в виде пакета грушв, связанного трособлочнон системой с рукояткой, и средство для автоматического изменения преодолеваемой нагрузки. Последнее содержит два этажерочных каркаса 4 и 7 с окнами 1А на обращенных одна к другой сторонах. Каркас 4 под вижный и установлен между пакетом грузов и тросом, а каркас 7 установлен на основании. Оба каркаса снабжены шарнирными полками 8 и 10, установленными шарнирами встречно одна другой. В подвижном каркасе полки не связаны одна с другой а снабжены подпружиненными щечками 21 на их свободных конДах, выступающих из под вижного каркаса. В неподвижном каркасе полки 10 связаны одна с другой шарнирно общей тягой 12, выступающей из неподвижного каркаса. Полки обеих каркасов на их нижних упорах накло1
Изобретение относится к спортивным тренировочным устроР1ствам для развития и укрепления мускулов и может быть использовано как для общефизической подготовки физкультурни- ков, так и для тренировки спортсменов с
Цель изобретения - повышение эффективности тренировки заданной группы мышц с учетом усталости их в процессе выполняемого движения.
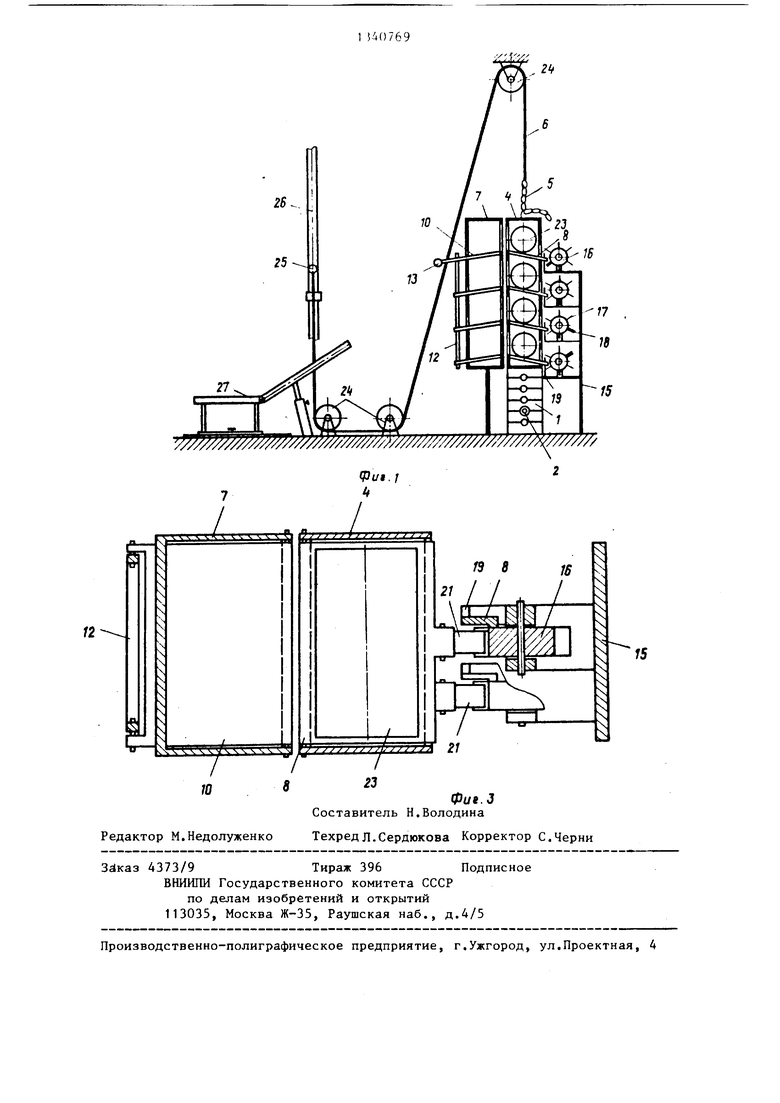
На фиг.1 изображено устройство, вид сбоку; на фиг.2 - средство для создания нагрузки, продольный разрез на фиг.З - то же, поперечный разрез.
