Изобретение относится к машиностроению и может быть использовано в конструкциях роботов (шагающих аппаратов).
Известно устройство миоэлектрического управления искусственной конечностью (Патент РФ 2108768, A 61 F 2/72, Гаммер П., Сюсц К., Кальмар Я.). Устройство используется для управления приводимой от электродвигателя искусственной конечностью. При пропорциональном регулировании скорости из различных заданных значений числа оборотов приводного двигателя, определяемых для каждого соответствующим электродным напряжением, выявляется заданное значение числа оборотов, согласующееся с измеренным электродным напряжением. Это заданное значение числа оборотов сравнивается с фактическим числом оборотов двигателя и в виде рассогласования подается в пропорционально-интегральный регулятор (ПИ-регулятор). В ПИ-регуляторе отклонение регулируемой величины в соответствии с установленными параметрами преобразуется в сигнал широтно-импульсной модуляции (ШИМ), оказывающий управляющее воздействие на приводной двигатель. В результате этого он приобретает число оборотов, пропорциональное электронному напряжению. Измеряется соответствующая фактическая величина тока приводного двигателя и сравнивается с заданным максимум тока, при превышении которого ПИ-регулятор отключается. При пропорциональном регулировании захватывающего усилия создание этого усилия происходит поэтапно. Максимальное захватывающее усилие подразделяется на ступени, причем фактическое электродное напряжение соответствует определенному числу ступеней. С каждой ступенью согласуются определенное значение широтно-импульсной модуляции (значение ШИМ) и соответствующее значение отключения тока. Счетчиком производится отсчет в сторону увеличения от показания "0" до числа ступеней, заданного фактическим электродным напряжением, причем выбираемое счетчиком значение ШИМ выдается с эквивалентным ему значением отключения тока. Параллельно с этим измеряется ток приводного двигателя и сравнивается с выданным значением отключения тока. При достижении этого значения отключения счетчик повышается на 1 и выдается следующее значение ШИМ. При достижении счетчиком числа ступеней, заданного фактическим электродным напряжением, заданное захватывающее усилие достигнуто и приводной двигатель отключается. Измеряется соответствующая фактическая величина тока приводного двигателя и сравнивается с заданным максимумом тока, при превышении которого приводной двигатель также отключается.
Недостатком известного устройства является сложность конструкции системы управления.
Наиболее близким техническим решением (прототипом) является нога манипулятора (Регистрационный номер заявки 93038086, B 25 J 13/04, Едапин Е.Н.), содержащая корпус, к которому через шарнир крепится бедренный сустав манипулятора, состоящий из трех шарниров. Последним шарниром бедренный сустав соединен с бедром. Бедро через коленный сустав, состоящий из одного шарнира, связано с голенью. Голень шарнирно соединена со стопой, а стопа с пальцем. Оси шарниров стопы и колена параллельны друг другу и корпусу манипулятора. Каждый шарнир имеет датчик угловых перемещений и электродвигатель. Стопа и палец имеют датчики контакта с поверхностью. Датчики и электродвигатели шарниров связаны с блоком управления. Манипулятор с предложенной ногой может передвигаться по любой поверхности и выполнять задачу по транспортировке груза.
Недостатками прототипа являются недостаточная плавность движения стопы, низкое быстродействие сгибательного процесса, отсутствие учета темпа движения.
Задачей изобретения является разработка бионического шагающего аппарата.
Техническим результатом предлагаемого бионического шагающего аппарата является повышение плавности передвижения стопы шагающего аппарата путем устранения перерегулирования заднего толчка, повышения быстродействия сгибательного процесса и оптимизации двигательного режима в зависимости от рельефа местности и темпа движения.
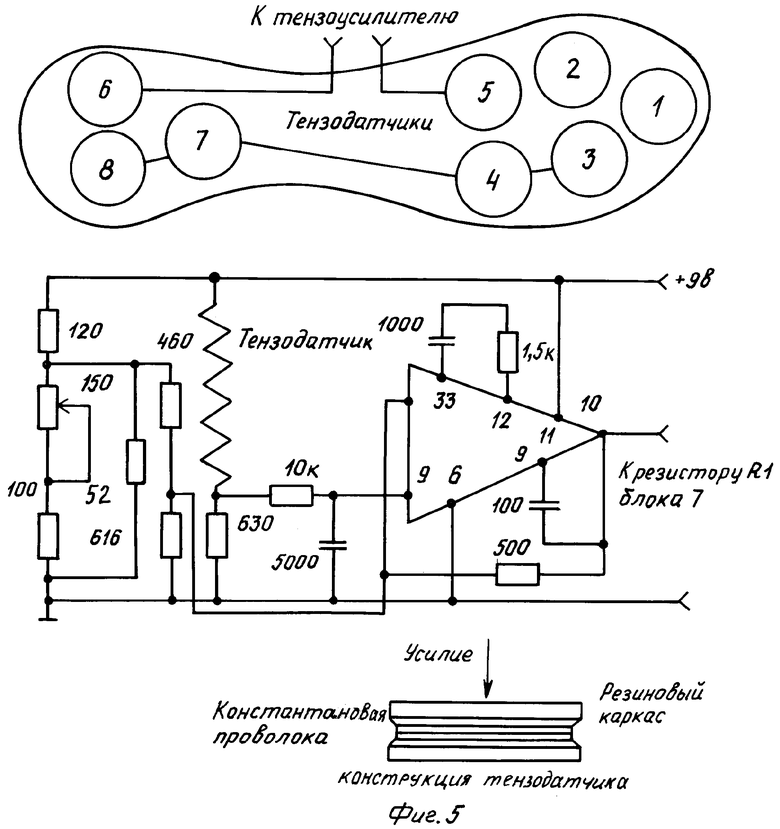
Технический результат достигается тем, что в бионическом шагающем аппарате, состоящем из стопы, упругого вертикально стоящего стержня голени, который соединен со стопой посредством соединительного элемента шарнира для образования области голеностопного сочленения, блока управления, в стопе установлены тензодатчики, соединенные с тензоусилителем, который, в свою очередь, соединен с сумматором блока управления, соединенная с усилителем обмотка, внутри которой расположен железный сердечник, постоянный магнит, электромагнит с сердечником из магнитного материала, закрепленным на стержне голени, соединенный с усилителем мощности блока управления, вдоль голени установлены направляющие, возвратная пружина, соединенная со свободным концом стержня голени и верхней опорой, бионическое устройство управления движением шагающего аппарата содержит управляемый ждущий мультивибратор, соединенный с генератором импульсов, который, в свою очередь, соединен с импульсным усилителем, сумматором и входом амплитудного детектора с регулирующим шунтом и интегрирующей цепью, причем детектор соединен с усилителем мощности, интегрирующей цепью, варикапом и фазоинвертором.
