Изобретение относится к системам управления работой грузоподъемных механизмов.
Целью изобретения является обеспечение плотной автоматической многослойной укладки троса на барабан лебедки.
На чертеже представлена функциональная схема системы управления работой лебедки.
Система содержит каретку 1 с направляющим желобом 2 и датчиком 3 натяжения. В конце желоба с правой и левой стороны от проходяндего по нему кабеля установлены датчики 4 и 5 давления. Каретка 1 установлена на ходовом винте 6 с возможностью перемещения вдоль образующей барабана 7 лебедки влево и вправо при вращении винта соответственно по часовой и против часовой стрелки. Вращение винта производится приводом 8 управления работой укладчика. Управление приводом 8 осуществляет блок 9 управления. Система также содержит концевые выключатели 10, которые выдают сигналы блоку 9 управления при достижении кареткой правой или левой реборд барабана 7 лебедки. Датчик 3 натяжения обеспечивает выдачу информации о натяжении кабеля на блок 9 управления. Информацию о направлении вращения барабана 7 лебедки выдает привод 11 управления работой барабана лебедки.
Устройство функционирует следующим образом.
После включения системы блоку 9 управления задают направление движения каретки 1. После начала движения кабеля информация, выдаваемая датчиками 4 и 5 давления, указывает i то, в какую сторону искривляется кабель и какова степень этого искривления. Так, при наматывании кабеля на барабан 7 слева направо кабель искривляется влево вследствие упора в предыдущий виток, намотанный на барабан, и в край желоба 2, в котором установлен датчик 5 давления. При этом датчик 5 давления выдает величину этого давления, датчик 4 - нулевую величину давления, кроме того, величина давления, выдаваемая датчиком 5, тем больше, чем больще степень искривления каната.
Если же канат наматывается на барабан 7 лебедки справа налево, то при искривлении каната вправо вследствие упора в последний намотанный виток и в ту сторону желоба 2, где расположен датчик 4, показания этого давлс- ия выдает датчик 4, а датчик 5 - нулевые показания.
Таким образом, если на.матывание каната на барабан производится, например, слева направо, то для обеспечения плотной намотки кабеля на барабан блок 9
0
5
0
5
0
5
управления воздействует на привод 8 управления работой укладчика таким образом, чтобы датчик 5 выдавал величину давления, соответствуюн;ую искривлению кабеля влево на 10-20% от его диаметра.
Величина искривления 10-20% выбирается из соображений обеспечения плотного прилегания наматываемого троса к последнему уложенному витку, но при этом должна быть исключена возможность соскакивания наматываемого витка и его наброс на предыдущий виток. Вследствие этого искривление более 50% от диаметра недопустимо.
При продолжении вращения барабана лебедки в том же направлении и достижении кареткой 1 концевого выключателя 10 правой реборды барабана и включении его кареткой блок 9 управления изменяет направление вращения ходового винта, а значит, и направление укладки кабеля. -При этом ходовой винт вращается с такой скоростью, чтобы датчик 4 выдавал величину давления, соответствующую искривлению кабеля вправо на 10-20% от его диаметра.
Процесс продолжается аналогично и при достижении кареткой 1 концевого выключателя 10 левой реборды барабана. Таким образом, происходит цикл прохода укладчика слева направо и обратно.
Датчик.3 натяжения обеспечивает выдачу информации в блок 9 управления о величине натяжения троса, на.матываемого на барабан лебедки. Величина натяжения троса необходима для вычисления степени искривления каната по показаниям датчиков 4 и 5 давления.
