характеристик в инфранизком диапазоне частот. Устройство для определения частотных характеристик систем автоматического управления и ре- гулиров ания содержит первый 1, второй 2, третий 3 и четвертый 4 блоки умножения, первый 5, второй 6 и третий 7 интеграторы, первый 8 и второй 9 сумматоры, первый 10 и второй 11 аттенюаторы, первый 12, второй 13 и третий 14 фильтры, блок 15 зоны не- чувстви тельнссти, первый 16 и второй 17 блоки коррекции усиления, управляемый усилитель 18, датчик 19 частоты, первый 20 и второй 2 индикаторы, первый 22, второй 23, третий 24,
1
Изобретение относится к специализированным вычислительным устройствам для исследования и контроля систем автоматического управления и регулирования, предназначено для определения частотных характеристик как самих автоматических систем, так и их функциональных узлов и является усовершенствованием устройства по авт,св, № 1191886,
Цель изобретения - повышение точности работы устройства.
На чертеже приведена структурная схема устройства.
Устройство содерл5ит первый 1 , второй 2, третий 3 и четвертый 4 блоки умножения, первьгй 5, второй 6 и третий 7 интеграторы, первый 8 и второй 9 сумматоры, первый 10 и второй 11 аттенюаторы, первый 12, второй 13 и третий 14 фильтры, блок 15 зоны нечувствительности, первый 16 и второй 17 блоки коррекции усиления, управляемый усилитель 18, датчик 19 частоты, пер вьй 20 и второй 21 индикаторы первый 22, второй 23, третий 24 и четвертый 25 управляющие элементы, исследуемую систему 26 автоматического управления и генератор 27,
Принцип действия устройства основан на автоматической компенсации сигнала Х , установившегося под f eйcтвиeм входного сигнала Xj asincat
четвертый 25 управляющие элементы и генератор 27, Цель изобретения достигается за счет введения управляющих элементов 24 и 25, предназначенных для одновременного переключения коэффициентов на входах сумматоров 8 и 9, интеграторов 5 и 6 и индикаторов 20 и 21, Это позволяет, с одной стороны, повысить точность перемножения сигналов за счет повышения уровня сигналов на входах блоков 2 и 4 умножения и, с другой стороны, сохранить неизменными динамические свойства устройства за счет коррекции коэффициентов в интеграторах 5 и 6 и индикаторах 20 и 21. 1 ил.
5
0
5
0
на выходе исследуемой системы автоматического управления
вых а-P(co)sincot+aQ(co)cosQt, где а и Q - амплитуда и частота воздействия на входе системы;
P(to)Q(co) - соответственно вещественная и мнимая частотные характеристики, подлежащие определению. Устройство работает следующим образом.
Сигнал с выхода исследуемой системы 26 автоматического управления подается на один из входов второго сумматора 9, на другой вход которого поступает компенсационньй сигнал Хц, получа емый на выходе первого сумматора 8 путем сложения сигнала aPsincOt с выхода второго блока 2 умножения и сигнала aQcoscot с выхода четвертого блока 4 умножения: X aPsintot+aQcos6)t,
При несовпадении оценок Р и Q с истинными измеряемыми значениями Р(()) и Q(w) на выходе второго сумматора 9 возникает ошибка компенсации вида
Хць, -X.(a))- sinQt+a Q({o)- - coscot,(1)
не равная нулю. Проходя через первый фильтр 12, блок 15 зоны нечувствительности, первый блок 16 коррекции усиления и управляемый усилитель 18,
, 31295371
ошибка компенсации б поступает на входы первого 1 и третьего 3 блоков умножения, В результате детектирования ошибки S сигналами
от ро ка ря
аА (со) згпСсоС+Ц ф)
aA(o)cos(cot + -cp), где АдаСо) иЦ)ф(о) - амплитудная и
фазовая частотные характеристики второго 13 и третьего 14 фильтров,
на выходах первого и третьего 3 блоков умножения образуются сигналы, в среднем за период пропорциональные разностным ошибкам (Р(о)-Р (и))- -Qj Поступая далее на входы первого 5 и второго 6 интеграторов, эти сигналы вызывают подстройку оценки Р (на выходе интегратора 5) и оцен- ки Q (на выходе интегратора 6). При этом компенсирующий сигнал X|j aFsincot+aQcosat
изменяется таким образом, что ошибка компенсации 6 непрерывно уменьшается. Процессы измерения заканчиваются при полном обнулении ошибки. При этом сигналы на входах интегра-, торов равны нулю и показания первого 20 и второго 21 индикаторов фиксируют, как следует из значения (1), равные измеряемым частотным характеристикам исследуемой системы автоматического управления:
(fo), (w).