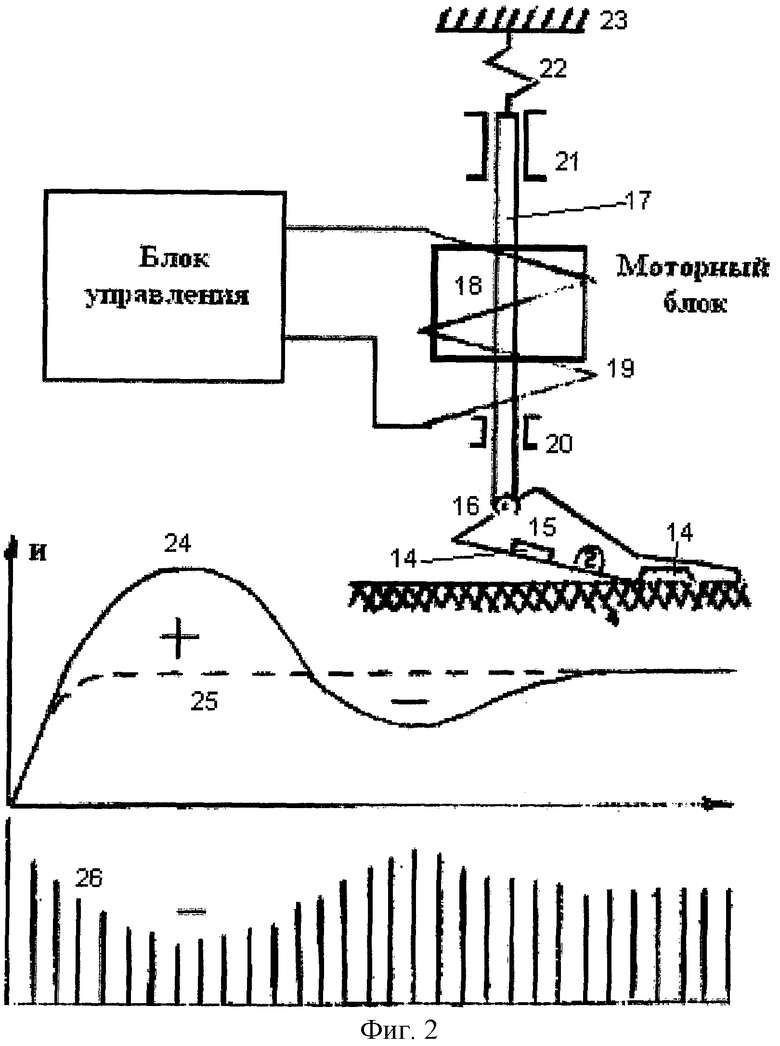
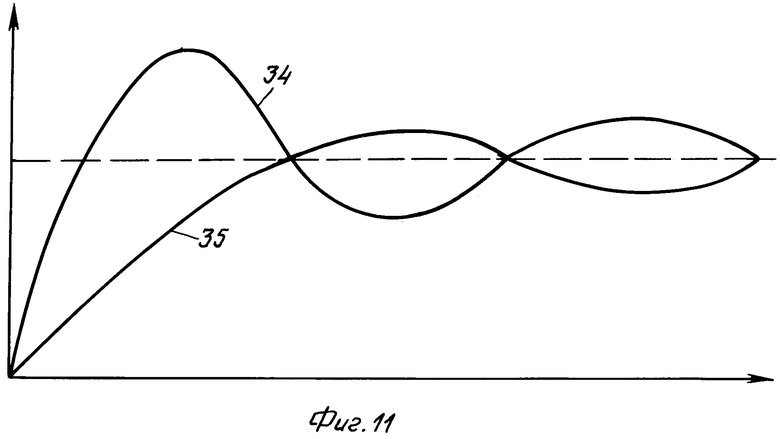
Благодаря тому, что в стопе установлена соединенная с усилителем обмотка, внутри которой расположен железный сердечник, постоянный магнит, а бионическое устройство управления движением шагающего аппарата содержит управляемый ждущий мультивибратор, соединенный с генератором импульсов, который, в свою очередь, соединен с импульсным усилителем, сумматором и входом амплитудного детектора с регулирующим шунтом и интегрирующей цепью, причем детектор соединен с усилителем мощности, интегрирующей цепью, варикапом и фазоинвертором, магнитное поле электромагнита изменяется по модулированному закону. Вначале магнитное поле максимально, что способствует разгону сердечника. Затем при приближении к концу сгибания стопы магнитное поле ослабляется, препятствуя перерегулированию. В конце отталкивания магнитное поле вновь усиливается, способствуя развитию максимального усилия в момент отталкивания от опоры. Следовательно, благодаря воздействию на электромагнит модулированного напряжения, сгибание стопы происходит в плавном апериодическом режиме без перерегулирования заднего толчка, что показано в виде кривой 25 на фиг.2. Если бы напряжение на электромагнит поступало немодулированное, то сердечник двигался бы по траектории, показанной на фиг.11, что отрицательно сказалось бы на выполнении заднего толчка - кривая 24 на фиг.2.
Поэтому управление работой двигательного механизма шагающего аппарата модулированным напряжением значительно улучшает плавность движения стопы.
