(Л
14)
ния. Другой вход измерителя 1 соединен с задатчиком, выход к-рого через апериодическое звено I4 второго порядка подключен к входу первого сумматора (С) 5. Второй С 15 последовательно соединен с первым квадратором 16, вторым блоком 17 умножения (БУ) и третьим С 184 Последовательно соединены четвертый С 19, пятый С 20 и третий БУ 21, а также первый, второй и третий источники 22 - 24 опорного напряжения. Датчик 25 положения, датчик 26 скорости перемещения, датчик 27 усилия, четвертый БУ 28, второй квадратор 29 соединены последовательно. Выход источника 22 подключен к первым входам С 15 и 19, вторые входы к-рых соединены с выходом датчика 25 положения. Выход источника 23 подключен к третьему входу С 15, выход к-рого соединен с первым входом БУ
28, второй вход к-рого подключен к выходу датчика 2 7 и одновременно к второму входу БУ 17. Выход БУ 28 подключен к входу С 20. Втррой и третий входы С 18 соединены с выходом третьего источника 24 и через второй квадратор 29 - с выходом С 19. Второй вход БУ 21 подключен к выходу датчика 26 скорости. Последовательно соединены БУ 30 и первое апериодическое звено 31 перврго порядка, выход к-рого подключен к третьему входу С 5. Первый вход БУ 30 соединен с выходом БУ 21, а второй вход - с выходом первого дифференцирукмцего звена 2 с замедлением. Второй вход БУ 4 подключен к выходу С 18. При такой схеме в приводе обеспечивается инвариантность к изменению нагрузочных характеристик и к утечкам рабочей
ЖИДКОСТИ. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1579770A1 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| Электрогидравлический следящий привод робота | 1989 |
|
SU1723360A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1764990A1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| Устройство для управления приводом робота | 1988 |
|
SU1618642A1 |

Изобретение м.б. использовано в промышленных роботах. Цель изобретения - повышение точности и устойчивости следящего привода. Привод 7 регулирующего органа насоса 8 связан с гидромотором 11, вал 12 к-рого механически соединен с объектом управления и с датчиком 13 положения. Датчик I3 подключен своим выходом к второму входу измерителя 1 рассогласова
1
Изобретение относится к гидроавтоматике, может быть использовано в конструкциях промьтшенных роботов и является усовершенствованием изобретения по авт. св. № 1346858.
Целью изобретения является повьше- ние точности и устойчивости.
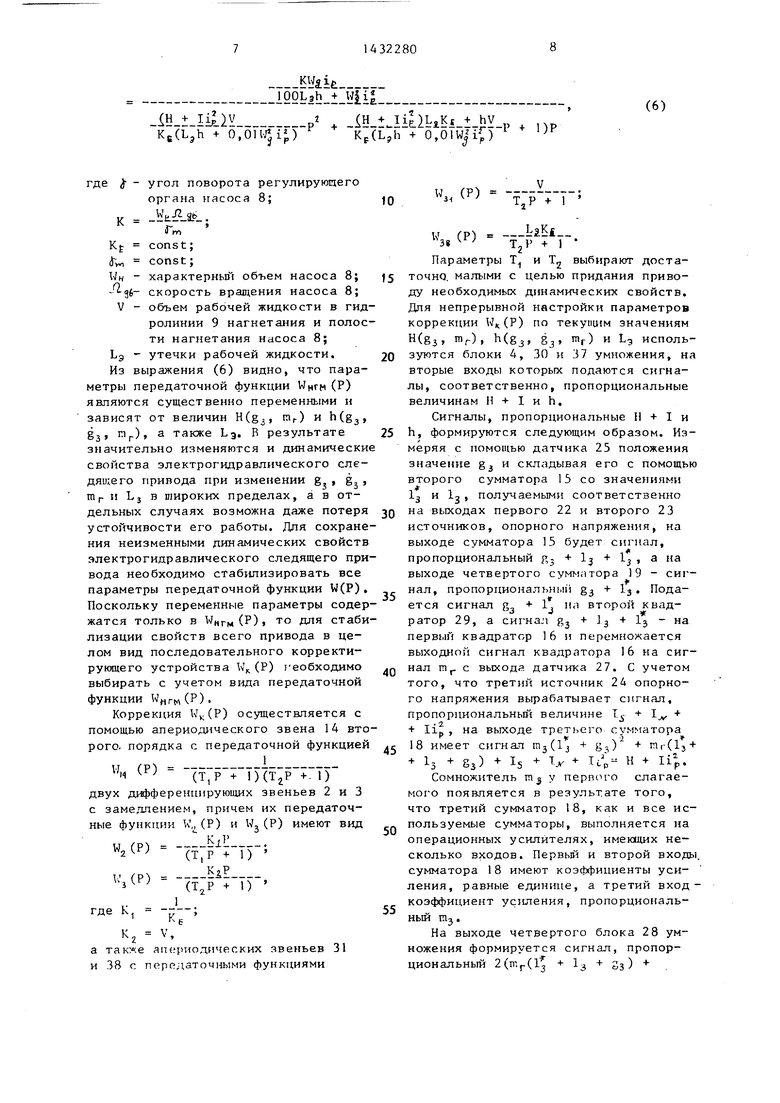
На фиг. 1 изображена принципиальная схема электрогидравлического следящего привода; на фиг. 2 - кинемати- ческая схема исполиительного органа робота.
