Изобрс тение огиосится к гидромашиностроению и может быть использовано при изготовлении гидротурбин.
Цель и;юбретения повышение надежности направляюнито подшипника вала гид- рома ni и ны.
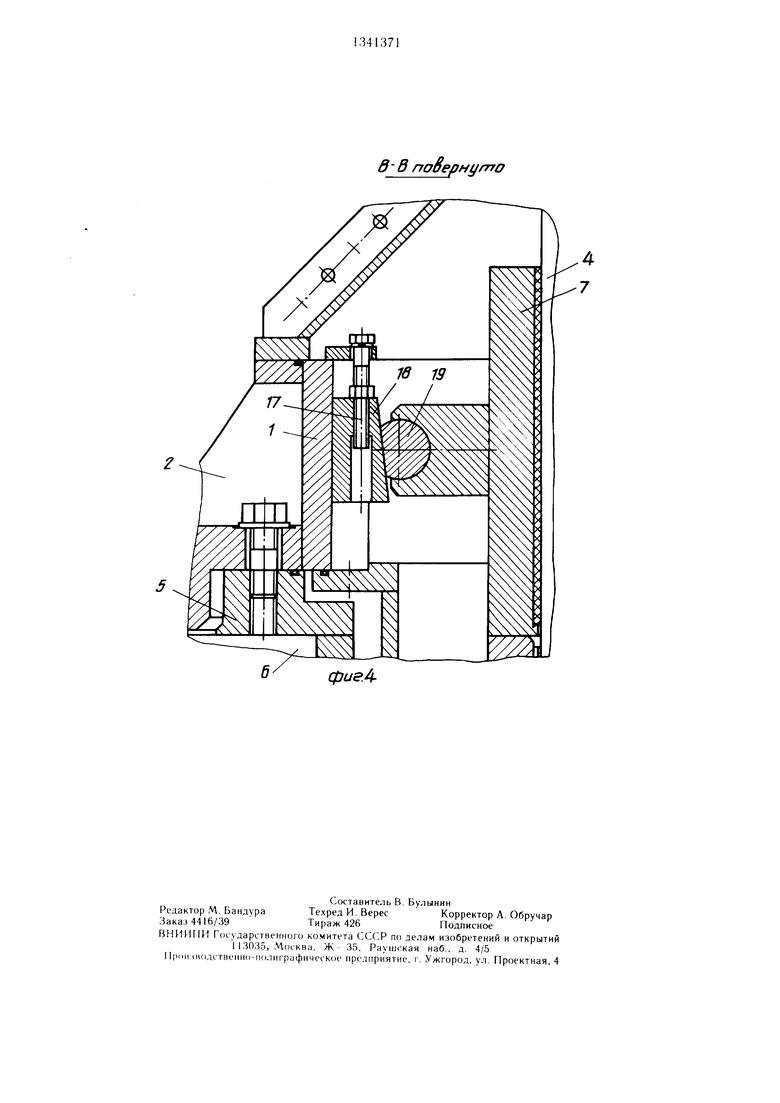
На фиг. 1 изображен направляющий под- Н1И11НИК вала гидромашины, нродольный разрез; на (|)иг. 2 сечение .Л -А на фиг. 1; на фиг. 3 сечение Б -Б на фиг. I; на фиг. 4 сечение В -В на фиг. 2.
)ав;1яю1ций подпшпник вала гидромашины содержит корпус 1 с радиальными ребрами 2 на вне1нней поверхности, установленный при центрирующих элементов 3 конпептрично валу 4 в Kpi iiiiKe 5 гидромашины, снабженной радиальными ребрами в, paзмeп eнпыe в корпусе 1 с iai)p;iMii ()()сительпо вала 4 се1 мепты 7 с дистанционирующими элеменгами 8 между 1П1МИ и регу;1яторы 9 зазоров 6. Корпус I гнабжсч) рез1)бовыми отверстиями И), цент- |)И)ую1Цие :1леме1ггы 3 вьпюлнены в виде размещенных в ппх бо,1тов 11 с контргайками 12, взапмодействук)ни1х с крыгпкой 5, регуляторы 9 зазоров (S в виде ипи.лек 13, имеющих гайки 14 и 1л со сферическими коптактными поверхностями и усганов.к нньгх в стенке корпуса с ко.пьце- вым зазором ., пальцев 16, свя.занньгч со пшильками 13, имеющих иерпендикулярные им оси и размещенных в се1 ментах 7, п к. пшовьгх механизмов 17, каждый из ко- включает ци.1индрпческие клин 18 и упор 19, имеющие в.заимпо иерпендикулярные (Х и и плоские коптактпые поверхности и ()азмеп1еипые соответственпо в стенке К())пуса 1 и сегмента 7, а дистанционирую- щие элемент) 8 . в виде разме- по каждсло сегмента 7 опорных б(),1Т()в 20, взаимодействуюпи1х с 6o, i- гами 20 сосед его сегме Г а 7, 1ричем 6o, i- ты 20 ) Г сосед 1х сегме 1тов 7 име()т с(})ерпческпе контакт 1.е 1 оверх- посги 21.