При изменении темпа движения выходные импульсы ждущего мультивибратора суммируются на интегрирующей цепи и поступают на варикап, вызывая изменение его емкости, которая включается параллельно емкости амплитудного детектора с регулируемым шунтом и интегрирующей цепью. Снижение темпа движения приведет к уменьшению напряжения на интегрирующей цепи и повышению напряжения на варикапе, включенном в цепь усилителя, что приведет к уменьшению емкости конденсатора интегрирующей цепи. Увеличение емкости конденсатора приведет к изменению формы напряжения в цепи отрицательной обратной связи. Поэтому огибающая модулированного напряжения будет смещаться в правую сторону, а при увеличении темпа движения - в левую сторону, увеличивая или у меньшая частоту огибающей управляющего напряжения. Длительность пачки управляющих импульсов также зависит от темпа движения. При его уменьшении напряжение на интегрирующей цепи уменьшается. Уменьшенное напряжение через фазоинвертор увеличивает емкость варикапа блока. Поэтому емкость зарядной цепи увеличивается. Это приводит к увеличению длительности выходного импульса и, как следствие этого, увеличению длительности управляющего напряжения. Таким образом, при уменьшении темпа движения синхронно происходит увеличение длительности управляющего напряжения и уменьшение частоты огибающей. Это благоприятным образом сказывается на быстродействии сгибательного процесса. При медленном темпе длительность управляющего напряжения должна быть больше, а частота огибающей должна быть меньше.
Поэтому в предлагаемом бионическом шагающем аппарате учитывается темп передвижения и устройство управления реагирует на его изменение.
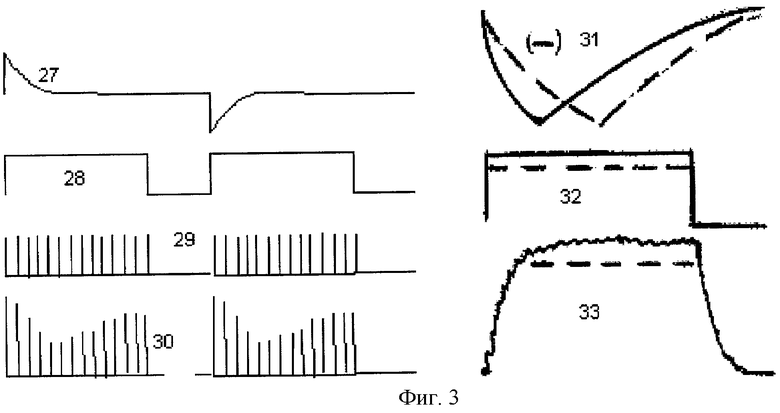
