отрицательной обратной связи и усилитель 14 мощности. Конструкция стопы 15 состоит из верхней возвратной пружины 16, сердечника 17 из немагнитного материала, железного сердечника 18, верхней 19 и нижней 20 направляющих, соленоида 21, штока 22 голени 23, шарнира 24 привода, шарнира 25 голеностопного сустава, стопы 26,
1
Изобретение отйосится к медицине и может быть, в частности, испоЛьзо- вано в протезировании при конструировании искусственных протезов ног человека и в конструкциях шагаюпщх аппаратов.
Цель изобретения - приближение характера ходьбы искусственной стопы к естественному.
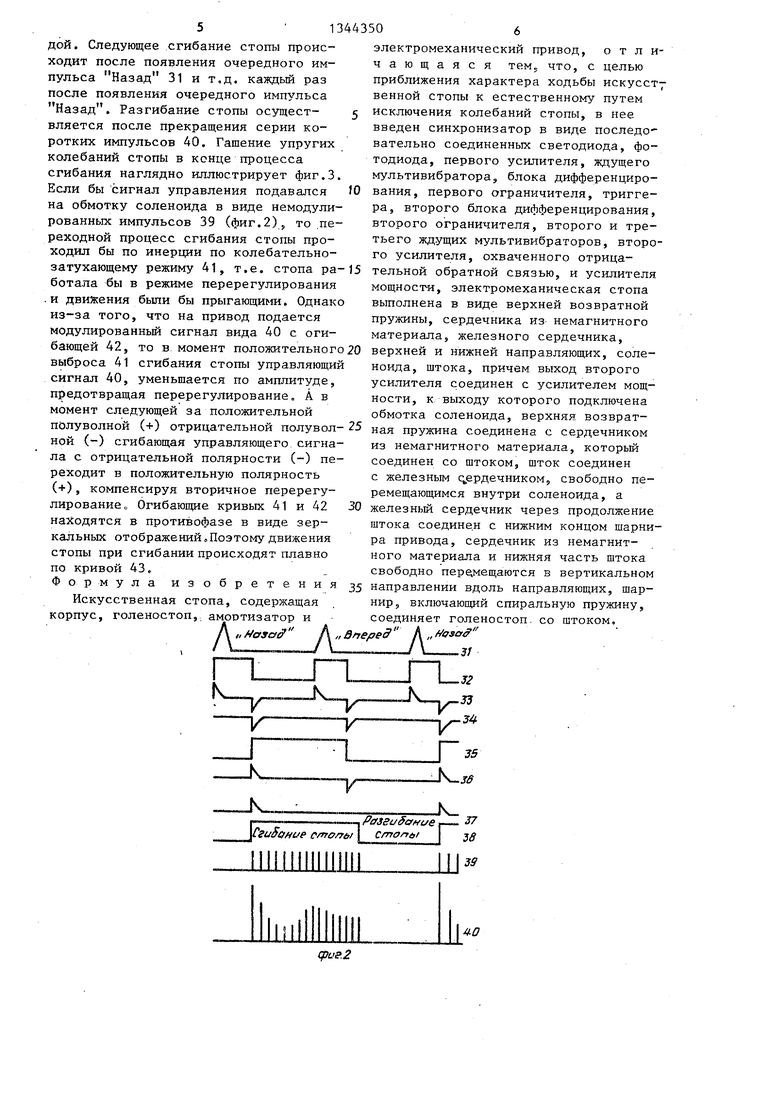
На фиг.1 изображена блок-схема искусственной стопы и схематически показаны устройство стопы и принцип ее работы; на фиг.2 - эпюры напряжений с выхода блоков устройства -при движении ноги вперед и назад в пределах одного- периода} на фиг.З - график процесса демпфирования колебаний стопы в конце отталкивания при выполнении движений.