Для обеспечения возможности измерения в широком диапазоне изменения оценок Р и Q (при кратности изме нения в десятки раз) в схему устройства введены управлякщие элементы 2А (в канале подстройки Р) и 25 (в канале подстройки Q), позволяющие варьировать коэффициенты усиления на входах первого сумматора 8 и изменят тем самым, масштабы оценок Р и Q, Если необходимо увеличить масштаб оценки Р, то с помощью третьего упраляющего элемента 24 уменьшается в k аз коэффициент на том входе первого сумматора 8, на который поступает составляющая компенсирующего сигнала aPsinfOt b выхода второго блока 2 умножения. При этом невязка 6 принимает вид
Хвь,х - ka|sinut+aQcos(jt aCP(w)-kP sinUt -a Q(o)- -Q cosut,
o
5
0
5
0
5
откуда следует, что процесс интегрирования продолжается до тех пор. пока не устанавливаются значения Р и , Q, обнуляющие невязку и удовлетво- paBBHj TBaM
(w), (co),
т,е масштаб представления оценки Р изменяется в k раз:
„рм .
Таким образом, если измеряемое значение P(ui)) мало (сопоставимо с уровнем статических погрешностей второго блока 2 умножения), то, умень-- |Шая с помощью третьего управляю- щего элемента 24 коэффициент k (), можно увеличить значение напряжения на выходе первого интегратора 5, соответствующее измеряемому значению Р(о), Это позволяет обеспечить работу второго блока 2 умножения при больших значениях входного напряжения. Тем самым снижается относительная погрешность измерения и становится возможным измерение малых значений Р(со), соизмеримых с уровнем статических погрешностей работы реального множительного блока. Аналогично, переключая с помощью четвертого управляющего элемента 25 коэффициент на том- входе первого сумматора 8, на который поступает сигнал aQcosat с выхода четвертого блока 4 умножения, получают, что при равенстве ошибки Е нулю справедливо
(0), Q
-9М k
Тем самым, при увеличивается масштаб представления оценки Q,
Это позволяет обеспечить при малых зн ачениях Q(GL)) более высокий уровень напряжения на выходе второго интегратора 6 и, тем самым, снизить уровень относительных погрешностей измерения Q(a). Введение регулировки коэффициентов на входах . первого сумматора 8 позволяет разделить требуемый диапазон измерения вещественной Р и мнимой Q частотных характеристик на необходимое число поддиапазонов (отдельно для Р(со) и Q(CO))I каждому из которых соот- ветсвует коэффициент k на входе первого сумматора 8, При этом внутри каждого поддиапазона пределы изменения напряжения на выходах интегратоов находятся в зоне, где обеспечивается высокая точность работы блока 2 или 4 соответственно для каналов подстройки оценок Р или Q. Вместе с тем, изменение коэффициентов на входах.сумматора, а следовательно.
Л А
и масштаба оценок Р и Q на выходах интеграторов 5 и 6 приводит к изменению показаний индикаторов 20 и 21. При снятии показаний в этом случае приходится учитывать масштабный коэффициент k, что усложняет работу оператора с устройством, в конечном счете, увеличивая время, необходимое для фиксирования результатов измерения. Поэтому одновременно: с Переключением коэффициента в первом сумматоре 8 вводится переключение масштаба в первом индикаторе 20 для Р и во втором индикаторе 21 для Q. Р этом случае показания индикаторов РН и Q j составляют
К (co)
Q,(co).
т.е. при переключении масштаба k показания индикаторов не изменяются и соответствуют измеряемым величинам Р(СО) и Q(tO). Кроме того, переключение коэффициентов на входах первогосумматора 8 приводит к изменению общего коэффициента усиления в контурах подстройки оценок Р и Q в k раз, что снижает быстродействие процесса измерения, ухудшая динамические свойства -устройства. Для сохранения быстродействия процессов измерения целесообразно одновременно , с переключением коэффициента на одном из входов первого сумматора 8 производить обратное по величине изменение коэффициента на входе соответствующего интегратора (на входе первого интегратора 5 при изменении масштаба по Р или на входе второго интегратора 6 при переключении масштаба по Q). При этом общий коэффициент усиления в контурах подстройки Р и Q остается неизменным и равным
ВНИИПИ Заказ 617/54
Произв.-похмгр. пр-тие, г. Ужгород, ул. Проектная, 4
k(4-) A.
