Известны имп.: ьсивные ;и:ганетарные редукторы с соосным рас-положением входного и выходного валов. Недостатком этих редукторов является наличие недолговечных автологов, работаюшисх с высокой. частотой В1ключения.
Для устранения этого недостатка и для увеличения передаточного числа в описываемом редукторе оси сателл-цтов снабжены эксцентричными пальцами, на которые надегы храповики, взаимодействующие поочередно с неподвижным храповым венцом, вследствие чего водило, соединенное с ведомым валом, получает вращательные импульсы.
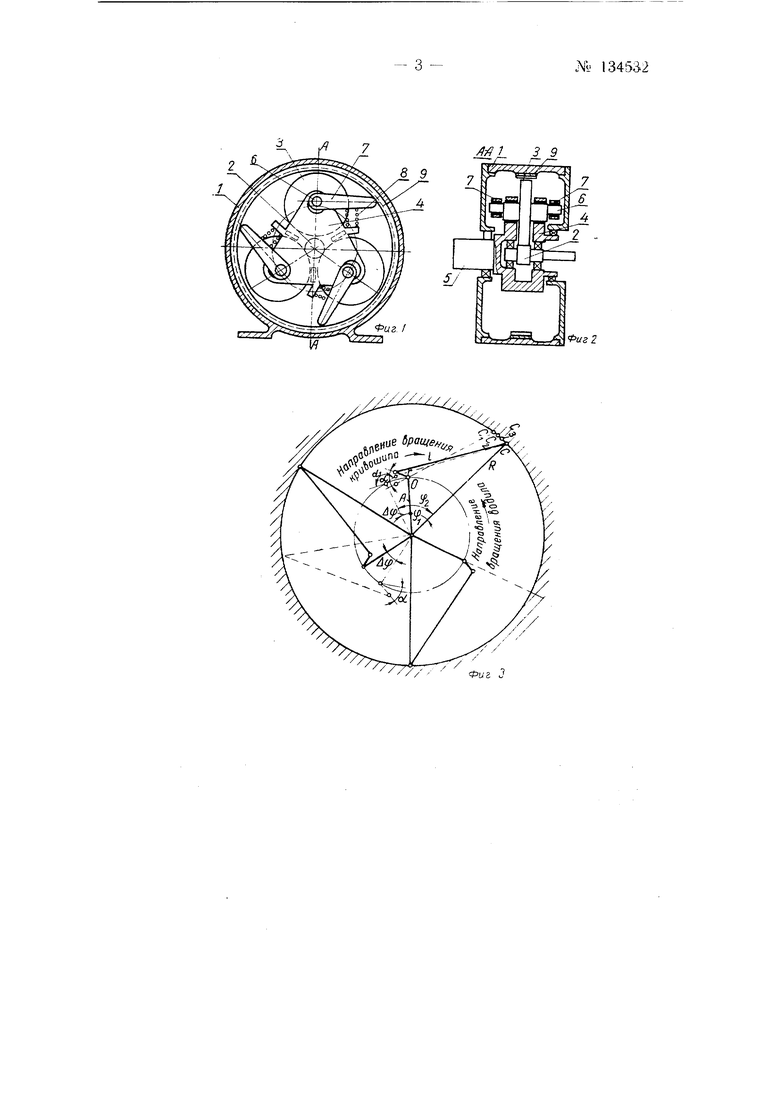
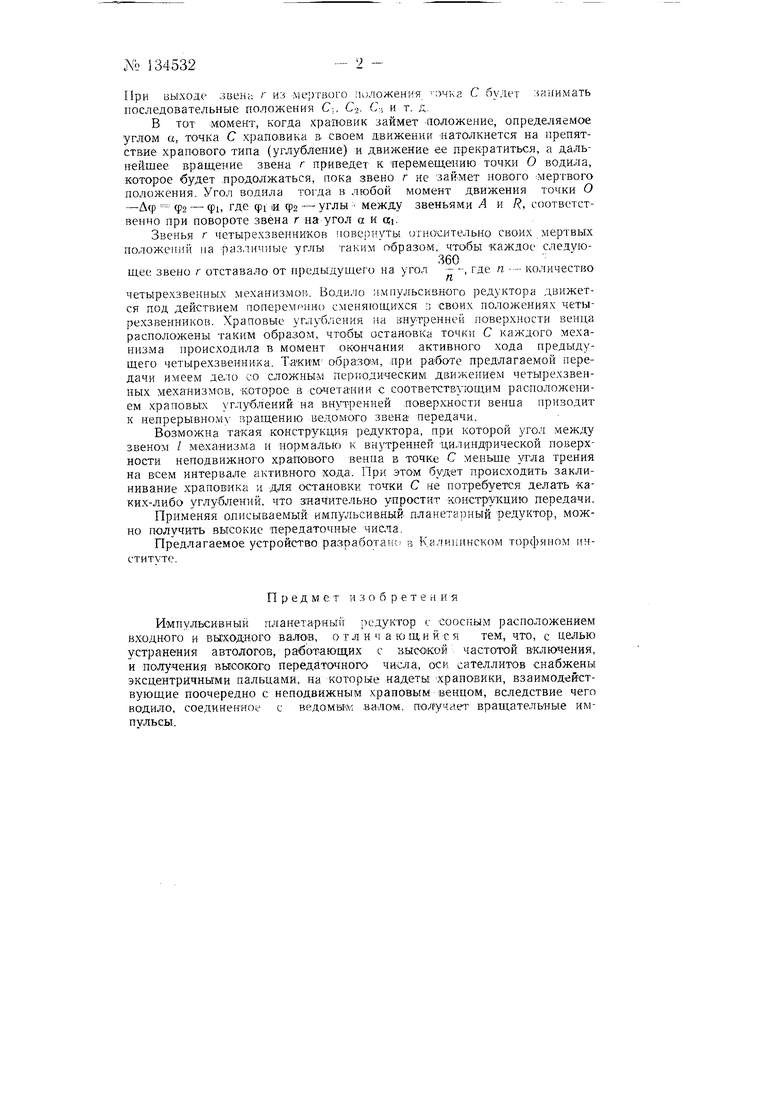
На фиг. 1 изображен планетарный редуктор, общий вид; на фиг. 2- разрез по Л-Л на фиг. 1; на фиг. 3-принципиальная схема описываемого редуктора.
Все механизмы привода размен1,ены з цилиндрическом корпусе /. Ведущая шестерня 2 вращает равномерно расположенные по окружности зубчатые колеса-сателлиты: 3, свя занные с водилом 4, соединенным с ведомым валом 5. Оси сателлитов 3 снабжены эксцентричными пальцами 6, на которые надеты храповики 7, прижимаемые легкими пружинами 8 к внутренней поверхности неподвижного храпового венца 9.
Принципиальная схема редуктора представляет собой систему четырехзвенных механизмов (фит. 3), образованных соединением центра водила с центро.м О сателлита (звено Л), центра О сателлита с центром эксцентрика (звено г), центра эксцентрика с точкой С на внутренней поверхности неподвижного храпового венца, полученной засечкой из центра эксцентрика радиусом, равны.м длине храповика (звено /), и точки С с геометрическим центром водила (звено R}.