Устройство содержит средство для создания нагрузки в виде пакета наборных грузов 1 с упорным штифтом 2 для установки в отверстиях центрального стержня 3 и средство для авто матического изменения преодолеваемой нагрузки, включающее подвижных каркас 4, прикрепленный к стержню 3 и связанный, например, через цепь 5 с тросом 6 выходного органа. С одной стороны рядом с подвижным каркасом 4 на высоте его нижнего опущенного положения установлен неподвижный каркас 7. Оба каркаса 4 и 7 выпол
нены этажерочного типа с шарнирными
40769
пены вниз и ориентирораны под противоположным углом к горизонтали. Подпружиненные щечки каждой полки подвижного каркаса сопряжены с выступами 17 своего поворотного программного колеса 16, снабженного пальпем 18, соприкасающимся с упором 19 на основании. На к; ждой полке подвижного каркаса свободно установлен грузовой цилиндр 23. При тренировке после завершения заданного цикла движения полки В подвижного каркаса 4 наклоняются в сторону неподвижного каркаса 7. Это происходит от зацепления пальца 18 колеса 16 за упор 19. В результате грузовой цилиндр 23 скатывается в неподвижный каркас. Нагрузка уменьшается на величину веса грузового цилиндра. Это позволяет тренировать мышцы чисто, как и при первом движении. 3 И.П.
5
15
0
5
0
полками 8, установленными шарнирами встречно одна другой. Шарнирные полки 8 подвижного каркаса, поворотные относительно своих осей 9, выполнены несвязанными одна с другой, а шарнир- лые полки 10 неподвижного каркаса, поворотные относительно осей 11, шарнирно связаны своими свободными концами с общей тягой 12, снабженной рукояткой 13, с образованием шарнирного многозвенника параллелограмма. В свободном положении полки 8 и 10 под собственным весом наклонены противоположно друг к другу от их осей поворота 9 и 11 во внешние стороны до упоров, выполненных на стенках каркасов 4 и 7. Между каркасами 4 и 7 над каждой парой полок 8 и 10 выполнены окна 14 на одинаковом уровне.
С другой стороны подвижного каркаса 4 на основании 15 на уровне каждой полки 8 установлены одинаковые программные колеса 16 с выступами 17 по их окружности и одним на колесо пальцем-стопором 18 с возможностью его сопряжения с выступом 19 на основании 15. На каждом колесе 16 имеется пружинный шариковый фиксатор 20 углового дискретного положения колеса 16.
На выступающих из подвижного каркаса 4 концах полок 8 установлены поворотные щечки 21, подпружиненные плоской пружиной 22 к верхнему упору полок 8, причем усилие пружин 22 выполнено меньшим, чем усилие пружин фиксаторов 20. Программные колеса 16 установлены с возможностью взаимодействия своими выступами 17 со щечками 21. Каждая пара щечки 21 - колеса 16 разнесены по горизонтали относительно одна другой (фиг.З).
В каркасе 4 на каждой полке 8 уложен грузовой цилиндр или шар 23 заданной массы.
Выходной орган, связанный с тросом 6, содержит обводные блоки 24, рукоять-перекладину 25, связанную с концом троса 6, установленную в своей направляющей 26. Выходной орган дополнен, например, скамейкой 27 Возможны и другие конструктивные выполнения вькодного органа в зависимости от вида и методики тренировки.
Устройство работает следующим образом.
Спортсмен задает минимальный желаемый вес груза пакета 1 местом установки штифта 2, программирует автоматический режим уменьщения нагрузки по желаемой циклограмме тренировки углом положения каждого из колес 16, поворачивая их вправо,, каждое на заданное количество щелчков фиксаторов 20, т.е. угла первоначального положения пальца 18. Все грузовые цилиндры 23 находятся в подвижном каркасе 4, дополняя своим суммарным весом минимальный груз пакета 1. Взаимодействуя руками с перекладиной 25 выходного органа (поднимая ее), спортсмен поднимает грузовой пакет 1 с подвижным каркасом 4.
При каждом поднятии подвижного каркаса 4 полки 8 остаются в нижнем положении из-за своего собственного веса и веса лежащего на каждой из них грузового цилиндра 23. При этом щечки 21, соприкасаясь снизу с выступами .17 колес 16, поворачиваются вниз, пропуская выступ, так как усилие пружинного фиксатора 20 больше усилия плоских пружин 22. При соскакивании щечек 21 с выступов 17 они занимают свое исходное положение, прижатое к верхнему упору полок В под действием плоских пружин 22.
5
407694
При обратном двпж€ нии каркаса 4 вниз каждая щечка 21 своей полки 8 взаим1)действует с выступом 17 своего колеса 16 (фиг. 2 и 3), поворачивая его на один шаг влево. Таким образом, калщое колесо 16 поворачивается на один шаг при каждом опускании каркаса 4, пока палец 18 данного колеса Q не упрется сверху в выступ 19 основания. При этом при продолжающемся опускании каркаса 4 конец со щечкой данной полки 8 остается на упоре 19, полка 8 поворачивается относительно g своей оси 9, изменяя угол наклона полки на обратный. Лежащий на этой полке грузовой цилиндр 23, прижатый первоначально правым наклоном полки к правой стенке каркаса 4, при
этом перекатится через окна 14 в
5
неподвижный каркас 7 и из-за левого наклона полки 10 прижмется к левой стенке каркаса 7. Вследствие этого суммарньБ вес подвижного каркаса умень- 5 шится на вес одного цилиндра.