Р Ч k В результате обеспечения постоянства общего коэсЪфициента усиления
динамического свойства контур ов подстройки оценок Р и Q при переключении масштабов не изменяются. Третий управляющий элемент 24 в канале подстройки Р и четвертый управляющий
элемент 25 в канапе подстройки Q могут, быть реализованы, например в виде многопозиционных трехсекционных переключателей, позволяюш;их одновременно в трех блоках устройства (в
первом сумматоре 8, в первом интеграторе 5 и в первом индикаторе 20 для Р либо в первом сумматоре 8, во втором интеграторе 6 и во втором индикаторе 21 для Q) производить изменение
коэффициентов усиления,
Таким образом, введение управляющих элементов 24 и 25 в схему известного устройства позволяет при малых значениях измеряемых частотных характеристик Р(со) и Q({i)) повысить уровень рабочих, сигналов на входах второго 2 и четвертого 4 блоков умножения до значений, когда статические погрешности преобразования сигналов
в этих блоках становятся незначительными. За счет этого повьшгается точность измерения частотных характеристик при малых значениях Р(со) и Q(co),
Формула изобретения
Устройство для определения частотных характеристик систем автоматического улравления и регулирования
по авт.ев, № 1191886, отличающееся тем, что, с целью повышения точности работы устройства, в него введены третий и четвертый управляющие элементы, выход третьего
управляющего элемента соединен с
управляющими входами первого индикатора, первого интегратора и с первым управляющим входом первого сумматора, а выход четвертого управляющего элемента соединен с управляющими входами второго индикатора, второго интегратора и с вторым управляющим входом первого сумматора.
Тираж 864
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1339499A2 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1984 |
|
SU1191888A1 |
| Адаптивный вычислитель частотных характеристик систем автоматического управления | 1980 |
|
SU1072004A1 |
| Устройство для определения частотных характеристик систем автоматического управления | 1980 |
|
SU892419A2 |
| Анализатор частотных характеристик линейных систем управления | 1976 |
|
SU640264A1 |
| Анализатор частотных характеристик | 1977 |
|
SU702352A1 |
| Устройство для определения параметров экспоненциально-косинусной модели корреляционной функции | 1985 |
|
SU1302271A1 |
| Устройство для коррекции массы кокса | 1987 |
|
SU1468917A1 |
| Измеритель элементов матрицы спектральной плотности мощности двух сигналов | 1985 |
|
SU1307375A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
Изобретение относится к автоматике и вычислительной технике и предназначено для измерения вещественной и мнимой частотных характеристик систем автоматического управления и регулирования. Целью изобретения является повышение точности измерения малых значений частотных а СОЛ (лЬ 27 « Т Т а 6in (Л N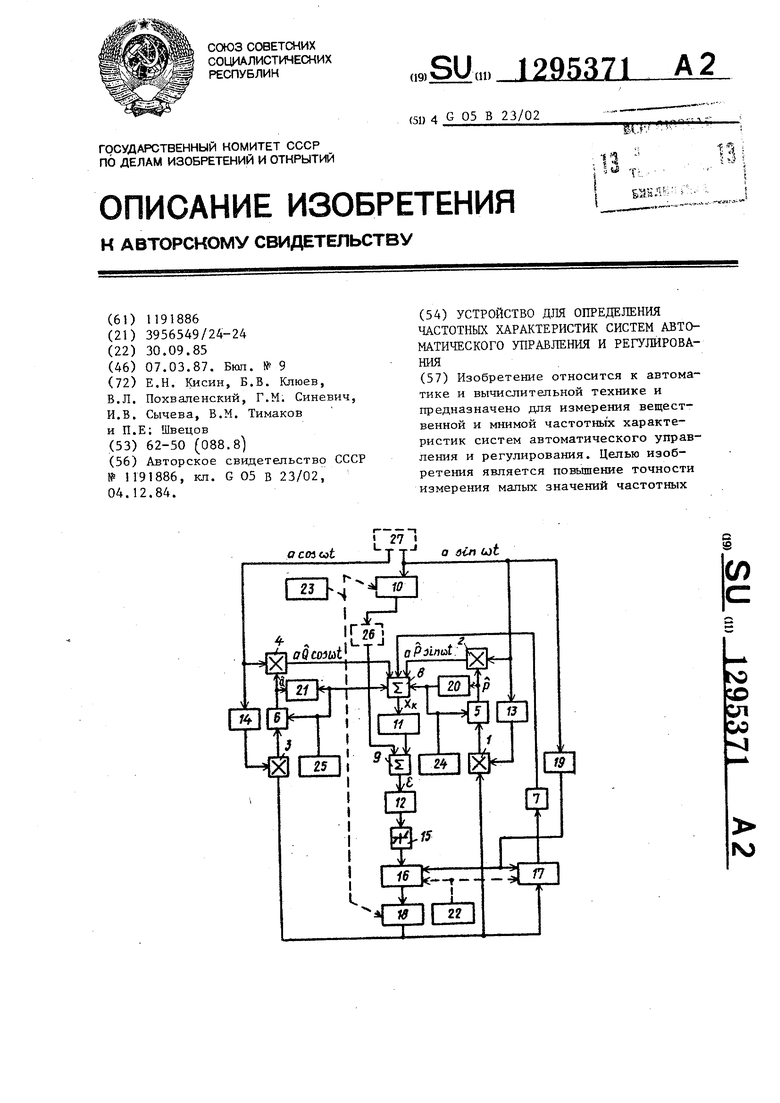
| Коммутатор для управления шаговым двигателем | 1984 |
|
SU1191886A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