В полученных системах четырехзвекников ведущими являются звенья г, получающие в редукторе одновременное и равномерное вращение. При вращении . г механизм имеет два мертвых положения.
jVb 134532
При выходе звена г из мертвого положения ачка С булет за}1имать последовательные положения С-.. С-2. С;; и т. д.
В тот момент, когда храповик займет -положение, определяемое углом и, точка С храповика в своем движении Натолкнется на препятствие храпового типа (углубление) и движение ее прекратиться, а дальнейшее вращение звена г приведет к перемещению точки О водила, которое будет .продолжаться, пока звено г не займет нового мертвого положения. Угол водила тогда в любой момент движения точки О -Дф ф2 - фь где ф1 и ф2 - углы между звеньями А и R, соответственно при повороте звена г на угол а и .
Звенья г четырехзвенниКов нове.п.уты относительно своих мертвых положений па различные углы таким Образом, чтобы каждое следующее звено г отставало от предыдущего на угол -, где п -- количество
четырехзвенных механизмов. Водило импульсивного редуктора движется под действием поперемг41но сменяющихся г; своих положениях четырехзвенников. Храповые углубления на внутренней поверхности венца расположены таким образом, чтобы остановка точки С каждого механизма происходила в момент окончания активного хода предыдущего четырехзвенника. Таким образовд, :при работе предлагаемой передачи имеем дело со сложным периодическим движением четырехзвенных механизмов, которое в сочетании с соответч:твующим расположением храповых углублений на внутренней .поверхности венпа приводит к непрерывному вращению ведомого звена передачи.