1 а;1иал) ребра 2 1 i одпой 1лоск()сти с реб()ами 6 ки 5 гпдро а1пи ы, а также с клппьями 18 и упорам 1 19 ()в 17.
Подпп1П 1пк работает следую цим образом.
Пр работе г 1д|) усилии от вала 4, обусловлеп 1ые механическим, гидрав- .1ическим ,()м, воспри 1имаются от- дел) сегме тами 7, при этом радиал)- ные 1агрузк 1 к.ин() меха)измами 17,
установленными между сегментами 7 и корпусом 1 под|пипника, а тангенциальные - этими же механизмами за ечет расположения контакт 1Ь х оверхностей клина 18 и
5 упора 19 под углом друг к другу. Нагрузка, 1 ереданная от вала на сегмент через клиновые механизмы 17, перераспределяется на корпус 1 и 5 гидро- . Шпилька 13 создает постоянный натяг в механизмах 17, исключая
тем самым изменение рабочего зазора 6 между валом и сегментами 7. В результате при работе гидромап1ины обеспечивается требуемая жесткость , исключающая возникновение вибра 1ий при постоянном ра5 бочем зазоре между валом и сегментами и Ювь П1ается надежность под иипника.
Формула изобретения
I. На 1равляющий вала гидро0 мап1ипы, содержа1 1ий корпус с радиальными ребрами на поверхности, уста- новлен {Ь Й ри 1омо1 1,и 1ентрирующих элементов .ентрично валу в гидро- ., радиальными ребрами,
разме це ые в корпусе с зазорами отно- сите, ва,та сегме( с дистанпионирую- ии1ми элементами между ними и регуляторы зазоров, отличающийся тем, что, с .1елью овы пения надежноети, корпус снабжен резьбовыми отверстиями, 1ентрирую 1ие элеQ мент вь 1олнены в виде разме ценных в них болтов с контргайками, взаимодействую- с , регуляторы зазоров - в виде ппилек, имеющих гайки и пайбы со сферическими контакт 1Ь ми юверхностями и установленн)х в корпуса с вым зазором, альпев, связан ых со ппиль- , ерпендмкулярные м оси и pa. в сегме1 тах, клиновь х меха1 измов, каждый 1з которых включает и1.П 1дрпческие клин и , но Г ерпе 1дикуля1) оси и 1лоские контакт0 поверХ К) разме це жь е соответ- ствен {о в и сегмента, а дис- та.ио 1ирующие элементы вы 1олнень в виде размещенных но высоте каждого сегмента опорных болтов, взаимодействуюпшх с бол тами соседнего сегмента, г ричем болты одного из соседних сегментов имеют сферические контактные поверхности.
2. Подщи 1ник по п. 1, отличающийся тем, что радиальные ребра корпуса расположены
в одной ЛОСКОСТИ С. ребра МИ
Q гидрома 1ИН 1|, а также с клиньями и упорами механизмов.
