СП
ГчЭ
Го
Изобретение относится к подъемным устройствам, а именно к управлению механизмом укладки кабеля на барабан лебедки.
Целью изобретения является улучшение условий эксплуатации при управлении лебедкой.
На чертеже представлена функциональная схема системы управления работой лебедки.
Система содержит каретку 1 с направляю- щим желобом 2 и датчиком 3 натяжения.
8конце желоба с правой и лезой стороны от проходящего по нему кабеля установлены датчики 4 и 5 давления. Каретка 1 закреплена на ходовом винте 6 и перемещается вдоль образующей барабана 7 лебедки влево и вправо при вращении винта соответственно по часовой и против часовой стрелки. Вращение винта производится приводом 8 укладчика, управление которым осуществлял блок 9 управления. Концевые выключатели 10 выдают сигналы логическому блоку 11. У реборд барабана 7 установлены датчики 12 и 13 уровня намотки кабеля. Датчик 3 натяжения обеспечивает выдачу информации о натяжении кабеля на блок
9управления. Информацию о направлении вращения барабана 7 лебедки выдает привод 14 барабана лебедки.
Устройство функционирует следующим образом.
После включения системы на вход логического блока 11 поступает информация от датчиков 12 и 13 уровня намотки об уровне намотки с правой и левой сторон барабана. Логический блок 11 задает блоку 9 управления направление движения барабана лебедки. Если кабель намотан до конца бараба- на и уровень намотки по всей длине одинаковый на логический блок подается сигнал от соответствующего концевого выключателя 10. После начала движения барабана лебедки информация, выдаваемая датчиками 4 и 5 давления, указывает на то, в какую сторону искривляется кабель и какова степень его искривления. Так, если при наматывании кабеля на барабан слева направо он искривляется влево вследствие упора в предыдущий виток, намотанный на барабан, и край желоба, в котором установлен датчик 5 давления, то очевидно датчик 5 давления даст показания этой величины давления, а датчик 4 в этом случае будет выдавать нулевую величину давления. Кроме этого, величина давления, выдаваемая датчи- ком 5,чТем больще, чем больше степень искривления кабеля.
Если же кабель наматывается на барабан лебедки справа налево, то при искривлении кабеля вправо вследствие упора в последний намотанны|1 виток и ту сторону же-
5
0
0
г
0
5
0
5
лоба, где расположен датчик 4, показания этого давления выдает датчик 4, а датчик 5 дает нулевые показания.
Таким образом, если наматывание кабеля на барабан производится слева направо, тогда для обеспечения плотной намотки кабеля на барабан блок управления воздействует на привод укладчика 8 так, чтобы датчик 5 выдавал величину давления, соответствующую искривлению кабеля влево на 10-20% от его диаметра.
Величина искривления 10-20% является приблизительной и выбрана из соображений обеспечения плотного прилегания наматываемого кабеля к последнему уложенному витку, но при этом должна быть исключена возможность «соскакивания наматываемого витка и его «наброс на предыдущий виток. Вследствие этого искривления более 50% от диаметра делать недопустимо.
При продолжении вращения барабана в том же направлении и достижении кареткой 1 концевого выключателя 10 правой реборды барабана и включении его кареткой блок 9 управления изменяет направление вращения ходового винта, а значит, и направление укладки кабеля. При этом ходовой винт вращается с такой скоростью, чтобы уже датчик 4 выдавал величину давления, соответствующую искривлению кабеля вправо на 10-20% от его диаметра.
Процесс аналогично продолжается и при достижении кареткой I концевого вьжлюча- теля 10 левой реборды барабана. Таким образом, происходит цикл прохода укладчика слева направо и обратно.
Датчик 3 натяжения обеспечивает выдачу информации в блок 9 управления о величине натяжения кабеля, наматываемого на барабан лебедки. Величина натяжения кабеля необходима для вычисления степени искривления кабеля по показаниям датчиков 4 и 5 давления.
В качестве датчиков уровня намотки кабеля на барабан могут быть использованы реостатные датчики линейных перемещений.
Логический блок состоит из дифференциального усилителя сигналов датчика, двух компараторов и логических схем И.