Если шагающий аппарат двигается с грузом вверх, то усилие отталкивания должно возрастать. Это происходит следующим образом. Усилие на тензодатчик возрастает. Напряжение на выходе тензодатчика усиливается тензоусилителем. Это повышенное напряжение поступает на сумматор. На сумматоре повышается коллекторное напряжение и увеличивается амплитуда выходного напряжения. Поэтому на электромагнит поступает напряжение повышенной амплитуды и мощности. Поэтому сила отталкивания от опоры увеличивается. Если шагающий аппарат без груза двигается вниз, сила отталкивания от опоры снижается. Изменение напряжения на тензодатчике и тензоусилитиле при изменении профиля местности показано пунктиром на 32 на фиг.3, а изменение напряжения на интегрирующей цепи блока показано пунктиром на 33 на фиг.3. Это также благоприятным образом сказывается на динамике движения.
Поэтому предлагаемое устройство реагирует на рельеф местности соответствующими изменениями параметров управляющего напряжения.
Таким образом, совокупность существенных признаков, изложенных в формуле изобретения, позволяет достичь желаемый технический результат.
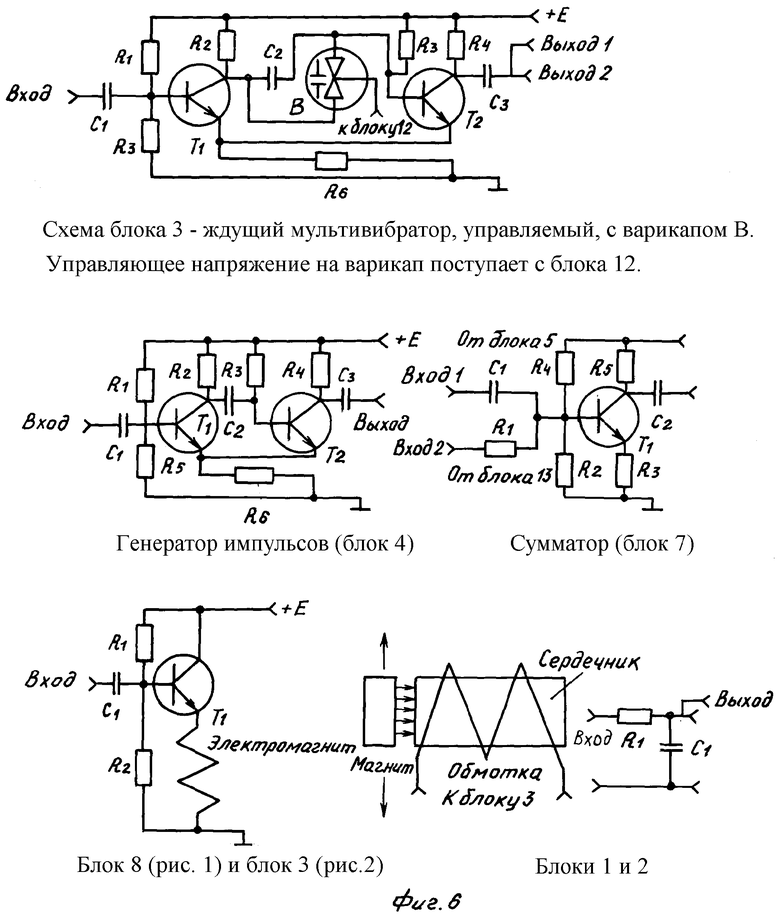
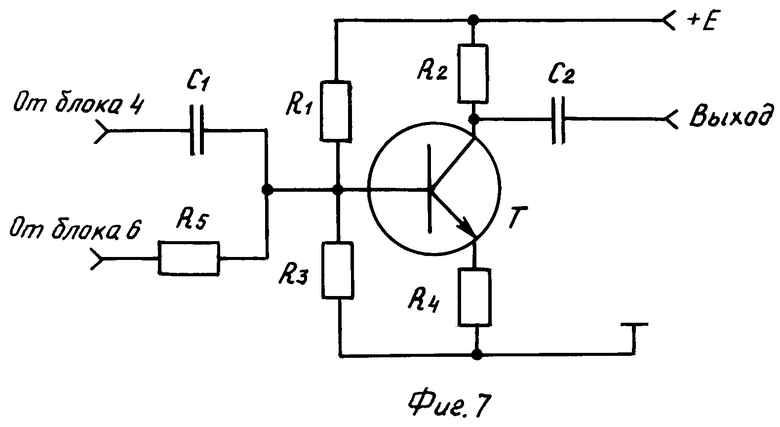
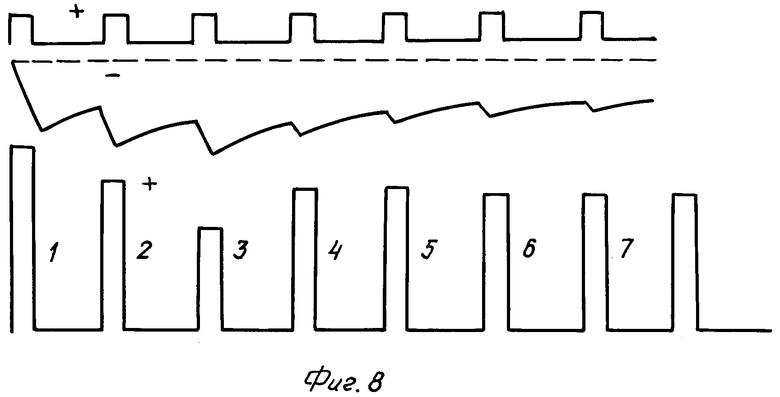
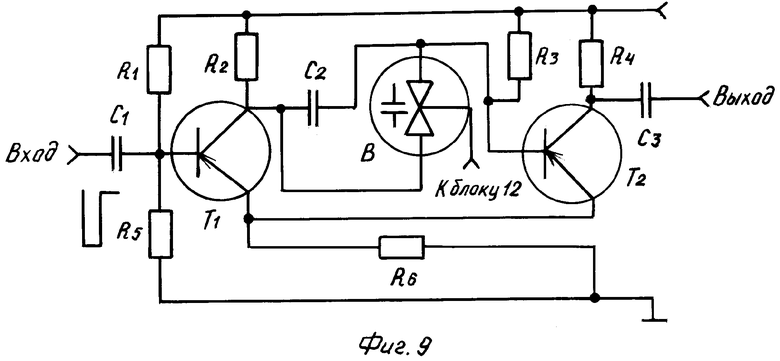
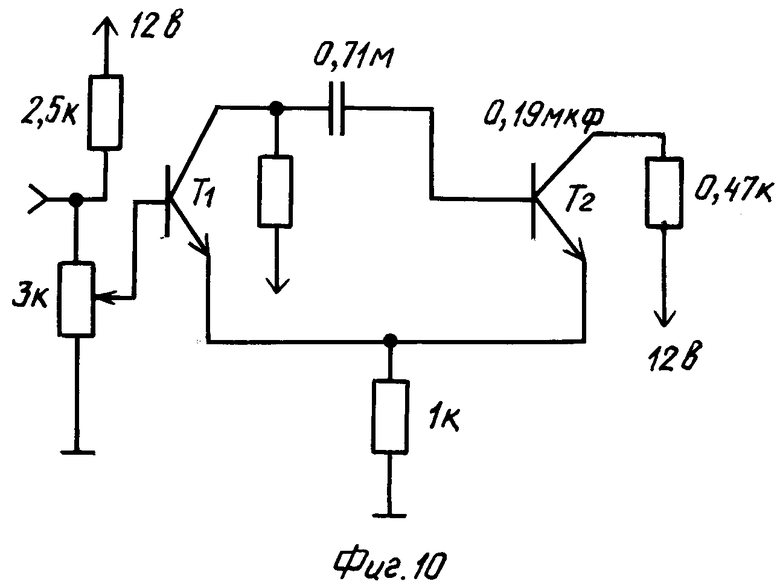
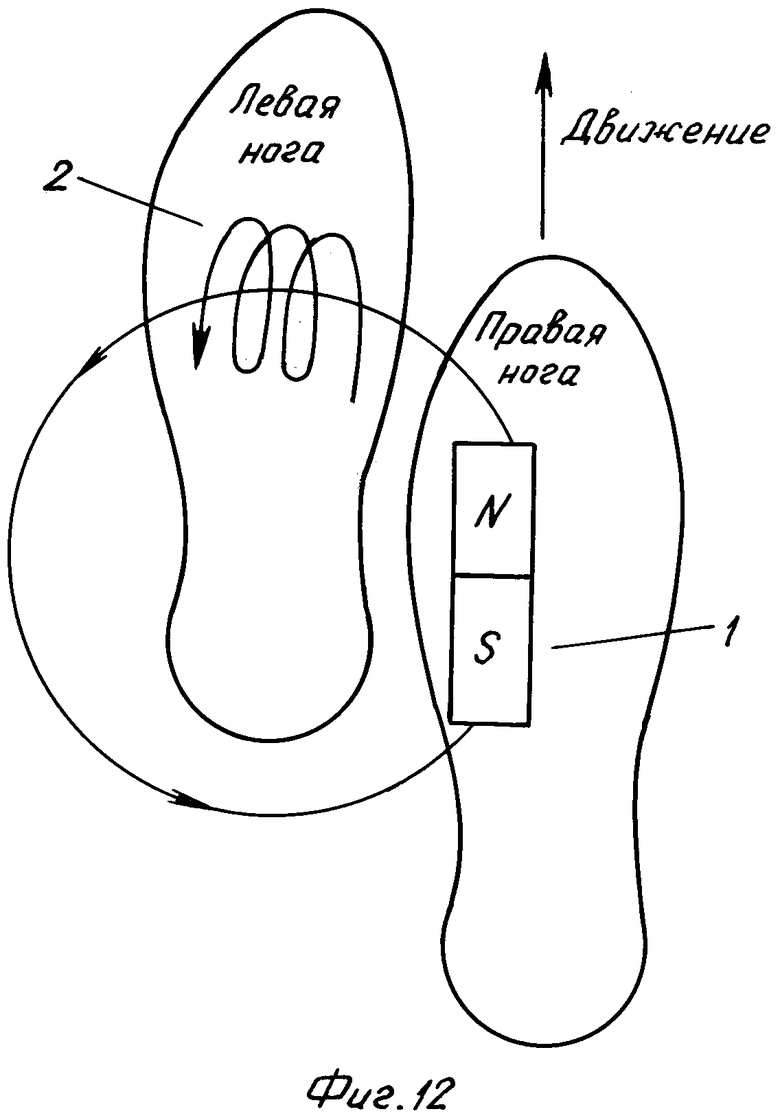
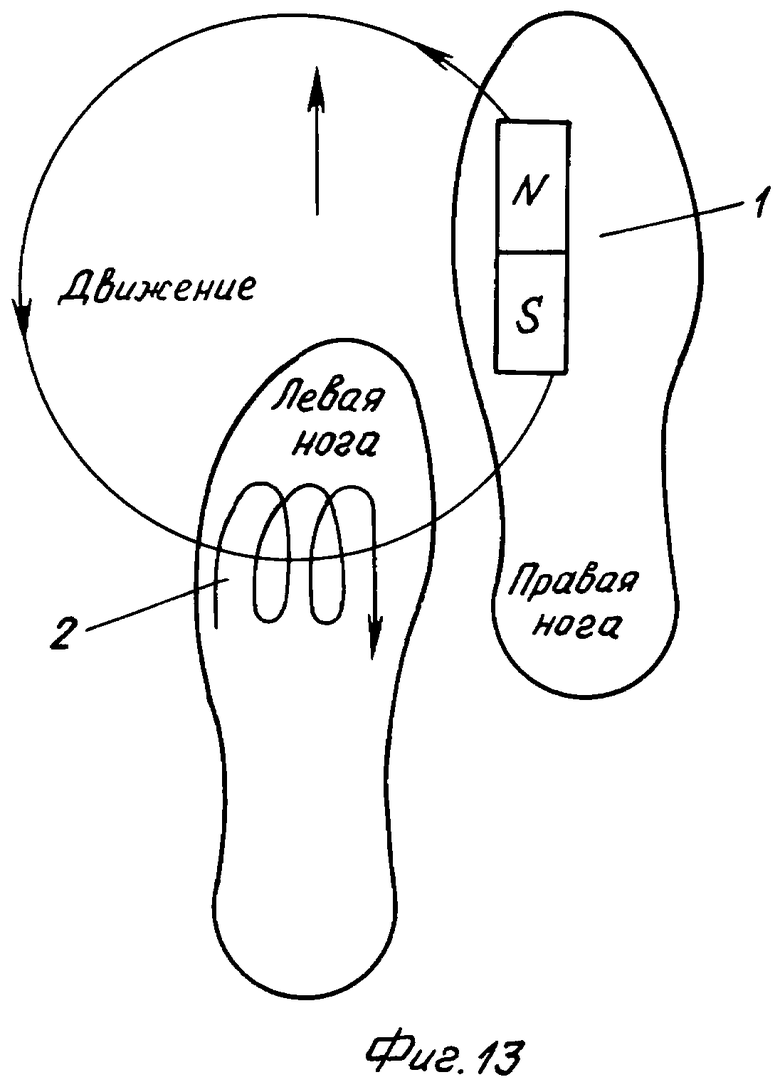
На фиг.1 изображена структурная схема бионического шагающего аппарата, на фиг.2 - структурная схема моторного блока и графики, поясняющие принцип работы устройства, на фиг.3 изображены сигналы, характеризующие работу бионического устройства управления шагающим аппаратом, на фиг.4 изображена принципиальная электрическая схема блока 6, на фиг.5 изображены конструкция тензодатчика и принципиальная электрическая схема тензоусилителя, на фиг.6 - принципиальные электрические схемы основных блоков бионического устройства управления, на фиг.7 изображена принципиальная электрическая схема блока 5, на фиг.8 изображено модулированное импульсное напряжение на выходе блока 5, на фиг.9 изображена принципиальная электрическая схема блока 3 для канала левой ноги на транзисторе