CPU г 2
д в побернуто
фие.4
| название | год | авторы | номер документа |
|---|---|---|---|
| ТУРБОКОМПРЕССОР | 2011 |
|
RU2467208C1 |
| Барабан моталки | 1978 |
|
SU795614A1 |
| СПОСОБ КОРРЕКТИРОВКИ ФОРМЫ ПРИЛЕГАЮЩИХ ПЛОСКОСТЕЙ КОРПУСА СТАТОРА ГИДРОМАШИНЫ | 2000 |
|
RU2181165C2 |
| Направляющий подшипник вертикальной гидромашины | 1988 |
|
SU1585541A1 |
| Направляющий подшипник для вала гидромашины | 1974 |
|
SU618570A1 |
| МЕХАНИЗМ НАСТРОЙКИ ВАЛЬЦОВ НА ПАРАЛЛЕЛЬНОСТЬ | 1995 |
|
RU2139762C1 |
| ШАРНИРНОЕ СОЕДИНЕНИЕ СОЧЛЕНЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2492065C2 |
| СТАТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1971 |
|
SU307462A1 |
| Подпятник вертикального гидрогенератора | 1983 |
|
SU1161731A1 |
| Статор электрической машины | 1979 |
|
SU843101A1 |
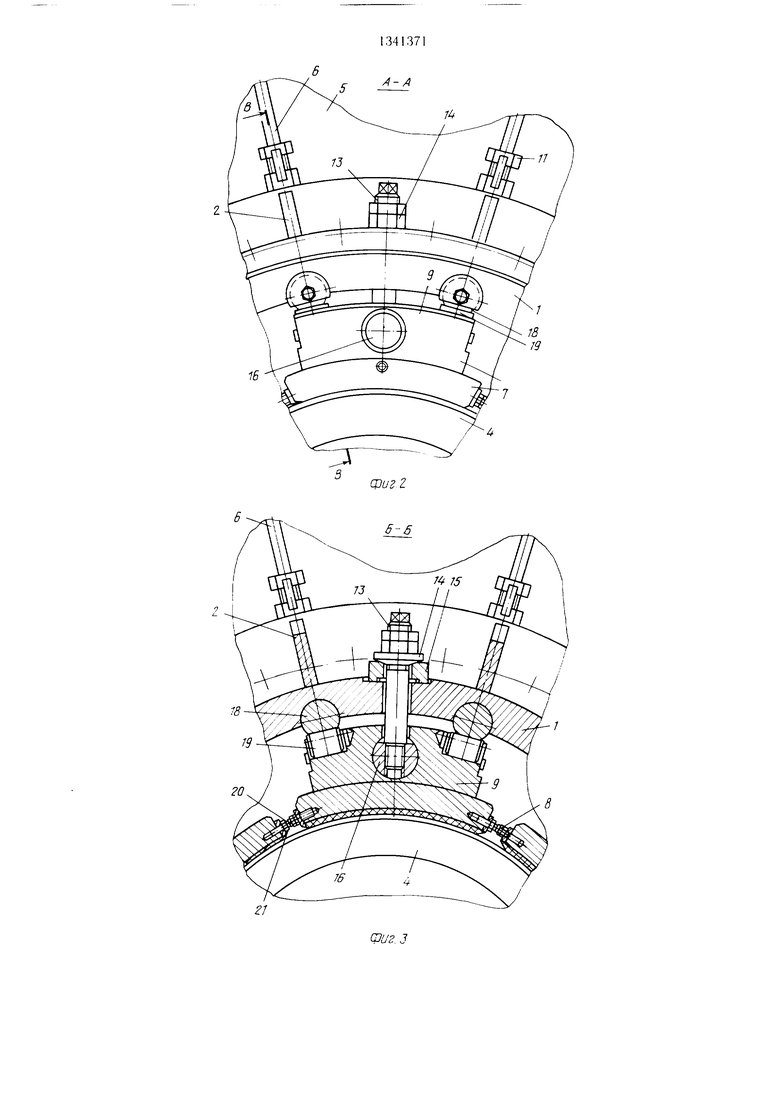
Изобретение относится к гидромашиностроению и позволяет повысить надежность подижпника. В корпусе I выполпеиь: резьбовые отверстия 10. Пентрируюи1ие элементы 3 выполнены в виде размещенных в них болтов II с контргайками 12, взаимодействующи.х с крыпжой 5. Регуляторы зазоров выполнены в виде пшилек 13, пальцев Ui и к.чииовых механизмов. ,пь- ки имеют гайки 14 и шайб) 15 со сферическими контактными поверхностями и установлены в стенке корнуса с ко.1ьневым зазором. Па;1ьпы 16 связаны со шпи.чьками, имеют перпендикулярные им оси и размеше- |11 и сегментах (Г) 7. Ци.пшдрические клин и уг1()) кажюго к.чипового мехапизма им(чот взаимно пс|1П1 ч ик лярн1.1е оси и п. юс- кие контакгнь1е и и размещены соо: fiCTCTBeHHo в сг(мже корпуса и С 7. , 1истанпионирую1цие ъ, 1омснты Г, 7 вьпю.чпе- ны в виде размещенных по высоте каждого С 7 опорных бг),-1тои, взаимоде1 1ствуюп1их с опорными болтами соседнего С 7. Бо,1ты () из соседних С. 7 имеюг с(}1е 1ические к(}цгакт1П)1е поверхности. В ,гате обеспечивается требуемая жесгкосгь подпшппи- ка, исключающая возникповение иибрацнй при постоянном рабочем за lope между ia.ioM и сегмептами. 1 п.{)-. 1ы, 4 и,г « (Л 00 4 оо 
| Направляющий нодшипник гидротурбины Усть-Илимской ГЭС | |||
| КОМПЛЕКТНОЕ РАСПРЕДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1994 |
|
RU2107370C1 |
