Изобретение относится к технологическому оборудованию для автоматической намотки-размотки кабеля на барабан с дальнейшим использованием кабеля для привязи беспилотных летательных аппаратов.
Аналогом выделено техническое решение № PCT/KR2019/016431 Наземная станция для поддержки привязанного дрона и системы привязанного дрона. Заявитель Manmullab, Южная Корея. Наземная станция для поддержки привязанного беспилотного летательного аппарата и система привязанного беспилотного летательного аппарата содержат: блок питания для подачи питания на привязанный беспилотный летательный аппарат через кабель; блок управления натяжением для регулировки натяжения троса путем наматывания или разматывания троса; направляющею для направления кабеля до заданной точки; наземный блок связи с привязанным дроном по кабелю; и блок управления, который управляет блоком питания, чтобы управлять подачей энергии на привязной беспилотный летательный аппарат через кабель, и который контролирует натяжение кабеля через блок управления натяжением, при этом направляющая кабеля включает в себя направляющий вал для направления троса до заданной высоты с помощью блока управления натяжением. Содержит блок управления натяжением, который может наматывать или разматывать трос с катушки и может быть реализован в форме цилиндрического стержня, который соединяет привязанный дрон и наземную станцию.
Недостатком является, несмотря на блок управления натяжением, отсутствие датчика натяжения кабеля, подающегося к БПЛА, и не допускающего провисаний или рывков кабеля. Недостатком является неподвижность катушки, отвечающей за намотку-размотку кабеля на барабан, из-за чего существует вероятность отклонения от заявленной послойной намотки, а также износ кабеля ввиду постоянного изменения угла намотки.
Известно техническое решение RU 183808 U1 Устройство для намотки-размотки на барабан кабеля-привязи беспилотного летательного аппарата. Устройство расширяет арсенал технических средств, используемых для намотки-размотки на барабан, путем расширения их функциональных возможностей и обеспечения в процессе размотки-намотки передачу по кабелю-привязи напряжения питания, а также передачу и получение информационных сигналов, которые, связаны со свободной длиной кабеля-привязи (высотой подъема беспилотного летательного аппарата и программой его использования). Устройство для намотки-размотки на барабан кабеля-привязи беспилотного летательного аппарата совместно с барабаном содержит привод (мотор и муфту) вращения оси барабана, выполненной с возможностью закрепления на ней барабана, имеющего параллельные боковые ограничители, между которыми выполнена цилиндрическую часть, предназначенная для размотки с нее и намотки на нее кабеля-привязи. Содержит также привод вращения оси укладчика кабеля-привязи на барабан, установленной параллельно оси барабана и выполненной с возможностью закрепления на ней укладчика кабеля-привязи в виде каретки, выполненной с возможностью двунаправленного перемещения по оси укладчика и равномерной послойной подачи кабеля-привязи на цилиндрическую часть барабана. Устройство имеет контактное кольцо, установленное неподвижно на оси барабана, выходные контакты силовых и сигнальных жил располагаются на параллельных боковых ограничителях барабана.
Недостатком аналога является питание через сигнальные жилы, выведенные на внешнюю сторону бокового ограничителя барабана, соответственно вместе с вращением барабана, будет происходить и вращение жил, что подвергает их износу и запутыванию. Также недостатком является то, что заявленное в техническом результате расширение функциональных возможностей не включает функцию считывания информации о работе устройства для его дальнейшей автоматизации.
Известно решение JSR-JZ-FE0206-200, доступное для покупки и используемое для автоматизированного управления кабелем для транспортных средств или других целей. Устройство может контролировать скорость и длину выдвижного кабеля с помощью подключенного компьютера и соответствующих команд. Катушка кабеля может непрерывно передавать сигналы, ток при вращении и может автоматически регулироваться напряжением замкнутой петли, когда скорость размотки кабеля не совпадает. Предусмотрена динамическая обратная связь скорости вращения и другой информации на хост-компьютер. Устройство имеет кнопки для экстренного выключения и управления, а также датчик натяжения.
Недостатком устройства является размещение датчика натяжения, отмеченное неявно в составе устройства – при нахождении на устройстве подачи кабеля такой датчик не обладает достаточным спектром информации, поскольку при взлете-посадке БПЛА кабель может располагаться вертикально и горизонтально, из-за чего корректировка частоты вращения барабана может излишне дергать БПЛА, либо напротив допускать временные провисания кабеля.