p-n-p типа, на фиг.10 - принципиальная электрическая схема ждущего мультивибратора, генерирующего импульсы частотой 667 Гц при подаче на вход широкого запускающего вышепорогового импульса, на фиг.11 изображен график колебательного движения сердечника внутри электромагнита (34) при воздействии на него напряжения постоянной величины и демпфированное перемещение сердечника (35), на фиг.12 изображено движение правой ноги вперед, на фиг.13 изображено движение левой ноги вперед.
Бионический шагающий аппарат содержит бионическое устройство управления движением шагающего аппарата, генерирующее модулированный сигнал управления, аналогичный сигналу управления скелетными мышцами в живых системах (фиг.1) и моторный блок (фиг.2). Бионический шагающий аппарат содержит постоянный магнит 1, датчик 2 в виде обмотки, внутри которой расположен железный сердечник, с усилителем, соединенный с управляемым ждущим мультивибратором 3, который, в свою очередь, соединен с генератором импульсов 4, импульсным усилителем 5, входом амплитудного детектора с регулирующим шунтом и интегрирующей цепью 6, сумматором 7, усилителем мощности 8, моторным блоком 9, интегрирующую цепь 10, соединенную с управляемым ждущим мультивибратором, варикапом 11 и фазоинвертором 12, тензоусилитель 13, соединенный с сумматором и тензодатчиком 14.
Моторный блок (фиг.2) содержит стопу 15, в состав которой входят тензодатчики 14, соединенные с тензоусилителем 13, датчик 2 в виде обмотки, внутри которой расположен железный сердечник, с усилителем. Посредством соединительного элемента шарнира 16, образующего область голеностопного сочленения, стопа соединена с упругим вертикально стоящим стержнем голени 17, на котором закреплен сердечник из магнитного материала 18, помещенный в электромагнит 19. Вдоль голени установлены направляющие 20 и 21. Свободный конец стержня голени соединен с возвратной пружиной 22, которая, в свою очередь, соединена с верхней опорой 23.