Таким образом, в зависимости от запрограммированного первоначального угла положения пальца 18 каждого колеса 16 по окончании тем самым зап- Q рограммированного порядкового номера цикла поднятия-опускания, цилиндр 23 ячейки каркаса 4 перекатится в свою ячейку неподвижного каркаса 7 и на тросе остается только установленный минимальный вес пакета грузов 1.
Например, (фиг.1) после третьего цикла опускания груза и каркаса с суммарной массой М + 4 т, где М - масса пакета и каркаса, m - масса одного цилиндра, сработает пара: полка 8 - колесо 16 - выступ 18 нижней ячейки каркаса 4. Четвертый цикл выполняется с суммарной массой М + + 3 т, пятый М + 2- т, шестой М+т, седьмой и все последующие М. Свободные от грузов полки 8 при последующих опусканиях просто впустую поворачиваются вверх на установленных упорных пальцах 18 в упоры 19.
Чтобы вернуть все грузовые цилиндры 23 из неподвижного каркаса 7 в подвижный каркас 4 для следующей тренировки, достаточно поднять рукоятку 13 до упора и опустить обратно. При этом по физике работы шарнирного параллелограмма полки 10 изменят свой наклон на противоположный и все грузовые цилиндры 23 одновременно
0
5
0
перекатятся обратно в каркас 4 на свои полки 8 в свое первоначальное положение.
Ячейкой зацепления цепи 5 задают нижнее положение рукоятки-перекладины 25,
Количеством полок 8-10 каркасов и количеством выступов 17 на колесах 16 можно в широких пределах варьировать конструктив устройства как по диапазону изменения веса груза в процессе тренировки, так и по циклограмме, вплоть до одновременного перекатывания всех цилиндров после заданного числа циклов подъема..
В устройстве реализован режим автоматического изменения веса грузов в процессе тренировки в сторону его уменьшения по любой желаемой программе от цикла к циклу. Вследствие этого повышена эффективность тренировки, чистота выполнения движений в каждом его цикле, как в первые циклы движения, так и во всех последующих циклах по мере уставания спортсмена. Это свидетельствует о более оптимальном режиме тренировки. В таком режиме тренировки спортсмен выполняет большее число подъемных движений в течение одной тренировки с максимально ощущаемой нагрузкой при каждом движении.
Устройство не критично к высоте подъема груза и к длине рук спортсмена, так как все переключения происходят в нижнем, точно определенном
1340769fi
положении грузов и сопряженных с ним положением неподнижных .
10
15
20
25
30
35
Формула изобретения
Устройство для тренировки мышц, содержащее установленное на основании средство для создания нагрузки в виде пакета грузов и связанный с ним выходной орган в виде трособлоч- ной системы с рукояткой, отличающееся тем, что, с целью noBbmie- ння эффективности тренировки заданной группы мышц с учетом усталости их в процессе выполняемого движения, оно снабжено средством для автоматического изменения преодолеваемой нагрузки, включающим два параллельно установленных каркаса, на обращенных одна к другой сторонах которых выполнены вертикальные ряды соосных окон и шарнирно установлены никлонные полки с уклоном на внешние стороны, грузовые цилиндры и вертикальный ряд программных колес с радиальными выступами и пальцем-стопором для взаимодействия с упором основания, при этом один из каркасов смонтирован на пакете грузов, грузовые цилиндры размещены на его полках, последние снабжены подпружиненными щечками для взаимодействия с выступами колес, другой каркас смонтирован на основании, а внешние концы его полок связаны шарнирно между собой посредством вертикальной тяги с рукояткой.
Формула изобретения
Устройство для тренировки мышц, содержащее установленное на основании средство для создания нагрузки в виде пакета грузов и связанный с ним выходной орган в виде трособлоч- ной системы с рукояткой, отличающееся тем, что, с целью noBbmie- ння эффективности тренировки заданной группы мышц с учетом усталости их в процессе выполняемого движения, оно снабжено средством для автоматического изменения преодолеваемой нагрузки, включающим два параллельно установленных каркаса, на обращенных одна к другой сторонах которых выполнены вертикальные ряды соосных окон и шарнирно установлены никлонные полки с уклоном на внешние стороны, грузовые цилиндры и вертикальный ряд программных колес с радиальными выступами и пальцем-стопором для взаимодействия с упором основания, при этом один из каркасов смонтирован на пакете грузов, грузовые цилиндры размещены на его полках, последние снабжены подпружиненными щечками для взаимодействия с выступами колес, другой каркас смонтирован на основании, а внешние концы его полок связаны шарнирно между собой посредством вертикальной тяги с рукояткой.