Возможна такая конструкция редуктора, при которой угол между звеном / механизма и нормалью к внутренней цилиндрической поверхности неподвижного храпового венпа в точке С меньще тла трения на всем интервале активного хода. При этом будет происходить заклинивание храповика и для остановки точки С не потребуется делать каких-либо углублений, что значительно упростит конструкцию передачи.
Применяя описываемый импульсивный планета1) редуктор, можно получить высокие Передаточные числа.
Предлагаемое устройство разработано з К ли1и1нском торфяном институте.
Предмет и з о б р е т е н и -я
Импульсивный планетарный редуктор с СООСРШМ расположением входного и вы:ходно.го валОе, отличающийся тем, что, с целью устранения автологов, работающих с высокой частотой включения, и получения высокого передаточного чнсла, оси сателлитов снабжены эксцентричными пальцами, на которые надеты храповики, взаимодействующие поочередно с неподвижным храповым щенцом, вследствие чего водило, соединенное с ведомвгм валом, получает вращатель-ные импульсы.
360 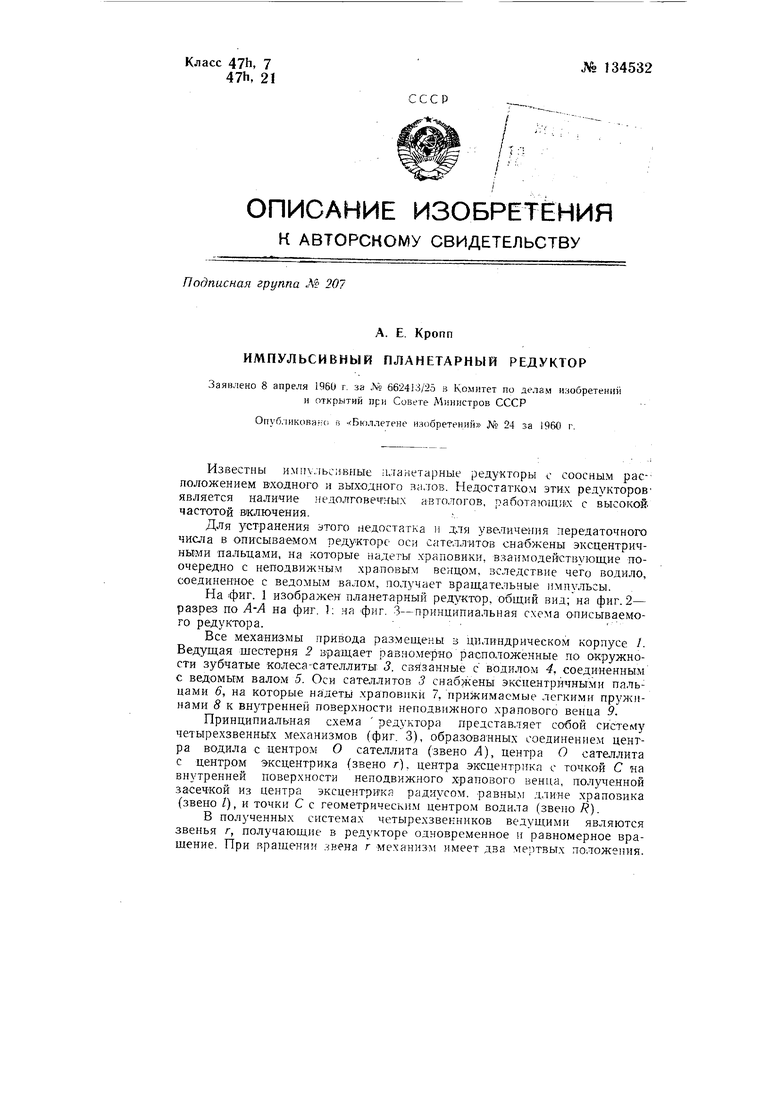
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный планетарный редуктор | 1961 |
|
SU151538A1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ПРИВОД ВРАЩАЮЩЕГОСЯ КОНВЕЙЕРА АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 1999 |
|
RU2172457C2 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| Лебедка | 1979 |
|
SU821394A1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| ПЛАНЕТАРНЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ С ДВОЙНЫМИ САТЕЛЛИТАМИ | 2008 |
|
RU2355923C1 |
| Планетарный механизм | 2022 |
|
RU2784105C1 |
| ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ИМПУЛЬСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2212575C1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |