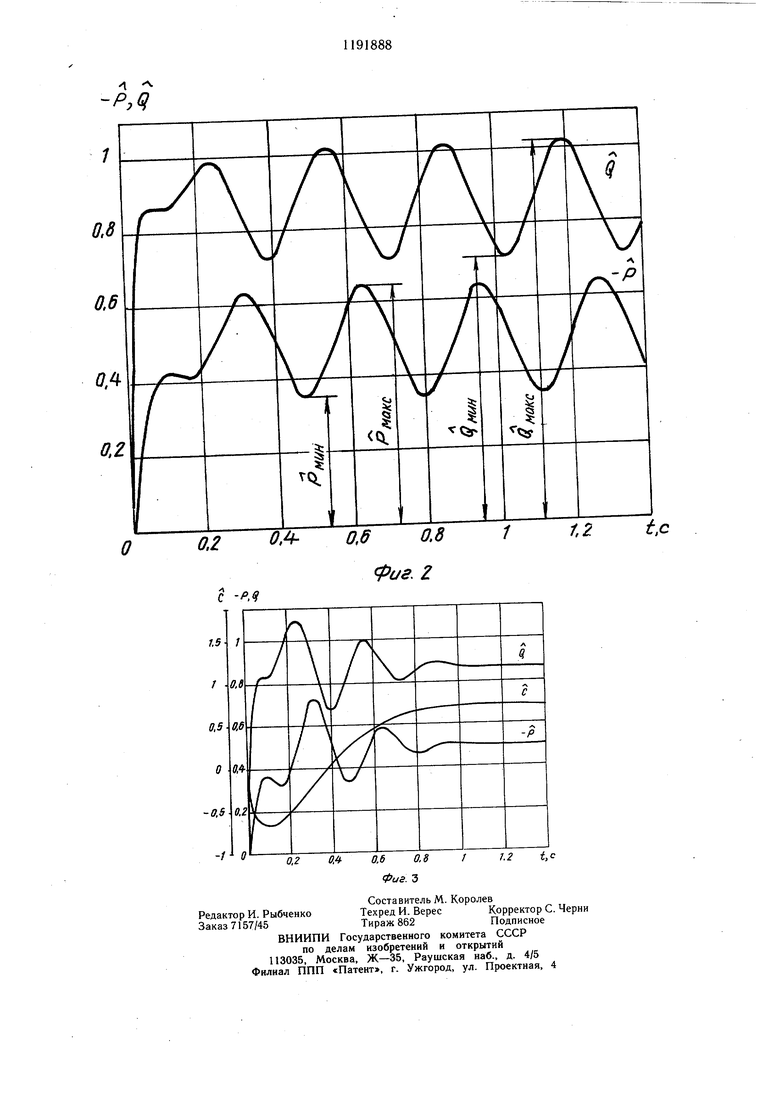
Изобретение относится к специализированным вычислительным устройствам для исследования и контроля систем автоматического управления и регулирования (САУ и Р) и предназначено для определения частотных характеристик (ЧХ) автоматических систем и их функциональных узлов. Целью изобретения является расширение области применения, улучшение помехозащищенности и повышение точности устройства. На. фиг. 1 приведена структурная схема устройства для определения частотных характеристик САУ и Р; на фиг. 2 и 3 - графики процессов подстройки идентификаторов ЧХ при отсутствии компенсации постоянной составляющей и при введении такой компенсации. Устройство содержит четыре множительных блока 1-4, три интегратора 5-7, два сумматора 8 и 9, два аттенюатора 10 и 11, три фильтра 12-14, блок 15- зоны нечувствительности, два блока 16 и 17 коррекции усиления, управляемый усилитель 18, датчик 19 частоты, два индикатора 20 и 21 и два элемента 22 и 23 управления. Кроме того, на фиг. 1 показана исследуемая САУ и Р 24 и генератор 25 синусоидальных колебаний. Вход исследуемой САУ и Р 24 соединен с выходом аттенюатора 10, а выход - с первым входом сумматора 9, выход которого через последовательно соединенные фильтр 12, блок 15 зоны нечувствительности, первый блок 16 коррекции усиления и управляемый усилитель, 18 подключен к первым входам первого и третьего множительных блоков и к первому входу второго блока 17 коррекции усиления, выход которого через интегратор 7 подключен к третьему входу сумматора 8. Выход множительного блока 1 через последовательно соединенные интегратор 5 и множитедьный блок 2 подключен к первому входу сумматора 8, выход множительного блока 3 через последовательно соединенные интегратор 6 и множительный блок 4 подключен к второму входу сумматора 8, выход которого через аттенюатор 11 соединен с вторым входом сумматора 9. Первый выход генератора 25 подключен к входу датчика 19 частоты, к второму входу множительного блока 2 и через фильтр 13 - к второму входу множительного блока 1 второй выход генератора 25 с фазой колебаний, отличной от фазы колебаний первого выхода на я/2, подключен к второму входу множительного блока 4 и через фильтр 14 - к второму входу множительного блока 3. Вход индикатора 20 соединен с выходом интегратора 5, а вход индикатора 21 - с выходом интегратора 6. Выход датчика 19 частоты соединен с вторыми входами блоков , 16 и 17 коррекции усиления, третьи входы которых соединены с выходом управляющего элемента 22, а управляющие входы аттенюаторов 10 и 11 и управляемого усилителя 18 соединены с выходом управляющего элемента 23. Принцип действия устройства основан на автоматической компенсации установившегося на выходе САУ и Р сигнала Хвых,Выходно ь сигнал исследуемой САУ и Р подается на первый вход сумматора 9, на второй вход которого поступает компенсационный сигнал, получаемый на выходе сумматора 8 путем сложения сигналов aPsinwt и aQcoswt, XK aPsin(ut4-aQcos(i)t. . При несовпадении оценок Р и Q с истинными значениями измеряемых ЧХ P(w) и Q(w ошибка е компенсации на выходе сумматора 9, не равная нулю, проходя через фильтр 12, блок 15 зоны нечувствительности, блок 16 коррекции усиления и управляемый усилитель 18, поступает на входы множительных блоков 1 и 3. В результате детектирования ошибки Б сигналами аАфХ X (ш)51п wt фр) и аА(1 (ш) cos wi -f- ср.}. X(iw), где Аф(ш) и (ff(w) амплитудночастотные характеристики фильтров 13 и 14, на выходах блоков 1 и 3 образуются сигналы, постоянные составляющие которых про порциональны р азностным ощибкам Рш - - Р и Qw - Q. Поступая далее на входы интеграторов 5 и 6, эти сигналы вызывают подстройку оценок Р (на выходе интегратора 5) и Q (на выходе интегратора 6), изменяя компенсационный сигнал Хк аР smwt - aQcoswi таким образом, чтобы уменьшить ошибку е компенсации вплоть до нуля. При обнулении ошибки е обнуляются детектирующие сигналц на входах интеграторов 5 и 6, и процессы измерения ЧХ на этом заканчиваются. Показания индикаторов 20 и 21 фиксируют в это время значения, равные значениямЧХ «сследуемой САУ и Р д р Р(ш); Q д(ш). Для обеспечения возможности изменения амплитуды синусоидального воздействия на входе САУ и Р в устройство введены аттенюатор 10, компенсирующий его влияние на невязку е аттенюатор 11, коэффициенты ослабления которых меняются идентично, и дополнительный сумматор 8. Учитывая, что сигнал на выходе САУ и Р с введением аттенюатора 10 изменяется в k раз (k - коэффициент ослабления аттенюатора) т. е. Хвых ak Р (а, w) smwi -(- Q (а, да)со5ш1 невязку можно записать в ,е е - ka(Psinwt + Qcoswt qk Pwsinwt - - Qwt coswt - - ak{Psinwt 4- Qcoswt ak{(Pw) - - P) sinwt + (Q(w) - 0) coswt,(1) откуда следует, что какова бы ни была амплитуда синусоидального воздействия на входе САУ и Р (т. е. каково бы ни было значение k), при равенстве нулю невязки е всегда соблюдаются равенства Р Р(а, w)- Q Q(a, w). Таким образом, благодаря введению в устройство двух синхронно работающих аттенюаторов оценки Р и Q ЧХ САУ и Р не зависят от амплитуды входного воздействия. . Однако изменение коэффициента k в этом случае приводит к изменению в k раз амплитуды ошибки е компенсации, что, в свою очередь, вызывает существенное ухудшение динамических свойств подстройки идентификаторов Р и Q. Для устранения влияния аттенюаторов на динамические характеристики устройства в него введен управляемый усилитель 18, коэффициент усиления которого изменяется обратно пропорционально изменению коэффициента k ослабления аттенюаторов (усилитель 18 может быть реализован, например, в виде операционного усилителя, в цепь обратной связи которого подключен аттенюатор, идентичный первым двум; при этом коэффициент усиления такого усилителя пропорционален величине 1/k). Для точной реализации соотношения (1) и стабилизации динамических свойств устройства необходимо обеспечить одновременное идентичное изменение коэффициентов ослабления аттенюаторов и обратное им изменение коэффициента усиления управляемого усилителя. Это достигается тем, что аттенюаторы 10 и 11 и усилитель 18 управляются одним и тем же управляющим элементом 23, реализуемым, например, в виде единой ручки строенного потенциометра.