Бионический шагающий аппарат работает следующим образом. В процессе движения под действием внешних устройств в момент прохождения нижней мертвой точки обеих ног на обмотке датчика 2 при прохождении в непосредственной близости от нее постоянного магнита 1 наводится ЭДС (фиг.12). Эта ЭДС усиливается усилителем и в виде треугольного импульса 27 (фиг.3) поступает на запуск ждущего мультивибратора с варикапом 3 (фиг.1). Последний вырабатывает импульс 28 (фиг.3), который затем поступает на запуск управляемого генератора импульсов 4 (фиг.1). Последний генерирует пачку импульсов 29 (фиг.3), длительность которой равна длительности импульса 28 (фиг.3). Пачка импульсов 29 (фиг.3) поступает на импульсный усилитель 5 (фиг.1) и далее в канал отрицательной обратной связи на вход амплитудного детектора с регулируемым шунтом и интегрирующей цепью 6 и на сумматор 7 (фиг.1). На выходе блока 6 (фиг.1) под действием одиночного импульса формируется напряжение 31 (фиг.3) в отрицательной полярности по отношению к импульсу, поступающему на вход блока 5 (фиг.1). На выходе блока 5 получается модулированная пачка импульсов 30 (фиг.3). Амплитуда импульсов в начале имеет максимально возможное значение, как показано на 30 (фиг.3). Пачка модулированных импульсов 30 (фиг.3) проходит через усилитель мощности 8 (фиг.1) и поступает на моторный блок 9 (фиг.1). Полученные модулированные импульсы аналогичны сигналу управления скелетными мышцами в живых системах.
Магнитное поле электромагнита 19 (фиг.2) изменяется также по модулированному закону 26 (фиг.2). Вначале магнитное поле максимально, что способствует разгону сердечника 18 (фиг.2). Затем при приближении к концу сгибания стопы магнитное поле ослабляется, препятствуя перерегулированию. В конце отталкивания магнитное поле вновь усиливается, способствуя развитию максимального усилия в момент отталкивания от опоры. Следовательно, благодаря воздействию на электромагнит 19 (фиг.2) модулированного напряжения 26 (фиг.2), сгибание стопы происходит в плавном апериодическом режиме 25 (фиг.2) без перерегулирования. Если бы напряжение на электромагнит 19 (фиг.2) поступало немодулированное, то сердечник двигался бы по траектории 34 (фиг.11), что отрицательно сказалось бы на выполнении заднего толчка.
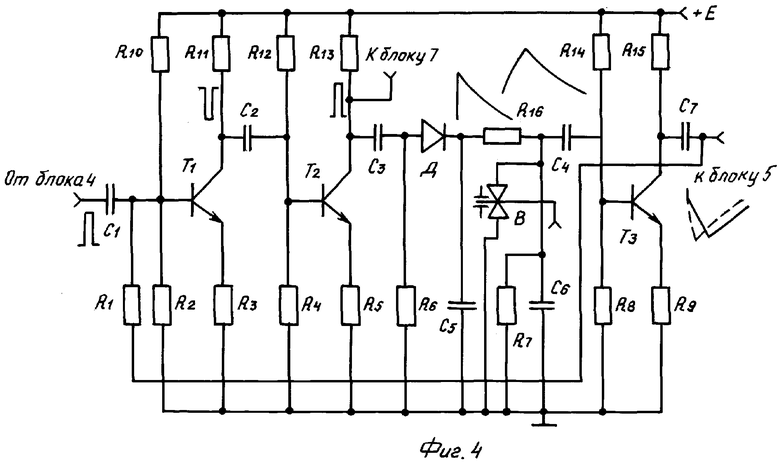
Поэтому управление работой двигательного механизма шагающего аппарата модулированным напряжением значительно улучшает динамику движения. В предлагаемом бионическом устройстве управления движением шагающего аппарата учитывается рельеф местности и частота движения. В зависимости от изменения этих параметров в процессе движения происходит автоматическая подстройка интенсивности и формы управляющего напряжения 26. Так, при изменении темпа движения выходные импульсы ждущего мультивибратора 3 (фиг.1) суммируются на интегрирующей цепи 10 (фиг.1) и поступают на варикап 11 (фиг.1), вызывая изменение его емкости, которая включается параллельно емкости амплитудного детектора с регулируемым шунтом и интегрирующей цепью 6 (фиг.1). Снижение темпа движения приведет к уменьшению напряжения на интегрирующей цепи 10 (фиг.1) и повышению напряжения на варикапе, включенном в цепь усилителя (фиг.1, 4), что приведет к уменьшению емкости С6 интегрирующей цепи R16C6. Увеличение емкости С6 приведет к изменению формы напряжения в цепи отрицательной обратной связи 6 (фиг.1), как показано на 31 пунктиром (фиг.3). Поэтому огибающая модулированного напряжения 30 (фиг.3) или 26 (фиг.2) будет смещаться в правую сторону, а при увеличении темпа движения - в левую сторону, увеличивая или уменьшая частоту огибающей управляющего напряжения. Длительность модулированного сигнала управления 30 (фиг.3) также зависит от темпа движения. При его уменьшении напряжение на интегрирующей цепи 10 (фиг.1) уменьшается. Уменьшенное напряжение через фазоинвертор 12 (фиг.1) увеличивает емкость варикапа блока 3 (фиг.1). Поэтому емкость зарядной цепи увеличивается. Это приводит к увеличению длительности выходного импульса 28 и, как следствие этого, увеличению длительности управляющего напряжения 30 (фиг.3) и 26 (фиг.2). Таким образом, при уменьшении темпа движения синхронно происходит увеличение длительности управляющего напряжения и уменьшение частоты огибающей. Это благоприятным образом сказывается на движении. При медленном темпе длительность управляющего напряжения должна быть больше, а частота огибающей должна быть меньше. Поэтому в предлагаемом бионическом шагающем аппарате учитывается темп передвижения и устройство управления реагирует на его изменение.
В предлагаемом бионическом шагающем аппарате учитывается также и рельеф местности. Если шагающий аппарат двигается с грузом вверх, то усилие отталкивания должно возрастать. Это происходит следующим образом. Усилие на тензодатчик 14 (фиг.2) возрастает. Напряжение на выходе тензодатчика 14 усиливается тензоусилителем 13 (фиг.2). Это повышенное напряжение поступает на сумматор 7 (фиг.1). На сумматоре 7 повышается коллекторное напряжение и увеличивается амплитуда выходного напряжения 30 (фиг.3) (или 26 на фиг.2). Поэтому на электромагнит 3 (фиг.2) поступает напряжение повышенной амплитуды и мощности. Таким образом, сила отталкивания от опоры увеличивается. Если шагающий аппарат без груза двигается вниз, сила отталкивания от опоры снижается. Это также благоприятным образом сказывается на динамике движения. Поэтому предлагаемое устройство реагирует на рельеф местности и на темп передвижения соответствующими изменениями параметров управляющего напряжения. Изменение напряжения на тензодатчике и тензоусилитиле при изменении профиля местности показано на 32 пунктиром (фиг.3), а изменение напряжения на интегрирующей цепи блока 10 (фиг.1) показано на 33 пунктиром (фиг.3). Синхронно с уменьшением частоты огибающей управляющего напряжения 26 (фиг.2) происходит уменьшение декремента затухания и, наоборот, при увеличении частоты огибающей управляющего напряжения 26 (фиг.2) происходит увеличение декремента затухания. Это очень важно, т.к. при изменении темпа движения должна одновременно уменьшаться или увеличиваться частота огибающей, а также и декремент затухания.
