного контура управления с выхода сумматора 4 подается через аттенюатор 7 с коэффициентом на один из двух входов сумматора 8, на второй вход которого подается сигнал JBHX с основного контура управления. Сигнал /(t) с выхода сумматора 8 через нелинейный элемент 9 подается на вторые входы синхронных детекторов 10 и 15.
Выходной сигнал синхронного детектора 10 усиливается в /Ci и в /Сз раз соответственно на усилителях 11 и 13 и подается на один из двух входов сумматоров 12 и 18. Выходной сигнал с детектора 15 усиливается в /Сз и в /(4 раз на усилителях 16 и 17 соответственно и подается на вторые входы сумматоров 12 и 18.
Сигнал с выхода сумматора 12 интегрируется интегратором 14 и перенастраивает коэффициент усиления д множительного устройства 5. Сигнал с выхода сумматора 18 интегрируется
интегратором 19 и перенастраивает частоту ш управляемого по частоте генератора 20 гармонических сигналов. Алгоритм работы самонастраивающейся
системы получается из следующих соображений. Контур самонастройки системы поддерживает постоянный запас устойчивости по амплитуде основного контура, т. е. стабилизирует амплитудно-частотную характеристику
разомкнутого основного контура на граничной частоте
(уЧр)|.йзадан.(1)
Сигнал A(t) K,e(t)+XBj,i:s.(i) с выхода сумматора 8 с учетом очевидных соотношений
е(0 а|Ц7,(Уи)|81пИ + ср)1
АЗЫХ (О « I (У«) 11 W (/«)) I sin (u)+ ср), 1
где W(J(a) q-Wo{Jw) - частотная характеристика разомкнутого основного контура;
Wo(/u)) -частотная характеристика объекта 6 управления;
I
WK (У«)
1 + 1Г(
9 argr (уЪ); ср argir. (ym); 6 arg U7e (/«) + arg W (y-cu) + в, (3) можно представить в виде Д (О а 1 (уш) I U sin (u) -f ср) -f I/ cos ( )
(4)
где : :/ir+|r(yaj)lcOse
(5)
(y«,)|sine
Из выражения (4) следует, что сигнал A(i)0 при U Q и одновременно, что выполнимо при
argWJ(yco) e
(6) |1Г(Уш)|.АГ
Установив коэффициент аттенюатора 7 - /1задан и учитывая выражение (1), заключаем, что условие А()0 может быть выполнено, если
Ш-«ЗГР и |и(Усо)| /гзаданИз рассмотренного следует, что функционирование контура самонастройки системы регулирования сводится к обнулению сигнала А() с выхода сумматора 8 с помощью автоматического подбора частоты гармонических сигналов управляемого по частоте генератора 20 до значения (о Шгр и подстройки на этой
частоте коэффициента усиления q множительного устройства 5 до выполнения равенства
|Г(уЧр)| 7-|И7„(уЧр)1-/гзада„.
Рассмотрим функцию
ф f/ + V.(7)
Эта функция определенно-положительная i
тождественно равна нулю лишь при выполнеПИИ условия Л(г)0. Чтобы функция Ф обнулялась, нужно, чтобы - О. Дифференцируя выражение (7) по времени i, получаем , 1 dtatdt, dllF(ya)l -1 + rf|iy(| dU d dt dQ dt dVd 1 Г(уо)| dV ив ,y. + ) d -(/«) I Полагая - /- sign Д (f) cos (tuif + cp) с учетом выражений (4) и (5) имеем )Т Из выражения (10) следует, что при , если А(/), и dt - Е О, если Д (О Е 0. uf При квазистационарном рассмотрен цессов в общем случае ((,(л) и в яв функциями вида ((/м) (9, 0 6(9,со). Следовательно d I W (УС.)) I д I 1У ( I rfg qd dt а 11Г(уш) I ufo) йшdt дд dq . дО d dt dq dtдш dt Вводя в выражение (9) значения (j,s,) dO dtdt согласно выражению (11), раскрывая dUdU dVdV (ja} dQ (j) are в соответствии с (5) и решая систему dq d носительпо -- и получаем алгори dt dt стройки частоты и алгоритм подстройк фициента усиления множительного уст 5, реализация которых обеспечивает ние сигнала А(/) сумматора 8 Sign А (О АГ, sin (ut + да) - г -/r,COS((B/+cp) -signA() /Гз81пК+) + cos (ш/+ ср)1 д (У) Коэффициенты /Ci-K.z являются коэффициентами усиления усилителей 11-17 соответственно. (|т + ф) и соз() можно заменить на sinco и cosco, так как в малом (при 9 «7. и I W7 (/со„р) I h, ср arg W,. (уЪгр) 3 - arg 1 + IW (уЧр) | cos0+ + y|l(y4p)Isine 0.(14) Предмет изобретения Самонастраивающаяся система регулирования, содержащая в основном контуре управления последовательно соединенные первый сумматор, множительное устройство и объект регулирования, выход которого соединен с одним из входов первого сумматора, первый интегратор, выход которого соединен с одним из входов множительного устройства, последовательно соединенные второй интегратор и генератор, синусоидный выход которого соединен с одним из входов первого синхронного детектора, косинусный выход которого соединен с одним из входов второго синхронного детектора и с другим входом первого сумматора, отличающаяся тем, что, с целью увеличения надежности и быстродействия системы регулирования, в ней установлены второй и третий сумматоры, четыре усилителя, последовательно соединенные аттенюатор, четвертый сумматор и нелинейный элемент, выход которого соединен с входами первого и второго синхронных детекторов, выход первого сумматора соединен с аттенюатором, выход объекта регулирования соединен с другим входом четвертого сумматора, выход второго сумматора соединен с первым интегратором, выход третьего сумматора соединен с вторым интегратором, выход первого синхронного детектора через первый и третий усилители соединен соответственно с вторым и третьим сумматорами, а второй синхронный детектор через второй и четвертый усилители соединен соответственно с вторым и третьим сумматорами.