27
2if
/5
fPui.f
ff
&
b
12
I
ю
}j}f}}t} }}.
а р/
/ вгз
Фие, J
Составитель Н.Володина
Г5
а р/
Редактор М.Недолуженко Техред л.Сердюкова Корректор С.Черни
Зйказ 4373/9Тираж 396 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой тренажер | 1990 |
|
SU1780777A1 |
| ТРЕНАЖЕР | 1991 |
|
RU2015705C1 |
| Нагрузочный узел спортивного тренажера | 1987 |
|
SU1443898A1 |
| ТРЕНАЖЕР | 1991 |
|
RU2016599C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2012 |
|
RU2516014C1 |
| Устройство для развития силы мышц ног | 1986 |
|
SU1389789A2 |
| ТРЕНАЖЕР | 2000 |
|
RU2167690C1 |
| Устройство для развития мышечно-связочного аппарата верхних конечностей скалолаза | 2021 |
|
RU2767689C1 |
| Тренажер гребца "Турист | 1987 |
|
SU1498521A1 |
| Устройство для развития силы ног | 1990 |
|
SU1768191A1 |
Изобретение позволяет повысить эффективность тренировки заданной группы мышц с учетом усталости их в процессе выполняемого движения. Устройство содержит основание, несущее средство для создания нагрузки W § (Л со О5 со Фиг. 2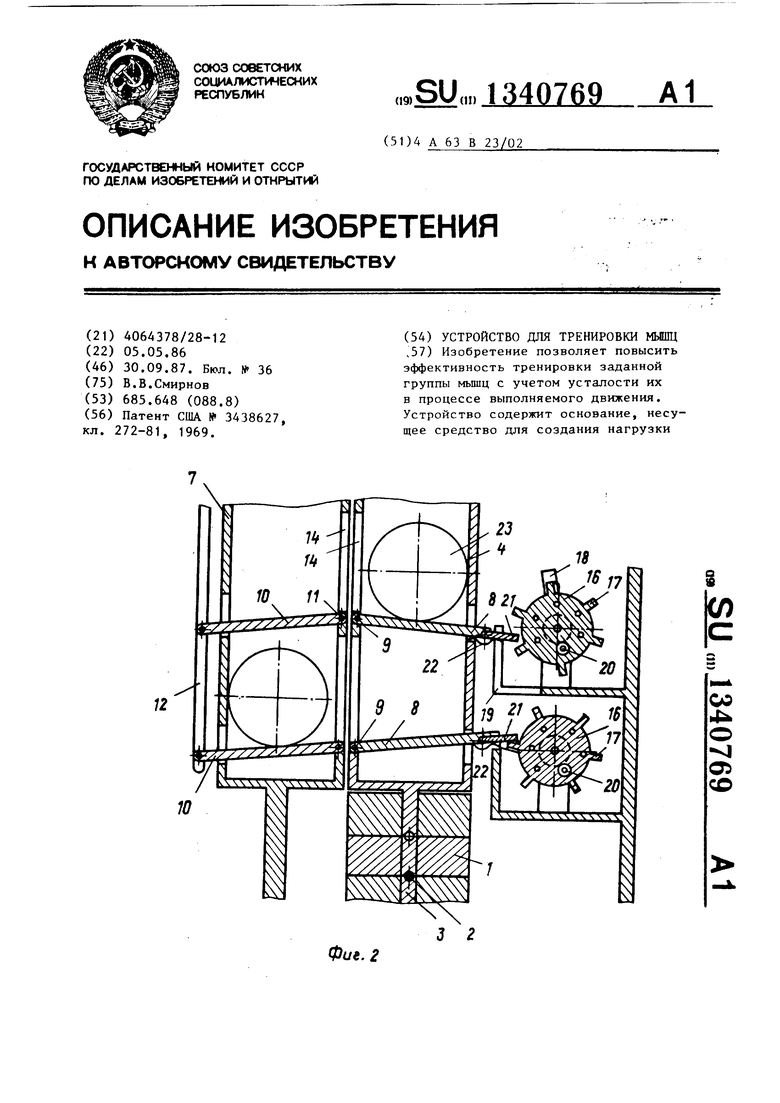
| Патент США № 3438627, кл | |||
| Паровоз с приспособлением для автоматического регулирования подвода и распределения топлива в его топке | 1919 |
|
SU272A1 |