Дополнительные сведения: на вход блока 5 (импульсный усилитель, фиг.1 и 7) поступают два сигнала: серия импульсов с выхода блока 4 (фиг.1) поступает через конденсатор С1 на базу транзистора Т. На базу подается просуммированное от каждого импульса напряжение в отрицательной полярности. Это суммарное напряжение вызывает модуляцию импульсных сигналов на выходе блока 5 (фиг.1). Формирование модулированного сигнала показано на фиг.8. Вверху показаны импульсы на входе блока 5 (фиг.1) в виде импульсов положительной полярности. В средине показаны двухкомпонентные несимметричные экспоненты, снимаемые с выхода блока 6 (фиг.1). Внизу показано модулированное импульсное напряжение на выходе блока 5 (фиг.1). Как видно, первый импульс выходного модулированного напряжения блока 5 (фиг.1) имеет максимальную амплитуду, а остальные импульсы имеют более низкую амплитуду. Кроме того, в средней части серии амплитуда импульсов минимальна.
В блоке 2 (фиг.1) при приближении постоянного магнита происходит нарастание напряжения, а при удалении - уменьшение напряжения, т.е. формируется импульс одной полярности. При движении другой ноги магнит движется уже в обратном направлении и на датчике 2 (фиг.12) формируется импульс другой полярности. Поэтому при движении одной ноги формируется треугольный импульс одной полярности, а при движении другой ноги формируется треугольный импульс другой полярности (фиг.12 и 13). Схема блока 2 показана на фиг.6, внизу. Этот блок представляет собой обмотку, внутри которой находится железный сердечник. Устройство состоит из двух каналов (фиг.1): канала правой ноги и канала левой ноги. Поэтому блоков 3 два. Блок 3 (фиг.1) канала левой ноги срабатывает от импульса отрицательной полярности. Поэтому для канала левой ноги выбрана схема ждущего мультивибратора на p-n-p переходе (фиг.9). Блок 3 канала правой ноги срабатывает от импульса положительной полярности. Поэтому для канала правой ноги выбрана схема ждущего мультивибратора на n-p-n переходе, показанная на фиг.6. Так происходит разделение каналов левой и правой ноги. Управляемый ждущий мультивибратор 4 (фиг.1) может работать в режиме генерации серии импульсов. При напряжении на ждущем мультивибраторе больше пороговой величины он не может оставаться запертым длительное время, и схема переходит в режим самовозбуждения, генерируя периодическую последовательность импульсов. Поэтому режим работы мультивибратора с самовозбуждением широко применяется. Для его осуществления необходимо, чтобы длительность пачки импульсов на выходе была равна длительности широкого запускающего импульса. В устройстве широкий запускающий импульс 28 (фиг.3) подается на вход ждущего мультивибратора 4 (фиг.6 в центре слева), который генерирует пачку импульсов 29 (фиг.3). Длительность этой пачки равна длительности запускающего импульса большой ширины. Поэтому ждущий мультивибратор 4 (фиг.1) переходит в режим самовозбуждения под действием широкого входного импульса запуска 28 (фиг.3) и находится в таком возбужденном состоянии в течение всего периода действия запускающего импульса 28 (фиг.3). В предлагаемом устройстве использован такой режим. Использовано независимое включение моторного блока 9 (фиг.1) и внешнего устройства для выполнения движения ног.
Внешнее устройство организует движение ног. Это может быть электромотор с устройством для возвратно-поступающего движения или аналогичное другое устройство.
При подаче на электромагнит 3 (фиг.2) управляющего сигнала 26 (фиг.3) сгибание стопы шагающего аппарата будет происходить по кривой 25 (фиг.2). Иными словами, если на вход электромагнита 3 (фиг.2) будет подан сигнал специальной формы с колебательно-затухающим переходным процессом, то сгибание стопы будет происходить без перерегулирования по монотонно-возрастающей кривой 25 (фиг.2). Если бы на вход электромагнита 3 (фиг.2) был подан обычный сигнал с постоянной амплитудой, то движение стопы происходило бы по кривой 24 (фиг.2) с большим перерегулированием и низким быстродействием.
Это основано на том известном факте, что при подаче на электромагнит напряжения постоянной величины, движение железного сердечника будет происходить в колебательном режиме. Перемещение железного сердечника внутри электромагнита происходит по колебательной кривой 34 (фиг.11). Для снижения перерегулирования в технике используется специальный воздушный демпфер, под действием которого происходит снижение колебаний - кривая 35 (фиг.11). В предлагаемом устройстве для снижения колебаний также использован демпфер, но не воздушный, а электрический. В качестве электрического демпфера выступает форма самого сигнала управления.
Сигнал на выходе блока 5 (фиг.1) имеет форму, показанную на фиг.2 в виде сигнала 26. Блок 6 (фиг.1) по отношению к блоку 5 представляет канал отрицательной обратной связи, образованной амплитудным детектором и интегрирующей цепью. Под действием серии положительных импульсов на выходе блока 6 (фиг.1) образуется напряжение отрицательной полярности. Если в канале отрицательной обратной связи имеется двухзвенный фильтр, то сигнал на выходе блока 5 (фиг.1) будет иметь вид импульсов с колебательно-затухающим переходным процессом, как показано на фиг.2 в виде 26. Последовательность импульсов с колебательно-затухающим переходным процессом вида 26 (фиг.2) поступает на блок сумматора 7 (фиг.1), который представляет из себя усилитель с двумя входами. Этот блок выполняет функцию, аналогичную системе автоматического регулирования усиления радиовещательных радиоприемников. На другой вход этого блока поступает постоянное напряжение от блока 13 тензоусилителя (фиг.1). Поэтому вид напряжения 26 сохраняется. Меняется только его амплитуда.