Электрогидравлический следящий привод содержит задат чик (не показан) и последовательно .соединенные измери- тель 1 рассогласования, первое 2 и второе 3 дифференцирующие звенья с замедлением, первый блок 4 умножения, первый сумматор 5,первый усилитель 6, привод 7 регулирующего органа (не показан) насоса 8, связанного гидромотором 11, вал 12 которого механически соединен с объектом управления и датчиком 13 положения, подключенным своим выходом к второму входу измери- теля 1 рассогласования, другой- вход которого соединен с задатчиком, выход которого через апериодическое звено 14 второго порядка подключен к входу
первого сумматора 5, последовательно соединенные второй сумматор 15, первый квадратор 6, второй блок 17 умножения и третий сумматор 18, последовательно соединенные четвертый сумматор 19, пятый сумматор 20 и третий блок 21 умножения, а также первый 22, второй 23 и третий 24 источники опорного напряжения, датчик 25 положения датчик 26 скорости перемещения, датчик 27 усилия, четвертый блок 28 умножения, второй квадратор 29, причем выход первого источника 22 опорного напряжения подключен к первым входам второго 15 и четвертого 19 сумматоров, вторые входы которых соединены с выходом датчика 25 положения, выход второго источника 23 опорного напряжения подключен к третьему входу второго сумматора 15, выход которого соединен также с первым входом четвертого блока 28 умножения, второй вход которого подключен к выходу датчика 27 и одновременно к второму входу второго блока 17 умножения, а его выход - к второму входу пятого сумматора 20, второй и третий входы третьего сумматора 18 соединены соответственно с выходом третьего источника 24 опорного напряжения и через торой квадратор 29 с выходом четвертого сумматора 19, второй вход ретьего блока 21 умножения подключен.с к выходу датчика 26 скорости. Кроме ого, привод содержит последовательно соединенные пятый блок 30 умножеия и первое апериодическое звено 31 первого пЬрядка, выход которого под- ю ключен к третьему входу первого сум- матора 5, первьп вход пятого блока 30 умножения соединен с выходом третьего блока 21 умножения, а второй вход - с выходом первого Д11})ференци- 15 ующего эвена 2 с замедлением, втоой вход первого блока 4 умножения подключен к выходу третьего сумматора 18.