Устройство состоит из светодиода 1 (фиг.1), фотодиода 2, первого усилителя 3, первого ждущего мультивибратора 4, первой дифференцирующей цепочки 5, первого ограничителя 6, триггера 7, второй дифференцирующей цепочки 8, второго ограничителя 9, второго ждущего мультивибратора 10.
Перечисленные элементы обеспечивают синхронизацию работы устройства.
Далее устройство состоит из трет тьего ждущего мультивибратора 11, второго усилителя 12, канала 13 отрицательной обратной связи и усилителя 14 мощности. Эти элементы участвуют в управлении работой искусственной стопы 15. Конструкция искусственной стопы 15 состоит из верхней возвратной пружины 16, сердечника 17 из немагнитного материала, железного сердечника 18, верхней направляющей
опорной площадки 27, нижней возвратной пружины 28, верхней 29 и нижней 30 опоры, Светодиод 1 и фотодиод 2 укреплены на противоположных сторонах ног напротив друг друга. При этом в . момент сближения ступней ног световой поток светодиода 1 попадает на фотодиод 2. 3 ил„
19, нижней направляющей 20, соленоида 21, штока 22 голени-корпуса 23, шарнира 24 привода, шарнира 25 голеностопного сустава,собственно стопы 26, опорной площадки 27, нижней воз вратной пружины 28, верхней опоры 29 и нижней опоры 30. Канал 13 отрицательной обратной связи состоит из
последовательно включенного пикового детектора, усилителя и интегрирующей цепочки. Усилитель 12 имеет два входа с блоков 11 и 43, соединяюш;иеся через развязывающие резисторы на базе транзистора усилителя 12, работающего в режиме класса С. Светодиод 1 и фотодиод 2 укреплены на противопо- ложных сторонах ног напротив.друг друга с таким расчетом, чтобы световой поток светодиода 1 попадал на фотодиод 2 в момент сближения ступеней противоположных ног.
I
Искусственная стопа работает следующим образом.
При движении в момент прохождения обеих ног вертикального положения световой луч светодиада 1 попадает на фотодиод 2, на выходе которого возникает ЭДС в виде импульса 31 (фиг.1 и 2), которьй усиливается усилителем 3. Усиленный импульс 31 поступает на запуск первого ждущего мультивибратора 4, с выхода которого снимается импульс 32 прямоугольной
формы. Длительность импульса регулируется. После прохождения первой дифференцирующей цепочки 5 прямоугольный импульс 32 дифференцируется на два остроконечных импульса 33 положительной и отрицательной полярности. Первьй ограничитель 6 пропускает
только импульсы 34 отрицательной полярности, которые поступают на .запус триггера 7, с выхода которого снимаются импульсы прямоугольной формы 35 После прохождения через вторую диф- ференцирующую цепочку 8 импульсы 35 разделяются на импульсы 36 положительной и отрицательной полярности. Второй ограничитель 9 пропускает только импульсы 37 положительной по- лярности. Эти импульсы запускают второй ждущий мультивибратор 10, с выхода которого снимается прямоугольньй импульс 38 регулируемой длительности Этот широкий импульс 38 поступает в качестве напряжения питания на третий ждущий мультивибратор 11, генерирующий серию коротких импульсов 39, количество которых при неизменной частоте определяется длительностью широкого импульса 38. Серия коротких импульсов 39 проходит через усилител 12 и поступает с его выхода на последовательно соединенные пиковый детектор, усилитель и интегрирующую цепочку канала 13 отрицательной обратной связи и одновременно с выхода усилителя 12 поступает на усилитель 14 мощности. Одновременно с выхода блока 13 сигналы поступают на вход усилителя 12. Блок 13 с усилителем
12замыкают канал отрицательной обратной связи. Блок 13 под действием пришедшего первого импульса генери- рует экспоненциальное напряжение, нарастающее по экспоненте к 20 мс и
угасающее также по экспоненте к
I
ЗОО мс. Полярность этого двухкомпонентного напряжения противоположна
полярности импульса, поступающего
на вход блока 12 от блока 11, Блок
13является колебательным звеном. С выхода блока 12 за счет -действия отрицательной обратной связи, образованной колебательным звеном блока 13, снимается импульсное напряжение 41, переходной процесс которого носит колебательно-затухающий режим. Колебательно-затухающий режим получается за счет колебательного процесса суммирования двухкомпонентных экспонент, формируемых блоком 13. Каждьй пришедший импульс вызывает
свое двухкомпонентное экспоненциаль- ное напряжение, пропорциональное амплитуде вызвавшего его импульса, поступающего в канал отрицательной обратной связи. Экспоненты суммируют
с 10 J5 20
35
40
0
ся и поступают с выхода блока 13 на блок 12. После усиления усилителем 14 мощности усиленные импульсы типа 41 с колебательно-затухающим переходным процессом поступают на обмотку соленоида 21.