Формула изобретения
Система управления работой лебедки, содержащая приводы управления работой барабана лебедки и укладчика, ходовой винт,
0 кинематически связанный с приводом укладчика, каретку с направляющим желобом и возможностью перемещения посредством ходового винта, а также концевые выключатели, отличающаяся тем, что, с целью обеспечения надежной плотной автоматичес5 кой многослойной укладки кабеля на барабан лебедки, система снабжена датчиками давления, размещенными в направляющем желобе, датчиком натяжения кабеля и блоком управления, к входам которого подключены выходы датчиков давления, привод управления работой барабана лебедки, выход датчика натяжения кабеля и концевые выключатели, а выход блока управления подключен к приводу управления работой укладчика.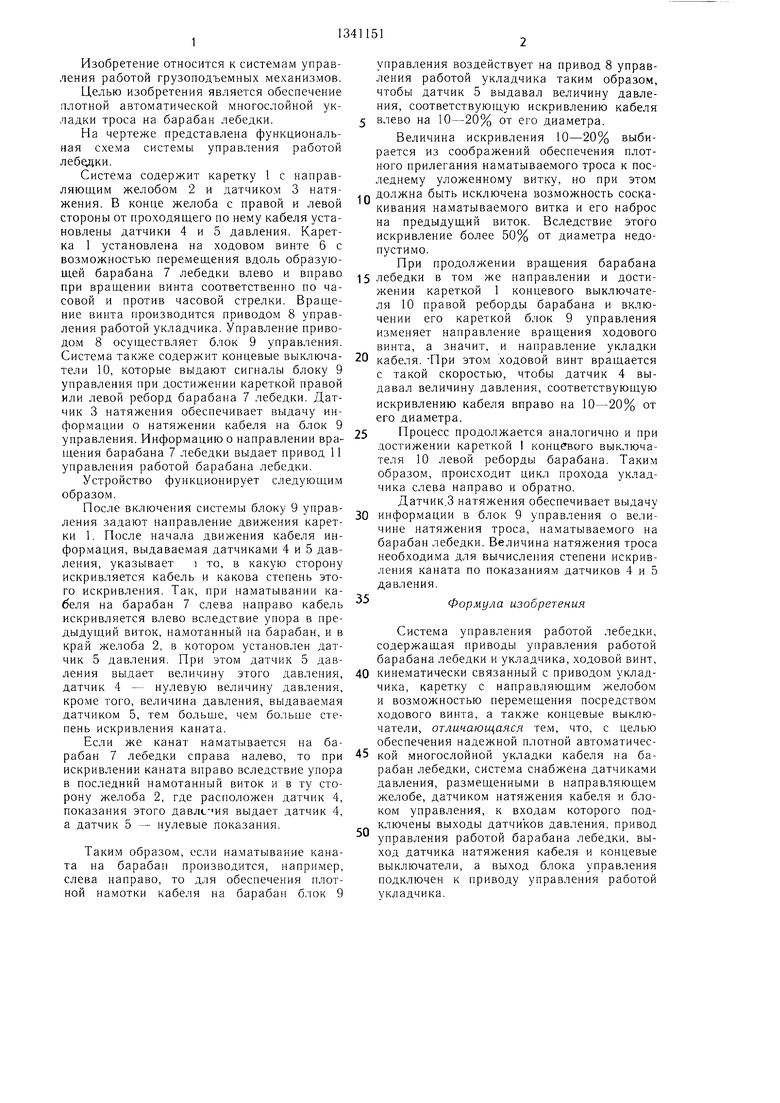
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления работой лебедки | 1987 |
|
SU1521710A2 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| Кабель-канатный укладчик | 1970 |
|
SU446464A1 |
| Система автоматической намотки-размотки кабеля привязных БПЛА | 2023 |
|
RU2819974C1 |
| ЛЕБЕДКА ДЛЯ ЗВУКОВОГО ОБОРУДОВАНИЯ | 2019 |
|
RU2731014C1 |
| СТАЦИОНАРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС | 2005 |
|
RU2300479C2 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Канатоукладчик | 1976 |
|
SU596537A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ТРАЛА НА БАРАБАН ЛЕБЕДКИ | 1992 |
|
RU2007915C1 |
| УСТАНОВКА НАМОТКИ-ВЫМОТКИ И ОБОГРЕВА КАБЕЛЯ ПОГРУЖНЫХ ЭЛЕКТРОНАСОСОВ | 1999 |
|
RU2172870C2 |
Изобретение относится к системам управления работой грузоподъемных механизмов. Цель изобретения - обеспечение надежной плотной автоматической многослойной укладки кабеля на барабан лебедки. Система содержит привод 11 управления работой барабана 7, ходовой винт 6, кинематически связанный с приводом 8 управления работой укладчика кабеля лебедки, каретку 1, перемещающуюся при помощи ходового винта 6, блок 9 управления (БУ), датчики 4 и 5 давления, размещенные в направляющем желобе 2 каретки 1, датчик 3 натяжения и концевые выключатели 10. К входам БУ подключены выходы датчиков 4, 5 и 3, привод 11 и концевые выключатели 10, а выходы БУ подключены к приводу 8. Датчики давления обеспечивают непрерывное слежение за плотностью прилегания укладываемого витка к последнему уложенному витку, а БУ 9 позволяет реализовать гибкое управление процессом перемещения каретки 1 с кабелем. 1 ил. S (О ОО N ел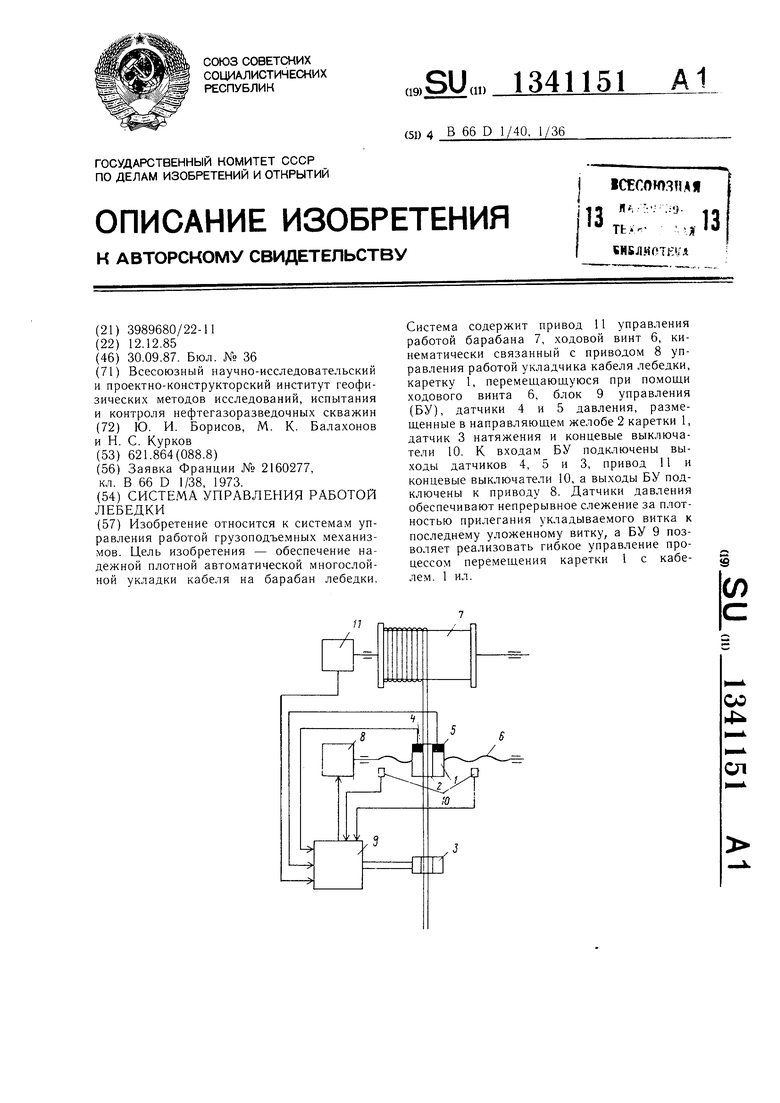
| АНСА-ЦИРКОНОЦЕНЫ, ФУНКЦИОНАЛИЗИРОВАННЫЕ ПО ЦИКЛОСИЛАНОВОМУ МОСТИКУ, И СПОСОБ ИХ ПОЛУЧЕНИЯ | 1999 |
|
RU2160277C1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