Формула изобретения
Система управления работой лебедки по авт. св. № 1341151, отличающаяся тем, что,.с целью улучщения условий эксплуатации при управлении лебедкой, система снабжена датчиками уровня намотки, установленными по концам барабана, и логическим -блоком, к входам которого подключены выходы датчиков уровня намотки и концевые выключатели, а выход логического блока подключен к блоку управления.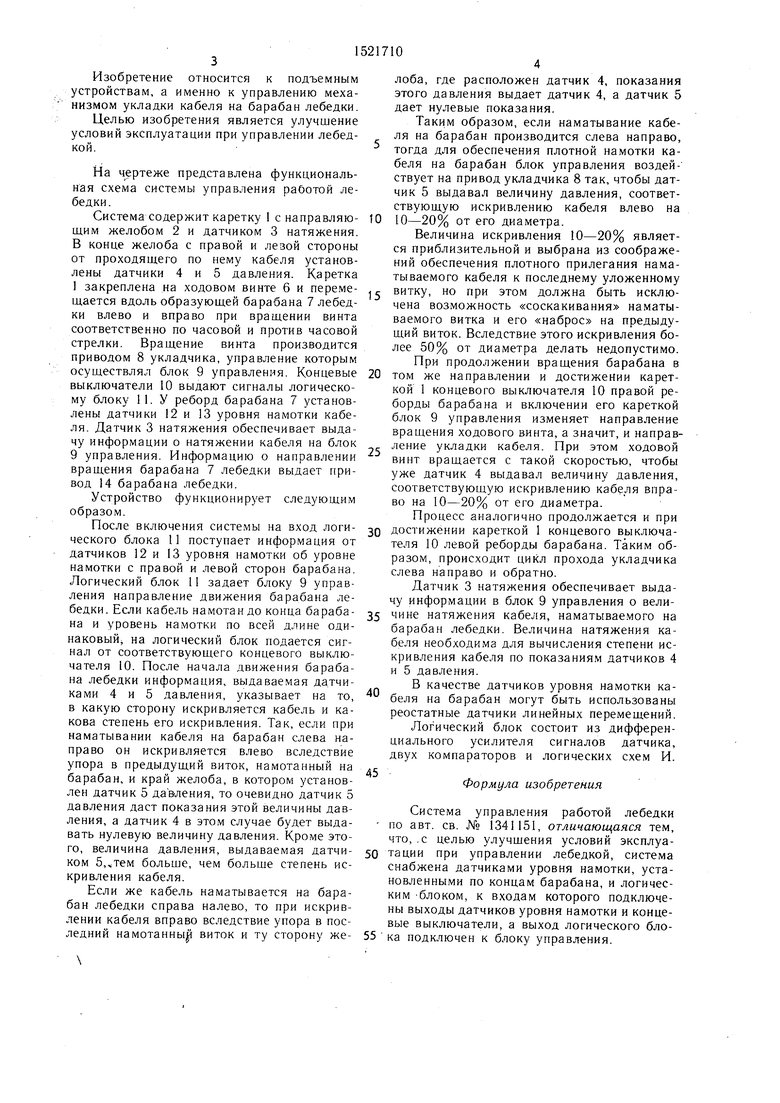
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления работой лебедки | 1985 |
|
SU1341151A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| Система автоматической намотки-размотки кабеля привязных БПЛА | 2023 |
|
RU2819974C1 |
| Устройство для управления кабелеукладчиком | 1980 |
|
SU878732A1 |
| ЛЕБЕДКА ДЛЯ ЗВУКОВОГО ОБОРУДОВАНИЯ | 2019 |
|
RU2731014C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ТРАЛА НА БАРАБАН ЛЕБЕДКИ | 1992 |
|
RU2007915C1 |
| УСТАНОВКА НАМОТКИ-ВЫМОТКИ И ОБОГРЕВА КАБЕЛЯ ПОГРУЖНЫХ ЭЛЕКТРОНАСОСОВ | 1999 |
|
RU2172870C2 |
| РАСКЛАДЧИК НАМОТОЧНОГО СТАНКА | 2009 |
|
RU2392214C1 |
| Кабель-канатный укладчик | 1970 |
|
SU446464A1 |
| УСТРОЙСТВО для ПРОКЛАДКИ КАБЕЛЯ В ГОРНБИБЛйОТЕ/ГЛ | 1969 |
|
SU244456A1 |
Изобретение относится к подъемным устройствам, а именно к управлению механизмом уклдаки кабеля на барабан лебедки. Целью изобретения является улучшение условий эксплуатации при управлении лебедкой. Система содержит каретку 1 с направляющим желобом 2 и датчиком 3 натяжения. В конце желоба установлены датчики 4,5 давления. Каретка 1 закреплена на ходовом винте 6 и перемещается вдоль образующей барабана 7 лебедки. Вращение винта производится приводом 8 укладчика, управление которым осуществляется блоком 9. Концевые выключатели 10 выдают сигналы логическому блоку 11. У реборд барабана 7 установлены датчики 12, 13 уровня намотки кабеля. Датчик 3 натяжения обеспечивает выдачу информации о натяжении каната на блок 9 управления. Информацию о направлении вращения барабана 7 лебедки выдает привод 14 барабана 7 лебедки. 1 ил.
| Система управления работой лебедки | 1985 |
|
SU1341151A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