Сгибание стопы происходит следующим образом.
Под действием пришедшего импульсного напряжения вида 41 соленоид 21 создает магнитное поле. Под действием магнитного поля железный сердечник 18 втягивается внутрь соленоида. Железный сердечник жестко связан со штоком 22, который перемещается вдоль направляюш их 19 и 20. При этом преодолевается сопротивление пружин 16 и 28. Немагнитный сердечник 17 сделан несколько большего диаметра, чем щток 22, для того, чтобы пружина 16 при сжатии упиралась на верхнюю часть немагнитного сердечника 17 и не изгибалась. Движение штока 22 вверх приводит к сгибанию механизма стопы 26 относительно голеностопного шарнира 25. Дальнейшее движение штока 22 вверх приводит к отталкиванию стопы от земли 27. Опоры 29 и 21 укреплены непосредственно на голени 23. Свобод ному перемещению стопы способствует ;Шарнирное соединение 24 штока 22 со стопой 26. I
Устройство предназначено для конструирования искусственной стопы одной ноги (левой или правой). Поэтому устройство управления движением стопы реагирует только на импульс Назад 31, которьй образуется при движении ноги вперед и в момент прохождения ногой вертикального положения. От импульса Вперед 31 устройство управления не срабатывает благодаря режиму работы триггера 7. Короткие импульсы 39 управления формируются с задержкой относительно импульса .Назад, необходимой для постановки ноги на опору после прохождения вертикального положения при движении ноги вперед. В момент постановки ноги на опору (или чуть позже) на соленоид поступают короткие ршпульсы 40, вызывая ее сгибание. Задержка начала сгибания регулируется длительностью импульса 32, а продолжительность сгибания р гулиру- ется длительностью импульса 38. Опти- мальньй режим сгибания подбирается частотой следования коротких импульсов 39, их длительностью и амплитудои. Следующее сгибание стопы происходит после появления очередного импульса Назад 31 и т,д. каждый раз после появления очередного импульса Назад. Разгибание стопы осущест- вляется после прекращения серии коротких импульсов 40. Гашение упругих колебаний стопы в конце процесса сгибания наглядно иллюстрирует фиг.З. Если бы сигнал управления подавался на обмотку соленоида в виде немодули- рованных импульсов 39 (фиг.2), то .переходной процесс сгибания стопы проходил бы по инерции по колебательно- затухающему режиму 41, т.е. стопа работала бы в режиме перерегулирования .и движения бьши бы прыгающими. Однако из-за того, что на привод подается модулированный сигнал вида 40 с огибающей 42, то в момент положительного20 верхней и нижней направляющих, солевыброса 41 сгибания стопы управляющий сигнал 40, уменьшается по амплитуде, предотвращая перерегулирование, А в момент следующей за положительной
полуволной (+) отрицательной полувол- 25 нал пружина соединена с сердечником ной (-) сгибающая управляющего сигна- из немагнитного материала, который ла с отрицательной полярности (-) переходит в положительную полярность (+), компенсируя вторичное перерегулирование Огибающие кривых 41 и 42 30 находятся в противофазе в виде зеркальных отображений,Поэтому движения
ноида, штока, причем выход второго усилителя соединен с усилителем мощности, к выходу которого подключена обмотка соленоида, верхняя возвратсоединен со штоком, шток соединен с железным с ердечником, свободно перемещающимся внутри соленоида, а
железньи сердечник через продолжение штока соедине.н с нижним концом шарни ра привода, сердечник из немагнитного материала и нижняя часть штока свободно пере мешдются в вертикальном направлении вдоль направляющих, шарнир, включающий спиральную пружину, соединяет голеностоп. со штоком.