С целью дополнительного повышения помехозащищенности в схему устройства в цепь после сумматора 9, на выходе которого формируется сигнал ошибки s компенсации, введен фильтр 12 (например, колебательное звено с передаточной функцией вида )
реализуемое на операционном усилителе с активно-емкостными обратными связями). Введение только одного этого фильтра в схему прототипа нарушило бы его работоспособность, так как невязка после фильтрации имеет вид е qA(w)(w} - P)sin(wt + фф) ()- Q cos(wt -f фф)},(2)
a детектирующие сигналы a mwi и acosoyt на вторых входах соответствующих множительных блоков 1 и 3 не изменялись бы аналогичным образом по фазе и амплитуде. Можно показать, что с ростом величины фф, которая изменяется в функции частоты w, динамика процессов идентификации ухудшается вплоть до потери устойчивости. Для устранения этих явлений в схему устройства введены дополнительные фильтры 13 и 14, обеспечивающие динамическую коррекцию детектирующих сигналов, аналогичную фазовым и амплитудным изменениями ошибки е компенсации во всем диапазоне частот ш. Схема фильтрации из трех фильтров обеспечивает работоспособность устройства в любом диапазоне частот. Именно такая схема фильтрации позволяет выбирать структуру и параметры фильтра 12 исходя только из условия гарантированного подавления помехи N(t)- УСТОЙЧИВОСТЬ процессов идентификации ЧХ САУ и Р обеспечивается автоматически с любыми типами фильтров.
Уменьшению влияния помех (в частности, нескомпенсированных высших гармоник) способствует также введение регулируемого блока 16 коррекции усиления. Как показывают исследования, нескомпенсированные высшие гармоники выходного сигнала существенно нелинейной САУ и Р приводят
0 к возникновению установившихся колебаний оценок F и О ЧХ около истинных значений. Амплитуда этих колебаний тем больше, чем больше уровень такого рода помехи и чем больше эквивалентный коэффициент усиления X в каналах автоматической
подстройки оценок Р и Q. Изменяя коэффициент усиления X, можно обеспечить необходимую точность определения ЧХ САУ и Р. Поскольку наличие тех или иных гармоник и их амплитуды определяются конкретныQ ми нелинейностями, содержащимися в исследуемой системе, необходимая коррекция коэффициента усиления может быть осуществлена оператором при работе с реальной САУ и Р. Блок 16 коррекции усиления, таким образом, должен, во-первых, как и множительный блок в прототипе, обеспечивать увеличение коэффициента пропорционально текущему значению w и, во-вторых, допускать регулировку коэффициента усиления оператором. Это расщиряет область применения устройства, позволяя исследовать существенно нелинейные САУ и Р и повышает точность определения ЧХ. Данный блок может быть выполнен, например, в виде последовательно соединенных множительного блока, осуществляющего пропорциональную коррекцию коэффициента X по частоте, и аттенюатора, предназначенного для произвольной регулировки коэффициента уси ления вручную. В случаях, когда к устройству в целом не предъявляется высоких требований по быстродействию идентифика
ции ЧХ, допустима упрощенная реализация блока коррекции усиления в виде последовательно соединенных аттенюаторов. Один из них служит для дискретной коррекции коэффициента усиления по диапазонам частот, на которые разбивается вся рабочая
S область частот устройства, а другой используется оператором для индивидуальной коррекции эквивалентного коэффициента усиления 1. Оператор в данном случае выполняет функции датчика частоты, переключая первый аттенюатор по диапазонам частот.
Влияние постоянной составляющей на точность получаемых результатов устраняется введением в устройство дополнительного контура компенсации, содержашего 5 интегратор 7 и блок 17 коррекции усиления. При этом алгоритм подстройки оценок ЧХ, который может быть получен градиентным методом, имеет вид
g(/) Kobsinwt, n(/) Ka&coswt,
л €()c-e(3)где С - сигнал на выходе интегратора 7, компенсирующий постоянную составляющую Со, присутствующую в ошибке е компенсации;
Яс -общий коэффициент усиления контура компенсации; е Xъ№s(t) - qPsinwt -г aQcoswt - С. (w) - P sinwt + (ay) - Q X
X coswt + Co - С.
При любых (Рц;), Q(UA) и Со ошибка компенсации будет тождественно равна нулю только при выполнение соотношений
Р Р(ш); 0 д(ш); & Со,(4)
т. е. настраиваемые по алгоритмам (3) параметры Р и Q действительно представляют собой оценки ЧХ, а величина постоянной составляющей Со компенсируется сигналом е.