Прототипом выделено устройство с полиспастом для подачи силового кабеля на привязной беспилотный летательный аппарат (RU 2791943). В устройство с полиспастом для подачи силового кабеля на привязной БПЛА введены дозированная нагрузка, лебедка с контроллером, клюз вывода кабеля, ремень и преобразователь. Вал электропривода ремнем соединен со шкивом барабана лебедки, осуществляющего смотку/размотку кабеля, закрепленного началом на барабане. Кабель огибает желоба неподвижного и подвижного роликов полиспаста и проходит через отверстие клюза. Конец прошедшего через отверстие клюза кабеля подключен к расположенному на раме БПЛА преобразователю, ось подвижного ролика через дозированную нагрузку соединен с чувствительным элементом датчика, служащего для определения положения подвижного ролика и передачи информации контроллеру лебедки, корпус датчика, клюз и ось неподвижного ролика закреплены на раме лебедки. Когда платформа с беспилотным аппаратом снижается, барабан продолжает вращение, подвижный ролик за счет укорочения ветви кабеля поднимается до максимальной высоты, и датчик дает команду контроллеру о наступлении режима равновесия. Если аппарат из-за дрейфа поднимается выше, кабель натягивается и подвижный ролик полиспаста, преодолевая массу дозированной нагрузки, переходит в зону размотки, и контроллер дает команду лебедке на разматывание кабеля с увеличением скорости в зависимости от изменения амплитуды отклонения от рабочей высоты. Если аппарат спускается вниз из-за дрейфа, кабель ослабляется, и подвижный ролик под действием дозированной нагрузки переходит в зону намотки, и контроллер дает команду лебедке на наматывание кабеля с увеличением скорости в зависимости от изменения амплитуды от рабочей высоты. Заявленное решение компенсирующего рывковую подачу кабеля в момент его сильного послабления/натяжения на основе буферного накопления кабеля на барабан лебедки, компенсирующего рывковую подачу кабеля в момент его сильного послабления/натяжения.
Недостатком является осуществление работы полиспаста и дозированной нагрузки, для которых нужно жесткое вертикальное и горизонтальное основание; в условиях работы с БПЛА для осуществления данного решения потребуется дополнительная конструкция и ее реализация в условиях открытого пространства для работы с БПЛА. Питание барабана осуществляется через разъем контактного кольца и наземного источника питания посредством кабеля на барабане, что является недостатком, т.к. при вращении барабана нет гарантий сохранности кабеля.
Технический результат, заявляемого изобретения, заключается в обеспечении плавной подачи кабеля к БПЛА и его корректировки на протяжении всей работы летательного аппарата, предупреждении запутывания и дестабилизацию БПЛА из-за натяжения кабеля, а также в обеспечении стабильной работы кабеля, без движения питающего провода при движении барабана.
Технический результат достигается тем, что система автоматической намотки-размотки кабеля привязных БПЛА содержит:
- энкодер с помощью которого считывается угол подачи кабеля, и подает эту информацию на вычислительный блок;
- частотный преобразователь, регулирующий работу мотора в зависимости от информации на вычислительном модуле;
- датчик вращения с флагом, отсчитывающий обороты барабана и передающий соответственную информацию на вычислительный модуль;
- драйвер шагового двигателя, считывающий движения клюза на шариковинтовой передаче и его положении относительно концевых выключателей, передающий эту информацию в вычислительный модуль;
- вычислительный модуль принимающий и обрабатывающий приходящие сигналы, поступающие от энкодера, частотного преобразователя, датчика вращения, драйвера шагового двигателя, и, на основе получаемой информации, корректирует работу системы, осуществляет корректировку натяжения кабеля, тем самым, не допуская дестабилизации БПЛА;
- шкив, расположенный на металлической раме и подающий кабель к БПЛА;
- токосъемник обеспечивающий питанием кабель наматываемый на барабан и подаваемый к БПЛА без вращения питающего провода внешнего источника питания при движении барабана.