и происходят плавно
зобретения
стопа, содержащая п,. амортизатор и
35
К„Маза h,,Bnefled - К,,
железньи серде штока соедине.н ра привода, се ного материала свободно направлении вд нир, включающи соединяет голе
IIIIIIII
электромеханический привод, отличающаяся тем, что, с целью приближения характера ходьбы искусст7 венной стопы к естественному путем исключения колебаний стопы, в нее введен синхронизатор в виде последовательно соединенных светодиода, фотодиода, первого усилителя, ждущего мультивибратора, блока дифференцирования, первого ограничителя, триггера, второго блока дифференцирования, второго ограничителя, второго и третьего ждущих мультивибраторов, второго усилителя, охваченного отрицательной обратной связью, и усилителя мощност-и, электромеханическая стопа выполнена в виде верхней возвратной пружины, сердечника из немагнитного материала, железного сердечника.
нал пружина соединена с сердечником из немагнитного материала, который
ноида, штока, причем выход второго усилителя соединен с усилителем мощности, к выходу которого подключена обмотка соленоида, верхняя возвратнал пружина соединена с сердечником из немагнитного материала, который
соединен со штоком, шток соединен с железным с ердечником, свободно перемещающимся внутри соленоида, а
25 нал пружина соединена с сердечником из немагнитного материала, который 30
35
Bnefled - К,,
железньи сердечник через продолжение штока соедине.н с нижним концом шарнира привода, сердечник из немагнитного материала и нижняя часть штока свободно пере мешдются в вертикальном направлении вдоль направляющих, шарнир, включающий спиральную пружину, соединяет голеностоп. со штоком.
и
Редактор М. Келемеш
Составитель В. Баганов
Техред А.Кравчук Корректор С.Черни
Заказ 4870/5 Тираж 594Подписное
ВНИЩИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фт.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования мышечного сокращения | 1987 |
|
SU1503832A1 |
| Активный протез нижней конечности с биоэлектрическим управлением | 1988 |
|
SU1731210A1 |
| Устройство управления двигательным аппаратом | 1988 |
|
SU1577784A1 |
| БИОНИЧЕСКИЙ ШАГАЮЩИЙ АППАРАТ | 2005 |
|
RU2293014C1 |
| Устройство для исследования центральной нервной системы | 1988 |
|
SU1810063A1 |
| БИОНИЧЕСКИЙ СТАБИЛИЗАТОР ДАВЛЕНИЯ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2003 |
|
RU2250487C1 |
| Велотренажер | 1989 |
|
SU1683796A1 |
| Устройство для моделирования контрастности | 1988 |
|
SU1642484A1 |
| Управляемая электронная линия задержки | 1984 |
|
SU1224998A1 |
| Устройство для исследования нервной системы | 1988 |
|
SU1600695A1 |

Изобретение относится к медицинской технике Цель изобретения приближение характера ходьбы искусственной стопы к естественному. Синхронизацию работы устройства обеспечивают светодиод 1, фотодиод 2, пер- вьш усилитель 3, первый 4 и второй 10 ждущие мультивибраторы, первая 5 и вторая 8 дифференцирующие цепочки, первый 6, второй 9 ограничители и триггер 1, В управлении работой стопы участвуют третий ждущий м шьтивибра- тор 11. ВТОРОЙ усилитель 12, канал 13 (Л 00 4 N со СП ю Фиг.1
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