Исполнительный орган содержит 20 схват 32 для захват а груза 33, горизонтальное звено 34 с датчиками 25 и 26, вертикальное звено 35. Блоки 2, 3, 14, 31, 38 образуют корректирующее устройство. Датчик 27 размещен в 25 схвате 32. Кроме того, привод содерит последовательно соединенные блок 36 деления, иестой блок 37 умножения, второе апериодическое звено 38 первого порядка, выход которого подключен ЗО к четвертому входу первого сумматора 5, а также последовательно соединенные сумматор 39, второй усилитель 40 и седьмой блок 41 умножения, причем первьш и второй входы сумматора 39 подключены соответственно к выходам четвертого источника 42 опорного напряжения и третьего блока 21 умножения, вход делимого блока 36 деления подключен к выходу первого дифференцирующего звена 2 с замедлением, вход делителя - к выходу сумматора 39, а его выход соединен с входами второго дифференцирующего звена 3 с замедлением и пятого блока 30 умножения,вто- д рой вход седьмого блока 41 умножения подключен к выходу первого сумматора 5, а его выход - к входу первого усилителя 6. Гидромотор 11 связан валом 12 с редуктором (не показан).Пер- вьп и второй входы сумматора 18 имеют коэффициенты усилеш1я, равные единице, а третий коэффициент усиления пропорционален массе звена 34. Первый вход сумматора 20 имеет коэффициент усиления, пропорциональный двум массам звена 34, а второй - коэффициент усиления, равный двум. Датчик 27 служит для формирования сигнала, пропор-
35
40
50
55
ционал вход с усиле утечек
Кро сигнал щего у вующие 34 и 3 рость коорди (велич in - с и 34, и cons вращен его це cons горизо точки действ
При
Сиг усилит гулиру создав гидрол гидром положе сГ. Эле работе за сче в окнос ными х няются сущест казате утечек снижат и прив Для ка натой отрица динат кости привод движущ на (фи
Т
+ l5j
где I
О
5
0
ционального массе груза 33. Первый вход сумматора 39 имеет коэффициент усиле шя, пропорциональный величине утечек рабочей жидкости L,,
Кроме того, на фиг. 1 и 2 g,,4. сигнал желаемого положения с задающего устройства; g,, gj - соответствующие обобщенные коорд1{наты звеньев 34 и 35 объекта управления; g, - скорость изменения третьей обобщенной координаты cf - ошибка привода (величина рассогласования); т, mj, in - соответственно массы звеньев 35 и 34, и захваченного груза 33; 1 « const - исходное расстояние от оси вращения горизонтального звена 34 до его центра масс при gj 0; Ij const - расстояние от центра масс горизонтального звена 34 до средней точки схвата 32; Mg - маментное воздействие на выходной вал 12.
Привод работает следующим образом.
Сигнал cf после коррекции через усилитель 6 поступает на привод 7 регулирующего органа насоса 8, который, создавая поток рабочей жидкости в гидролиниях 9 и 10, воздействует на гидромотор I1, вал которого изменяет положение, уменьшая рассогласование сГ. Электрогидравлический привод при работе с различными грузами, а также за счет взаимовлияния степеней под- в окности обладает перемеН1Шми момент- ными характеристиками, которые изменяются Б широких пределах, что может существенно снижать качественные показатели работы. Кроме того, неучет утечек рабочей жидкости также может снижать качество управле 1ия приводом и приводить к потере устойчивости. Для качестве1шого управления координатой g| необходимо компенсировать отрицательное влияние изменения координат gj и gj и утечки рабочей с кости Ъз на динамические свойства привода. Кинетическая энергия Т всех движущихся масс исполнительного органа (фиг. 2) представляется в виде
Т
IisL + Ii.sL + Irsi
+ l5j: i 5iISi + iS-i±5 i2ilSi 22
где I 1ж+
) - момент инерции горизонтального звена 34 при вращении вокруг
5 14322806
вертикального звена 35Передаточная функция разомкнутого
со скоростью g, ;привода может быть представлена в
1г виде
+ i; +83) - момент инерции груза Siit) ,. .
33 отиосителыго верти-((t) i
кальной оси вращенияЫцг.(Р)М (Р), (3)
(вертикального звена . ,
ir-. Р символ дифференцирования;
W(P) - передаточная функция привода;
Ij - момент инерции верти- Ю ., )рч
кального звена 35 мае- ,,/,,4
WP(Р) - соответственно передаточные сои и, относительно ,,
„функции усилителя 6, регулипродольнои оси;„
-рующего органа насоса 8;.
If - момент инерции гори- „ .„. - ,
-,1 , W,,(P) - передаточная функция коррек- зонтального звена 34 15 „
„тирующего устройства;
массой тпа относитель- „Т
„W..,., - передаточная функция гидропеио поперечной оси,про-
редачи, состоящей из насоса ходящей через центр„ , ,
8 и гидромотора 1 1. масс;,.
Момент, развиваемый гидромотором
I - момент инерции вра- 20 . . щающегося вала 12 гид-
,
,
ромотора 11 и вращаю-Mrn(t) 0, Ijp-g, +
щихсл частей (редук-+ M(./ip(4)
тора (приведены к ва-,. / ч /,
X„.- при MrCt) О - момент сопротивлении.