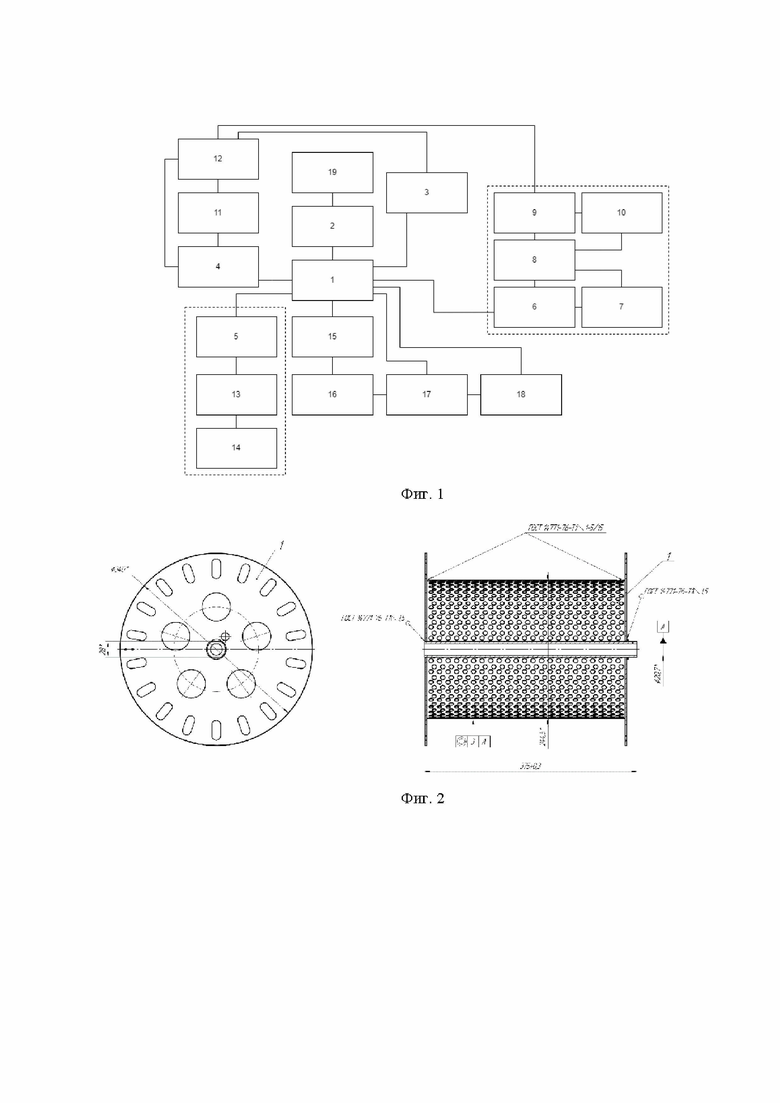
Система автоматической намотки-размотки кабеля привязных БПЛА содержит элементы, обеспечивающие автоматизацию и плавную размотку-смотку кабеля. На фиг. 1 показана структурная схема устройства, содержащая: барабан с боковыми ограничителями 1, токосъемник 2, датчик вращения с флагом 3, мотор с редуктором 4, прижимной ролик 5, шариковинтовая передача (ШВП) – 6, клюз 7, шаговый двигатель 8, драйвер шагового двигателя 9, концевые выключатели 10, частотный преобразователь 11, вычислительный модуль 12, металлическую конструкцию для прижимного ролика 13, пружины для регулировки металлической конструкции 14, металлическое основание 15, раму 16, энкодер 17, шкив 18.
На фиг.2 изображен барабан с боковыми ограничителями 1 в разрезе.
На фиг.3 изображен барабан 1 на металлическом основании 15 для намотки-размотки кабеля; содержащий драйвер шагового двигателя 9, клюз 7, ШВП 6, концевые выключатели 10, обеспечивающие плавную намотку-размотку кабеля с барабана и на барабан; металлическую конструкцию для прижимного ролика 13, пружины для регулировки металлической конструкции 14, обеспечивающие кладку кабеля на барабан и мотор с редуктором 4.