Из графиков на фиг. 3 видно, что при наличии контура компенсации постоянной составляющей Со полностью устраняется влияние Со на работу устройства. Введение блока 17 коррекции усиления в цепь компенсации постоянной составляющей связано с обеспечением постоянных динамических свойств этого контура. Ликвидация постоянной составляющей Со в ошибке е компенсации, формирующейся на выходе сумматора 9, происходит в соответствии с передаточной функцией
Со(р) Тр+Г
- переменный эквивалентный коэффициент усиления каналов подстройки Р и Q, реализуемый блоком 16 коррекции усиления;
.: - коэффициент усиления блока 17 коррекции усиления.
Без блока 17 коррекции (когда А,с I) время «списывания постоянной составляющей Со зависит от переменного коэффициента усиления А,. при малых К оно может быть неоправданно большим и существенно увеличивать время, необходимое для определения ЧХ САУ и Р. Если же ввести блок 17 коррекции усиления и обеспечить изменение его коэффициента усиления Я,с обратно пропорционально коэффициенту усиления X в блоке 16, т. е. при
где Я,о const,
то постоянная времени Т становится постоянной
Т const.
.Ло
Это означает, что постоянная составляющая Со в ошибке е компенсации всегда устраняется за одно и то же заранее заданное время.
Блок 17 коррекции усиления может быть реализован, например, в виде операционного усилителя, в обратной связи которого установлены последовательно соединенные множительное устройство, другой вход которого соединен с датчиком частоты, и аттенюаQ тор, управляемый синхронно с аттенюатором в блоке 16 коррекции усиления одним и тем же элементом 22 управления. Элемент 22, . позволяющий оператору произвольно изменять коэффициент усиления Я, в контуре подстройки оценок ЧХ и обратно пропорционально ему коэффициент усиления Хс в блоке 17 коррекции усиления, может быть выполнен, например, в виде ручки сдвоенного потенциометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1339499A2 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1295371A1 |
| Адаптивный вычислитель частотных характеристик систем автоматического управления | 1980 |
|
SU1072004A1 |
| Самонастраивающаяся система регулирования | 1972 |
|
SU448432A1 |
| Устройство для определения частотных характеристик систем автоматического управления | 1980 |
|
SU892419A2 |
| Устройство для стабилизации положения плазменного шнура в токамаке | 1986 |
|
SU1418817A1 |
| Анализатор частотных характеристик | 1977 |
|
SU702352A1 |
| Автомат-настройщик двухконтурных систем регулирования с опережающим сигналом | 1987 |
|
SU1624245A1 |
| Частотомер | 1990 |
|
SU1721532A1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |

УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ, содержащее последовательно соединенные первый множительный блок, первый интегратор, второй множительный блок и первый сумматор, последовательно соединенные третий множительный блок, второй интегратор и четвертый множительный блок, выход которого соединен с вторым .входом первого сумматора, блок зоны нечувствительности, датчик частоты, первый индикатор, вход которого соединен с выходом первого интегратора, и второй индикатор, вход которого соединен с выходом второго интегратора, второй вход второго множительного блока и вход датчика частоты подключены к первому выхо-. ду генератора синусоидальных колебаний, а второй вход четвертого множительного блока соединен с вторым выходом генератора, отличающееся тем, что, с целью расширения области применения, улучшения помехозащищенности и повышения точности устройства, оно содержит первый аттенюатор, последовательно соединенные второй аттенюатор, второй сумматор и первый фильтр, последовательно соединенные первый блок коррекции усиления, управляемый усилитель, второй блок коррекции усиления и третий интегратор, а также первый и второй управляющие элементы, второй и третий фильтры, причем выход первого аттенюатора соединен с входом исследуемой системы, информационный вход - с первым выходом генератора синусоидальных колебаний управляющий вход - с выходом первого управляющего элемента, который соединен также с управляющим входом второго аттенюатора и вторым входом управляемого усилителя, вход второго аттенюатора соединен с выходом первого сумматора, а выход - с вторым входом второго сумматора, первый вход которого соединен с выходом исследуемой системы, выход первого фильтра соединен с входом блока зоны нечувствительности, выход которого соединен с первым входом первого блока коррекции усиления, второй вход последнего соединен с выходом датчика частоты, третий вход - с выходом второго управляющего элемента, соединенного также с третьим входом второго блока коррекции усиления, второй вход которого соединен с выходом датчика частоты, выход управляемого усилителя соединен с первыми входами первого и третьСО его множительных блоков, второй вход первого множительного блока соединен с выходом второго фильтра, вход которого соеас динен с вторым входом второго множитель00 ного блока, а второй вход третьего мнооо жительного блока соединен с выходом третьего фильтра, вход которого соединен с вторым входом четвертого множительного блока, выход третьего интегратора соединен с третьим входом первого сумматора.
| Адаптивный вычислитель частотных характеристик систем автоматического управления | 1980 |
|
SU1072004A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