Эффект от применения предлагаемого бионического устройства управления движением шагающего аппарата заключается в том, что с его помощью можно осуществить движение шагающего аппарата в любой местности с различным рельефом и при любом темпе движения в оптимальном режиме, т.е. без перерегулирования и с максимальным быстродействием. Оптимальный режим движения способствует повышению долговечности работы шагающего аппарата и повышению надежности его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственная стопа | 1985 |
|
SU1344350A1 |
| Активный протез нижней конечности с биоэлектрическим управлением | 1988 |
|
SU1731210A1 |
| Устройство управления двигательным аппаратом | 1988 |
|
SU1577784A1 |
| Устройство для моделирования мышечного сокращения | 1987 |
|
SU1503832A1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| БИОНИЧЕСКИЙ СТАБИЛИЗАТОР ДАВЛЕНИЯ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2003 |
|
RU2250487C1 |
| Устройство для исследования нервно-мышечной системы | 1990 |
|
SU1827171A1 |
| Ортопедическая стелька | 1988 |
|
SU1570723A1 |
| Устройство для управления электромагнитной резонансной вибромашиной | 1986 |
|
SU1433845A1 |
| ЛАЗЕРНЫЙ ДОЗИМЕТР С ПОЛУАВТОМАТИЧЕСКОЙ КОМПЕНСАЦИЕЙ ФОНОВОГО СВЕТА | 1992 |
|
RU2051339C1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях роботов (шагающих аппаратов). Технический результат - повышение плавности передвижения стопы шагающего аппарата путем устранения перерегулирования заднего толчка, повышение быстродействия сгибательного процесса и оптимизация двигательного режима в зависимости от рельефа местности и темпа движения. Бионический шагающий аппарат состоит из стопы, упругого вертикально стоящего стержня голени, который соединен со стопой посредством соединительного элемента шарнира для образования области голеностопного сочленения, блока управления. В стопе установлены тензодатчики, соединенные с тензоусилителем, который, в свою очередь, соединен с сумматором блока управления. Также введена соединенная с усилителем обмотка, внутри которой расположен железный сердечник, постоянный магнит, электромагнит с сердечником из магнитного материала, закрепленным на стержне голени, соединенный с усилителем мощности блока управления. Вдоль голени установлены направляющие, возвратная пружина, соединенная со свободным концом стержня голени и верхней опорой. Бионическое устройство управления движением шагающего аппарата содержит управляемый ждущий мультивибратор, соединенный с генератором импульсов, который, в свою очередь, соединен с импульсным усилителем, сумматором и входом амплитудного детектора с регулирующим шунтом и интегрирующей цепью, причем детектор соединен с усилителем мощности, интегрирующей цепью, варикапом и фазоинвертором. 13 ил.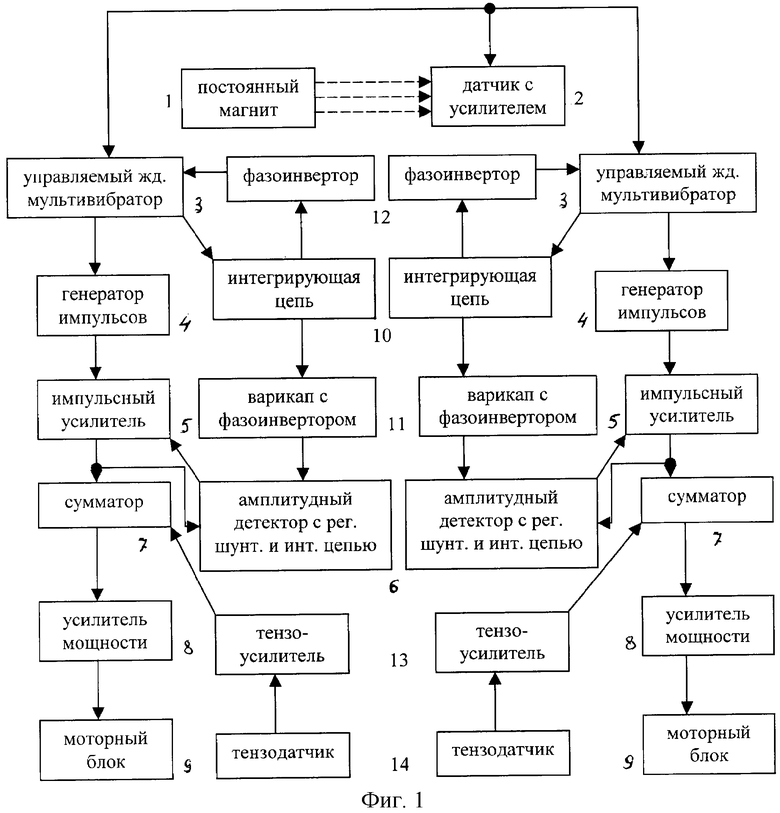
Бионический шагающий аппарат, состоящий из стопы, упругого вертикально стоящего стержня голени, который соединен со стопой посредством соединительного элемента шарнира для образования области голеностопного сочленения, блока управления, отличающийся тем, что он снабжен обмоткой, внутри которой расположен железный сердечник, соединенной с усилителем, постоянным магнитом, электромагнитом с сердечником из магнитного материала, закрепленным на стержне голени, соединенным с усилителем мощности блока управления, при этом вдоль голени установлены направляющие, возвратная пружина, соединенная со свободным концом стержня голени и верхней опорой, бионическое устройство управления движением шагающего аппарата содержит управляемый ждущий мультивибратор, соединенный с генератором импульсов, который, в свою очередь, соединен с импульсным усилителем, сумматором и входом амплитудного детектора с регулирующим шунтом и интегрирующей цепью, причем детектор соединен с усилителем мощности, интегрирующей цепью, варикапом и фазоинвертором, в стопе установлены тензодатчики, соединенные с тензоусилителем, который, в свою очередь, соединен с сумматором блока управления.
| RU 93038086 А, 27.05.1996 | |||
| ДВУНОГИЙ РОБОТ | 2001 |
|
RU2257995C2 |
| US 6064167 А, 16.05.2000 | |||
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |