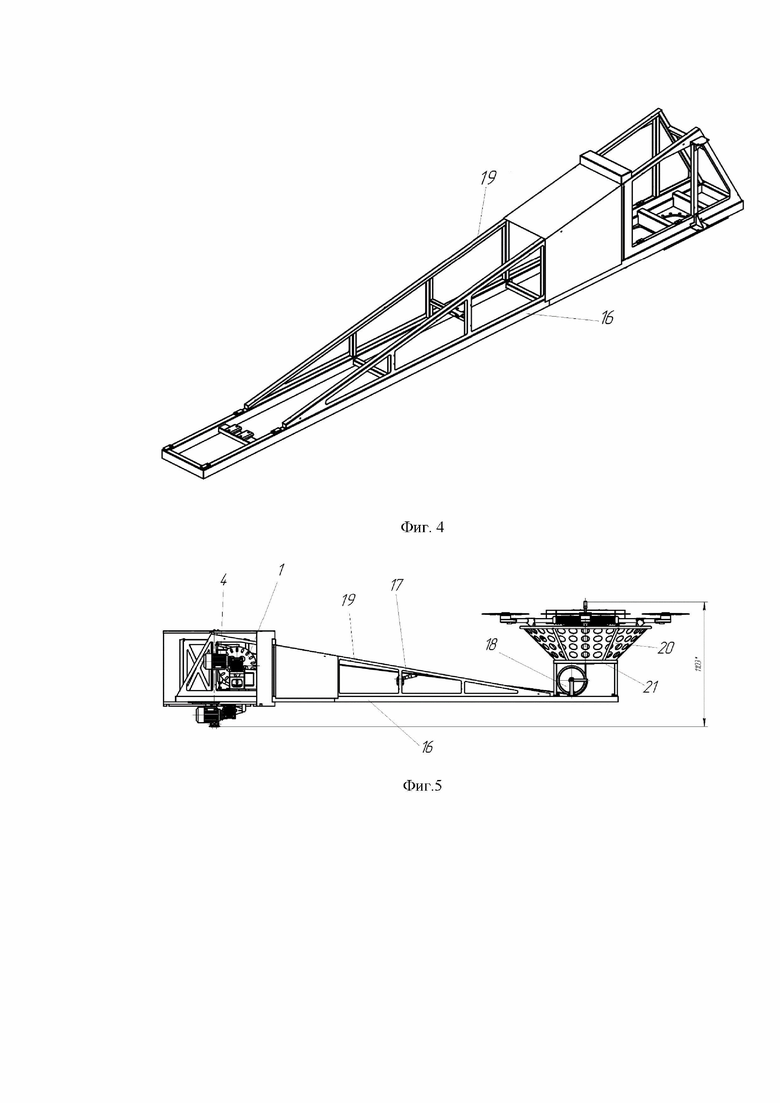
На фиг.4,5 изображена рама 16, для закрепления на ней барабана на металлическом основании 1 (15), шкива 18, энкодера 17. Рама может быть выполнена с дополнительными боковыми стенками 19, прямоугольной конструкцией 21, для дальнейшего размещения на ней площадки для посадки БПЛА 20.
Система автоматической намотки-размотки кабеля привязных БПЛА содержит: металлическое основание 15 (фиг.3), на котором расположен барабан шириной 375 мм с боковыми ограничителями 1 (фиг.2) (ширина барабана обусловлена тем, что тепловыделение кабеля 175 м, с учетом КПД составит порядка 800 Вт, которые необходимо рассеять во избежание перегрева, деформации и потери работоспособности кабеля); параллельно барабану, сверху, расположен прижимной ролик 5, на металлической конструкции 13 (фиг.3), регулирующийся пружинами 14 и обеспечивающий послойную намотку кабеля, без запутывания и наложения; датчик вращения с флагом 3, находящийся рядом с боковым ограничителем барабана, отсчитывающий обороты и отправляющий соответствующую информацию на вычислительный модуль 12; токосъемник 2 и мотор с редуктором 4 (фиг.3), обеспечивающие питание барабана и системы в целом; частотный преобразователь 11, который в совокупности с вычислительным модулем 12 изменяет частоту вращения барабана и намотки-размотки кабеля соответственно; ШВП 6, между концевыми выключателями 10 перемещается клюз 7 с помощью шагового двигателя 8, клюз перемещается согласно диаметру кабеля и оборотам барабана с помощью драйвера шагового двигателя 9, что в совокупности обеспечивает равномерную подачу кабеля от барабана к энкодеру 17 (фиг.5), а затем к БПЛА через шкив 18; раму 16 на которой с одной стороны закреплено металлическое основание с барабаном 1, 15, а на противоположной – шкив 18, обеспечивающий равномерную подачу кабеля к БПЛА; посередине рамы расположен энкодер 17, контролирующий натяжение кабеля; вычислительный модуль 12 принимает приходящие сигналы от элементов устройства, обрабатывает и корректирует работу мотора с редуктором и барабана 1, 4.
Изобретение работает следующим образом, система автоматической намотки-размотки кабеля привязных БПЛА с энкодером наматывает на цилиндр барабана 1 (фиг.2) кабель до 200 м, который затем проходит через клюз 7 (фиг.3), энкодер 17 (фиг.5), шкив 18, под соединяясь к БПЛА и обеспечивая его питанием, обеспечивая плавную корректировку длины кабеля и стабильную работу БПЛА соответственно. Вращение барабана 1 происходит с помощью мотора с редуктором 4 (фиг.3); частота мотора и вращение катушки барабана корректируется с помощью частотного преобразователя 11 и вычислительного модуля 12. Над барабаном 1 (фиг.3), параллельно ему, расположен роликовый прижим 5 на металлической конструкции 13, регулирующийся пружинами 14, обеспечивающий послойную укладку кабеля ряд к ряду; роликовый прижим 5 соответствует ширине барабана 1 и расположен между его боковыми ограничителями. Питание кабеля для дальнейшего подключения к БПЛА осуществляется с помощью токосъемника 2; запитываемого проводом от наземного источника питания (на рисунке не показан); провод передает напряжение; токосъемник 2 позволяет не допустить вращение питающего провода вместе с барабаном 1. Кабель намотанный на катушку барабана проходит через клюз 7 (фиг.3), расположенный параллельно барабану на ШВП 6 и перемещающийся на ней, согласно вращению барабана, на диаметр кабеля, от левого крайнего положения, до правого крайнего положения (между концевыми выключателями 10, также регулирующими передвижение клюза); перемещение клюза 7 осуществляется с помощью шагового двигателя 8, управление перемещением клюза по ШВП 6 происходит с помощью концевых выключателей 10 и шагового двигателя 8 в совокупности с драйвером шагового двигателя 9, флагом датчика вращения 3 и вычислительным модулем 12 следующим образом: клюз 7 перемещается по ШВП 6 с помощью шагового двигателя 8, взаимодействующего с драйвером шагового двигателя 9; информация с концевых выключателей 10 поступает в драйвер 9, и, вместе с информацией с флага 3, поступает на вычислительный модуль 12, который корректирует и задает работу шагового двигателя 8 и перемещение клюза 7 соответственно. Когда барабан 1 делает один оборот, датчик вращения с флагом 3 передает информацию на вычислительный модуль 12, вычислительный модуль передает информацию через драйвер шагового двигателя 9 в шаговый двигатель 8 и клюз 7 перемещается по ШВП 6 на диаметр кабеля. От клюза 7 (фиг.3) кабель проходит к энкодеру 17 (фиг.5), контролирующему натяжение кабеля; в энкодере задан нулевой угол, по которому устройство определяет, как корректировать положение посредством обратной связи с вычислительным модулем 12 путем передачи сигналов: при взлете БПЛА кабель будет натягивается, а при посадке или снижении опускаться, соответственно энкодер 17 считывает угол и корректирует натяжение кабеля обеспечивая плавную подачу, смотку кабеля и стабильную работу БПЛА соответственно. От энкодера 17 кабель проходит через шкив 18 (фиг.5), обеспечивая его плавное движение и дальнейшее подключение к БПЛА. Вычислительный модуль 12 представляет собой программируемое реле ПР102-24.2416.06.2, имеющее 40 аналоговых и дискретных выходов; модуль принимает поступающую информацию от датчика вращения с флагом 3, энкодера 17, концевых выключателей 10, драйвера шагового двигателя 9, частотного преобразователя 11, обрабатывает и исходя из получаемой информации корректирует работу системы: скорость вращения барабана 1, перемещение клюза 7, натяжение кабеля.
Таким образом, обеспечивается автоматизированная смотка-размотка кабеля БПЛА с системой против запутывания и наложения кабеля, а также дальнейшая плавная корректировка уровня натяжения и подачи кабеля для бесперебойной работы БПЛА и его неограниченного времени зависания в воздухе, а также удобного взлета-посадки и управления.
Рама 16 (фиг.4) может быть выполнена в виде рельсы, либо в виде металлического основании, на котором закрепляются части системы намотки-размотки кабеля БПЛА. Рама может быть выполнена с дополнительными боковыми стенками 19 (фиг 4,5), для большей надежности и усиления конструкции. Рама может быть выполнена с прямоугольной конструкцией над шкивом 21 (фиг.5), для дальнейшего размещения на ней площадки для посадки БПЛА 20.
К системе может подключаться дисплей для удобного управления и наблюдения оператором через вычислительный модуль.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство с полиспастом для подачи силового кабеля на привязной беспилотный летательный аппарат | 2022 |
|
RU2791943C1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| КАБЕЛЬНЫЙ БАРАБАН ДЛЯ НАМОТКИ-РАЗМОТКИ СИЛОВОГО КАБЕЛЯ | 2024 |
|
RU2835173C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| БЕСПИЛОТНЫЙ ПРИВЯЗНОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2018 |
|
RU2683133C1 |
| Мобильная аэроплатформа | 2021 |
|
RU2779484C1 |
| СПОСОБ УПРАВЛЕНИЯ МАРШРУТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2751367C1 |
| Способ определения высоты платформы из привязного беспилотного летательного аппарата | 2024 |
|
RU2831621C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |

Изобретение относится к технологическому оборудованию для автоматической намотки-размотки кабеля на барабан с дальнейшим использованием кабеля для привязи беспилотных летательных аппаратов. Система автоматической намотки-размотки кабеля привязных БПЛА содержит энкодер, считывающий угол подачи кабеля; частотный преобразователь, регулирующий работу мотора; датчик вращения с флагом, отсчитывающий обороты барабана; драйвер шагового двигателя, считывающий движения клюза на шариковинтовой передаче и его положении относительно концевых выключателей; вычислительный модуль, принимающий и обрабатывающий приходящие сигналы, поступающие от энкодера, частотного преобразователя, датчика вращения, драйвера шагового двигателя, и на основе получаемой информации корректирующий работу системы, осуществляющий корректировку натяжения кабеля; шкив, расположенный на металлической раме и подающий кабель к БПЛА. Система содержит токосъемник, обеспечивающий питанием кабель, наматываемый на барабан и подаваемый к БПЛА без вращения питающего провода внешнего источника питания при вращении барабана. Обеспечивается плавная автоматизированная намотка-размотка кабеля и его корректировка в процессе работы, предупреждение запутывания, обеспечение стабильной работы кабеля без движения питающего провода при движении барабана. 5 з.п. ф-лы, 5 ил.
1. Система автоматической намотки-размотки кабеля привязных БПЛА, включающая цилиндрический барабан с параллельными боковые ограничителями, предназначенный для размотки и намотки кабеля-привязи, выполненный с возможностью закрепления параллельно оси барабана укладчика кабеля с клюзом, с возможностью двунаправленного перемещения оси укладчика и равномерной послойной подачи кабеля-привязи на барабан, отличающаяся тем, что система расположена на раме, на которой с одной стороны закреплено металлическое основание с барабаном, а на противоположной – шкив, обеспечивающий равномерную подачу кабеля к БПЛА, посередине рамы расположен энкодер, контролирующий натяжение кабеля; датчик вращения с флагом, отсчитывающий обороты барабана; также дополнительно содержит драйвер шагового двигателя, считывающий движения клюза на шариковинтовой передаче и его положение относительно концевых выключателей; токосъемник, обеспечивающий питанием кабель, наматываемый на барабан и подаваемый к БПЛА; вычислительный модуль, принимающий и обрабатывающий приходящие сигналы, поступающие от энкодера, частотного преобразователя, датчика вращения, драйвера шагового двигателя, и на основе получаемой информации корректирующий работу системы.
2. Система по п.1, отличающаяся тем, что рама выполнена в виде рельсы.
3. Система по п.1, отличающаяся тем, что рама выполнена в виде металлического основания.
4. Система по п.1, отличающаяся тем, что рама выполнена с дополнительными боковыми конструктивными ребрами.
5. Система по п.1, отличающаяся тем, что рама выполнена с размещением посадочной площадки для БПЛА над шкивом.
6. Система по п.1, отличающаяся тем, что к вычислительному модулю подключен дисплей.
| Устройство с полиспастом для подачи силового кабеля на привязной беспилотный летательный аппарат | 2022 |
|
RU2791943C1 |
| RU 2779020 C1, 30.08.2022 | |||
| СПОСОБ ЭЛЕКТРОСНАБЖЕНИЯ ПРИВЯЗНОГО АЭРОСТАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2449927C2 |