лу гидромотора),.25 ; „ „
где Р - перепад давлении рабочей Учитывая, чтоt- / - жидкости в гидролиниях 9
., /i,и 10;
-- - (U- I)g, + m.(l, +.
ag °i3 передаточное отношение ре g.)g, + m.(i; . g + l.f- g.;30„
31 s °Ji °1i.T - хаоактеп
-}q характерный объем гидромотора 11,
d3T f-r т учетом выражения (1) и (2) соотdtagi s .v/6 jV 3ношение (4) принимает вид
I risi- ;ti; 35 O,OIW,P di,. H/i,)g,.
+ ij , + + g, + . (h/ip)g.,(5)
ax
- выражения (5) следует, что
о
можно считать, что моментное воздей-Q QiHi
ствие движущ 1зсся масс имеет вид40 ii.lil lM/iE..lP
Р (t) „„b/it., .
(H/ip + lip) Me H(g,m,)g + h(g g.OiOlWikinr)g,,.(1)
где H (gj, mp) - + g,) +45 -M.l lil.p j
+ шДЧ + g, + 1,) + I.- 1ч. (2)„
. В результате передаточная функция
h(gj, g , m,-) 2(тз(1 + g) (P) с учетом утечек рабочей жид+ 1Пр(1 + g + l5))g .кости (Ьэ ) приним;)ет вид
50
(1 K,L37Vp -(ГЦГиЦр)
,,.Kfi/Yt .
( 4- V ( J. ТГо:)
-(р)
(,+ VLip .OaOIWik/h ,
, . (.) (.., , ,,р
,
KWiit
mgL3h j: wii|.
г
.z
-lH l klLiK,i hV Kp(Ljh + 0,01Wji)
где jf - угол поворота регулирующего
органа насоса 8;
К - ..
г
Kf const;
(JV const;
WH - характерньш объем насоса 8;
скорость вращения насоса 8; V - объем рабочей жидкости в гидролинии 9 нагнетания и полости нагнетания насоса 8;
Lg - утечки рабочей жидкости.
Из выражения (6) видно, что параметры передаточной функции Ынгм (Р) янпяются существенно переменными и зависят от величин H(g, m) и h(g.j, §3, Пр), а также Ьэ. В результате значительно изменяются и динамически свойства электрогидравлического следящего привода при изменении g , g, Гор и LJ в широких пределах, а в отдельных случаях возможна даже потеря устойчивости его работы. Для сохранения неизменными динамических свойств электрогидравлического следящего привода необходимо стабилизировать все параметры передаточной функции W(P). Поскольку переменные параметры содержатся только в WHTMC) стабилизации свойств всего привода в целом вид последовательного корректирующего устройства v (Р) геобходимо выбирать с учетом вида передаточной функции (Р).
Коррекция Wj.(P) осуществляется с помощью апериодического звена 14 второго, порядка с передаточной функцией
|1 (Р) ()()
двух дифференцирующих звеньев 2 и 3 с замедлением, причем их передаточные функции W,, () и Wj (Р) имеют вид
.
(Т,Р 1)
,., .
( + 1)
где К ---;
6
К 2 V,
а апе риодических звеньев 31 и 38 с передаточными функциями
W, (Р)
.z
klLiK,i hV + 0,01Wji)
(6)
з. (Р)
TjP + 1
5
0
5 Q Q
с
5
5
0
з. (Р)
Ь2
+ 1
Параметры Т и Tg выбирают достаточно, малыми с целью придания приводу необходимьсх динамических свойств. Для непрерывной настройки параметров коррекции Wt;(P) по текуищм значениям H(g3, nir) , h(g, g, Шг) и Lg используются блоки 4, 30 и 37 умножения, на вторые входы которых подаются сигналы, соответственно, пропорциональные величинам И + I и h.
Сигналы, пропорциональные 11 + I и h, формируются следующим образом. Измеряя с помощью датчика 25 положения значение g и складывая его с помощью второго сумматора 15 со значениями 1 и Ij, получаемыми соответственно на выходах первого 22 и второго 23 источников, опорного напряжения, на выходе сумматора 15 будет сигнал, пропорциональный g, + Ij Ij з на выходе четвертого сумматора 19 - сигнал, пропорционал} ный g + 1. Подается сигнал g.j + Ij на второй квадратор 29, а сигнал gj + 1з 1э на первый квадратор 16 и перемножается выходной сигнал квадратора 16 на сигнал nij. с выхода датчика 27. С учетом того, что третий источник 24 опорного напряжения вырабатывает сигнал, пропорциональный величине 1 + 1 + + li, на выходе третьего сумматора
%.Л
18 имеет сигнал mjClj + gj) + rrirClj-t- + 1з + 8з) + Is + V H + li p.
Сомножитель m у перпого слагаемого появляется в результате того, что третий сумматор 18, как и все используемые сумматоры, выполняется на операционных усилителях, имеющих несколько входов. Первый и второй входы, сумматора 18 имеют коэффициенты усиления, равные единице, а третий вход- коэффициер{т усиления, пропорциональный trij.
На выходе четвертого блока 28 умножения формируется сигнал, пропорциональный 2(mp(l2 1з Зз)
+ mj(l + gg))« Причем сомножители 2
и m
-3 03
в последнем выражении появляются в результате того, что первый и второй входы пятого сумматора 20 имеют соответственно коэффициенты усиления 2гаJ и 2. После перемножения сигнала с выхода пятого сумматора 20 на сигнал с выхода датчика 26 скорости
+ 0,,, который подается на блок 36 деления. Второй усилитель 40 имеет коэффициент усиления, пропорциональный величине lOO/W ip. Второе- апериодическое звено 38 имеет передаточную функцию Таким обJ.2
разом, с учетом вида передаточных
на выходе третьего блока 21 умножения iо функций ), Wj (Р) , W (Р), W (Р),
будет сигнал, соответствугадий выражению для h (2), Первый вход сумматора 39 имеет коэффициент усиления, равный единице, а второй - пропорциональный Ьэ. Четвертый источник 42 Опорного напряжения имеет сигнал на выходе, пропорциональный 0,, На выходе сумматора 39 имеем сигнал,, пропорционапьньш величине Lgh +
Wjg (Р) на выходе седьмого блока 41 умножения сигнал имеет вид
.5 a fe:tSlkm:±:.:gsSa$p:..i:.,
п,р. j)rt,F. l))
В результате передаточная функция корректирующего устройства имеет вид
.1,
ЛР)
iH ; iitHр2
. + 0;L01W|ie.I KilLih + gjLOiW i|i
..„ -„
I -- - .
(Т,Р
odjp
+ i)(
О -I- I
a передаточная функция прямой цепи разомкнутого привода с учетом соотношений (6) и (7) имеет вид
W(P))W,(P)- | i ---;y -Из выражения (8) видно, что все параметры передаточной функции W(P) при введении разработанной коррекции WH(P) остаются постоянными, а следовательно, постоянными сохраняются и динамические свойства, и качественные показатели всего электрогидравлического привода в целом, т.е. точность и устойчивость привода не зависит от изменения нагрузочных характеристик H(g3,- Пг) и h(g3, 83, nir), а также от величины .утечек рабочей жидкости Ьэ. TaiaiM образом, в приводе обеспечивается инвариантность к изменению нагрузочных характеристик и к утечкам рабочей жидкости.
Формула изобретения
Электрогидравлический следящий привод по авт. св. 1346858, от+ 0,,, который подается на блок 36 деления. Второй усилитель 40 имеет коэффициент усиления, пропорциональный величине lOO/W ip. Второе- апериодическое звено 38 имеет передаточную функцию Таким обJ.2
разом, с учетом вида передаточных
iо функций ), Wj (Р) , W (Р), W (Р),
Wjg (Р) на выходе седьмого блока 41 умножения сигнал имеет вид
.5 a fe:tSlkm:±:.:gsSa$p:..i:.,
п,р. j)rt,F. l))
В результате передаточная функция корректирующего устройства имеет вид
.1,
1
(7),
- .
О -I- I
личающийся Тем, что, с целью повышения точности и устойчивости, он снабжен четвертым источником
опорного напряжения, последовательно 0 соединенными блоком деления, щестым блоком умножения и вторым апериодическим звеном первого порядка, подключенным вьпгодом к первому сумматору, а также последовательно соединен35 ными шестым сумматором, вторым усилителем и седьмым блоком умножения, . причем два входа шестого сумматора подключены к выходам четвертого источника опорного напряжения и третье0 го блока умножения, вход делимого
блока деления подключен к выходу первого дифференцирующего звена с замедлением, вход делителя - к выходу седьмого сумм атора, а выход соединен
45 с входами второго дифференцирующего звена с замедлением и пятого блока умножения, второй вход седьмого блока умножения подключен к выходу первого сумматора, а выход - к входу
0 первого усилителя.
N
l3
т,
J2
Фиг. 2
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
